1.本发明涉及智能防护技术领域,具体涉及一种智能全方位作业带的预紧限力装置及其使用方法。
背景技术:
2.目前建筑工人在进行高空作业时,主要的安全保护措施为佩戴高空作业安全带,但现有的高空作业安全带的安全防护性有一定的局限性,佩戴人员在意外坠落时不能及时进行锁紧,且没有设置限力结构,不能很好的吸收撞击能力,减轻坠落时的冲击力,从而对佩戴人员造成伤害。其次,佩戴人员在使用安全挂锁时,经常发生操作不规范的情况,不能很好的执行高挂低用的安装规范,为了方便操作有些工人低挂高用安全带,一旦发生坠落,会增加冲击力,带来危险。可见,现有的高空作业安全带不能对佩戴人员提供全面的安全防护。
3.为了进一步规范佩戴人员的操作步骤,在高坠意外事故发生时给予佩戴人员多一份安全保护,将高坠事故的致残、致死率降到最低,有必要提供一种智能全方位作业带的预紧限力装置及其使用方法。
技术实现要素:
4.本发明主要目的在提供一种智能全方位作业带的预紧限力装置及其使用方法,以解决现有技术存在的问题。
5.为解决上述技术问题,本发明采取了如下技术方案:
6.一种智能全方位作业带的预紧限力装置,包括:
7.预紧机构,固定连接于作业带上,用于收紧作业带,消除作业带与人体之间的佩戴间隙,以使作业带进入预紧状态;
8.限力机构,固定连接于作业带上,用于限制作业带收紧的速度,增加作业带运动的阻力,避免因作业带约束力过大对佩戴人员造成伤害;
9.智能挂锁机构,一端可拆卸连接于作业带上,另一端可拆卸连接于固定构件上,用于监测作业带高挂低用,佩戴人员出现不规范操作时自动预警;
10.加速度传感器,用于检测佩戴人员的加速度,将检测到的加速度信号输送至控制器;
11.压力传感器,用于检测作业带对佩戴人员的约束力,将检测到的约束力信号输送至控制器;
12.控制器,当所述控制器接收到的加速度到达制动阈值时,所述控制器控制所述预紧机构启动,当所述控制器接收到的约束力达到设定阈值时,所述控制器控制所述限力机构启动。
13.进一步的,所述智能挂锁机构包括连接环、连接带和挂钩,连接带两端分别固定连接所述连接环和所述挂钩,所述连接环与作业带连接,所述挂钩与固定构件连接。
14.进一步的,所述挂钩处设置第一距离传感器,用于监测挂钩悬挂位置与地面的距离,所述连接环处设置第二距离传感器,用于监测连接环与作业带连接位置与地面的距离,所述第一距离传感器和第二距离传感器将检测到的距离信号输送至控制器。
15.进一步的,所述智能挂锁机构还包括蜂鸣器,所述蜂鸣器与所述控制器连接,所述控制器接收第一距离传感器和第二距离传感器的距离信号,当两者的垂直距离差小于安全阈值时,所述控制器控制所述蜂鸣器进行预警。
16.进一步的,所述预紧机构包括预紧带和气体发生器,所述气体发生器设置于所述预紧带上,所述预紧带套设于作业带上,所述预紧带内设置气体发生剂,当所述控制器接收到的加速度到达制动阈值时,所述控制器启动气体发生器,将气体发生剂转换为气体,气体快速充满所述预紧带,间接消除作业带与人体之间的佩戴间隙,作业带进入预紧状态。
17.进一步的,所述限力机构包括限力块,所述限力块内设空腔,两端设置开口,作业带贯穿所述开口并与所述限力块滑动连接。
18.进一步的,所述限力块相对的两内壁上分别固定设置第一弹簧和第二弹簧,所述第一弹簧外端设置电磁铁,所述第二弹簧外端设置永磁铁,所述电磁铁与所述控制器电连接。
19.一种智能全方位作业带预紧限力装置的使用方法,包括以下步骤:
20.s1.通过连接环将连接带与作业带连接,通过挂钩将连接带与施工的固定构件连接,此时人体佩戴作业带,智能挂锁机构一端连接作业带,另一端连接固定构件;
21.s2.第一距离传感器将挂钩悬挂处的高度信号传递至控制器,第二距离传感器将连接环与作业带连接处的高度信号传递至控制器,控制器判断两者的垂直高度差,高度差小于安全阈值时,控制器控制蜂鸣器进行预警;
22.s3.当作业人员出现意外坠落的情况时,加速度传感器检测到人体的加速度,将检测到的加速度信号输送至控制器,当控制器接收到的加速度到达制动阈值时,控制器控制预紧机构启动,消除作业带与人体之间的佩戴间隙,作业带进入预紧状态;
23.s4.在进行预紧时,作业带上的压力传感器检测作业带对佩戴人员的约束力,将