1.本实用新型属于消防安全领域,尤其涉及一种灭火器自动开启装置控制电路。
背景技术:
2.随着科技的进步和社会的发展,消防机器人得到越来越多的应用,消防机器人按照主要功能分类有灭火机器人、火场侦查机器人、危险品泄漏探测机器人、破拆机器人、救人机器人、多功能消防机器人等,其中灭火机器人是使用最为广泛的。
3.目前,现有的灭火机器人主要通过连接消防水管进行喷水灭火或者背负水箱;通过接消防水管或者背负水箱灭火在很多地形复杂或者高楼灭火时,机器人无法携带进入起火点,应用非常不便,对灭火机器人负载能力要求很高。灭火机器人若能使用常规手提式灭火器进行灭火,将极大方便灭火机器人进入各种场景进行灭火。
技术实现要素:
4.本实用新型为了解决上述现有技术中存在的缺陷和不足,提供了一种可以通过通信接口接收外部控制指令,可以使用有线通信或者通过无线通信模块进行转接,非常方便消防队员在各种场景进行远程操控,从而不仅可以遥控操作打开各种手提灭火器,又能知道灭火器开关状态;同时可以很好的控制灭火器开启装置,开启装置可以适配各种手提式灭火器,极大的拓展灭火机器人的灭火场景,且成本低廉的灭火器自动开启装置控制电路。
5.本实用新型的技术方案:一种灭火器自动开启装置控制电路,包括主控单元、电源单元、通信单元、电机驱动单元、一号电机、二号电机、一号位置传感器、二号位置传感器、三号位置传感器、四号位置传感器和接口单元;所述接口单元与通信单元、电源单元和电机驱动单元相连;所述电源单元与主控单元和通信单元相连;所述主控单元与通信单元、电机驱动单元、一号位置传感器、二号位置传感器、三号位置传感器、四号位置传感器相连;所述电机驱动单元与一号电机和二号电机相连;灭火机器人通过接口单元为控制电路进行供电以及通信,通过相应通信指令指示两个电机进行相应动作,动作完成后主控单元通过四个位置传感器判断两个电机运动位置,同时通过接口单元反馈给灭火机器人,完成整个灭火动作。
6.优选地,所述主控单元为单片机及相关附属电路;
7.所述电源单元为低压差线性稳压器及附属电路,将外部电源进行电压转换为单片机模块及通信芯片进行供电;
8.所述通信单元为rs422通信转换芯片及附属电路;
9.所述电机驱动单元为有刷直流电机驱动芯片及附属电路。
10.优选地,所述一号电机和二号电机均为有刷直流电机;所述一号位置传感器、二号位置传感器、三号位置传感器和四号位置传感器均为红外传感器。
11.优选地,外部电源v1通过两口接线端p1接入电源单元,经过双向tvs管、防反向二极管d1后,再通过两个电容进行滤波后,接入低压差线性稳压器u1,u1再经过内部处理转换
后,降压至主控单元的单片机u4及通信单元的通信转换芯片u2相应的供电电压。
12.优选地,主控单元的单片机u4通过一步串行通信口与通信单元的通信转换芯片u2连接,单片机u4发送ttl电平至通信转换芯片u2,通信转换芯片u2进行内部电平转换,转换为rs422协议电平,电阻r2、r4为匹配电阻,电平转换完成后再通过4口接线端p2与外部设备进行通信。
13.优选地,主控单元的单片机u4通过两个通用i/o口与一号电机驱动芯片u3连接,其中一个i/o口通过高低电平控制电机转向,高电平顺时针,低电平逆时针;另一个i/o口发送脉宽调制方波控制电机转速,一号电机驱动芯片u3通过内部转换,输出相应电压、电流控制一号电机b1做出相应动作。
14.优选地,主控单元的单片机u4通过两个通用i/o口与二号电机驱动芯片u5连接,其中一个i/o口通过高低电平控制电机转向,高电平顺时针,低电平逆时针;另一个i/o口发送脉宽调制方波控制电机转速,二号电机驱动芯片u5通过内部转换,输出相应电压、电流控制二号电机b2做出相应动作。
15.优选地,一号位置传感器与二号位置传感器分别安装于一号电机b1连接的运动机构行程的两端,当一号电机b1控制的运动机构运动至一号位置传感器处,一号位置传感器便会输出一个高电平信号至单片机u4的某个i/o口,单片机u4接收信号后即停止输出方波至一号电机驱动芯片u3,一号电机b1停止转动,同时单片机u4通过通信接口向灭火机器人发送当前位置信息,单片机u4通过一号位置传感器及二号位置传感器感知一号电机b1的运动机构所处位置,并通过通信接口发送给灭火机器人,消防员再根据相应位置下达相应指令动作。
16.优选地,三号传感器与四号位置传感器分别安装于二号电机b2连接的运动机构行程的两端,当二号电机b2控制的运动机构运动至三号传感器处,三号传感器便会输出一个高电平信号至单片机u4的某个i/o口,单片机u4接收信号后即停止输出方波至二号电机驱动芯片u5,二号电机b2停止转动,同时单片机u4通过通信接口向灭火机器人发送当前位置信息,单片机u4通过三号传感器及四号位置传感器感知二号电机b2的运动机构所处位置,并通过通信接口发送给灭火机器人,消防员再根据相应位置下达相应指令动作。
17.本实用新型可以通过通信接口接收外部控制指令,可以使用有线通信或者通过无线通信模块进行转接,非常方便消防队员在各种场景进行远程操控,从而不仅可以遥控操作打开各种手提灭火器,又能知道灭火器开关状态;同时可以很好的控制灭火器开启装置,开启装置可以适配各种手提式灭火器,极大的拓展灭火机器人的灭火场景,且成本低廉。
附图说明
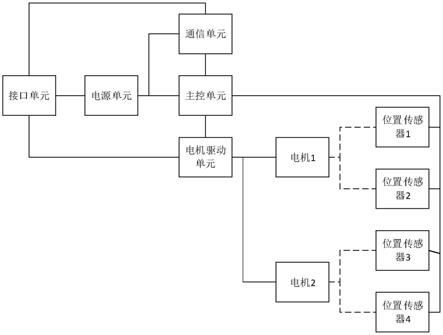
18.图1为本实用新型的电路框图;
19.图2为本实用新型的电源单元原理图;
20.图3为本实用新型的通信单元原理图;
21.图4为本实用新型的主控单元原理图;
22.图5为本实用新型的位置传感器原理图;
23.图6为本实用新型的接口单元原理图;
24.图7为本实用新型的电机及驱动单元原理图;
25.附图中的标号如下:
26.双向tvs管d2、二极管d1、电容c3、电容c1、低压差线性稳压器u1、电容c2、电容c4、电容c5、通信转换芯片u2、电阻r2、电阻r4、单片机u4、电容c8、电容c9、二号电机驱动芯片u5、一号电机驱动芯片u3、一号位置传感器o1、二号位置传感器o2、三号位置传感器o3、四号位置传感器o4、两口接线端p1、4口接线端p2、一号电机b1、二号电机b2。
具体实施方式
27.下面结合附图对本实用新型作进一步详细的说明,但并不是对本实用新型保护范围的限制。
28.如图1-7所示,一种灭火器自动开启装置控制电路,包括主控单元、电源单元、通信单元、电机驱动单元、一号电机、二号电机、一号位置传感器、二号位置传感器、三号位置传感器、四号位置传感器和接口单元;所述接口单元与通信单元、电源单元和电机驱动单元相连;所述电源单元与主控单元和通信单元相连;所述主控单元与通信单元、电机驱动单元、一号位置传感器、二号位置传感器、三号位置传感器、四号位置传感器相连;所述电机驱动单元与一号电机和二号电机相连;灭火机器人通过接口单元为控制电路进行供电以及通信,通过相应通信指令指示两个电机进行相应动作,动作完成后主控单元通过四个位置传感器判断两个电机运动位置,同时通过接口单元反馈给灭火机器人,完成整个灭火动作。
29.所述主控单元为单片机及相关附属电路;
30.所述电源单元为低压差线性稳压器及附属电路,将外部电源进行电压转换为单片机模块及通信芯片进行供电;
31.所述通信单元为rs422通信转换芯片及附属电路;
32.所述电机驱动单元为有刷直流电机驱动芯片及附属电路。
33.所述一号电机和二号电机均为有刷直流电机;所述一号位置传感器、二号位置传感器、三号位置传感器和四号位置传感器均为红外传感器。
34.外部电源v1通过两口接线端p1接入,经过双向tvs管d2、防反向二极管d1后,再通过两个电容c1和c3进行滤波后,接入低压差线性稳压器u1,u1再经过内部处理转换后,降压至单片机u4及通信转换芯片u2相应的供电电压。
35.单片机u4通过一步串行通信口与通信转换芯片u2连接,本实施方案选用rs422通信转换芯片,单片机u4发送ttl电平至通信转换芯片u2,通信转换芯片u2进行内部电平转换,转换为rs422协议电平,电阻r2、r4为匹配电阻,电平转换完成后再通过4口接线端p2与外部设备进行通信。
36.单片机u4通过两个通用输入/输出口(以下简称i/o口)与一号电机驱动芯片u3连接,其中一个i/o口通过高低电平控制电机转向,高电平顺时针,低电平逆时针;另一个i/o口发送脉宽调制方波控制电机转速,一号电机驱动芯片u3通过内部转换,输出相应电压、电流控制一号电机b1做出相应动作。
37.单片机u4通过两个通用i/o口与二号电机驱动芯片u5连接,其中一个i/o口通过高低电平控制电机转向,高电平顺时针,低电平逆时针;另一个i/o口发送脉宽调制方波控制电机转速,二号电机驱动芯片u5通过内部转换,输出相应电压、电流控制二号电机b2做出相应动作。
38.一号位置传感器o1与二号位置传感器o2分别安装于一号电机b1连接的运动机构行程的两端,当一号电机b1控制的运动机构运动至一号位置传感器o1处,一号位置传感器01便会输出一个高电平信号至单片机u4的某个i/o口,单片机u4接收信号后即停止输出方波至一号电机驱动芯片u3,一号电机b1停止转动,同时单片机u4通过通信接口向灭火机器人发送当前位置信息,单片机u4通过一号位置传感器o1及二号位置传感器o2感知一号电机b1的运动机构所处位置,并通过通信接口发送给灭火机器人,消防员再根据相应位置下达相应指令动作。
39.三号位置传感器o3与四号位置传感器o4分别安装于二号电机b2连接的运动机构行程的两端,当二号电机b2控制的运动机构运动至三号位置传感器o3处,三号位置传感器03便会输出一个高电平信号至单片机u4的某个i/o口,单片机u4接收信号后即停止输出方波至二号电机驱动芯片u5,二号电机b2停止转动,同时单片机u4通过通信接口向灭火机器人发送当前位置信息,单片机u4通过三号位置传感器o3及四号位置传感器o4感知二号电机b2的运动机构所处位置,并通过通信接口发送给灭火机器人,消防员再根据相应位置下达相应指令动作。
40.本实用新型可以通过通信接口接收外部控制指令,可以使用有线通信或者通过无线通信模块进行转接,非常方便消防队员在各种场景进行远程操控,从而不仅可以遥控操作打开各种手提灭火器,又能知道灭火器开关状态;同时可以很好的控制灭火器开启装置,开启装置可以适配各种手提式灭火器,极大的拓展灭火机器人的灭火场景,且成本低廉。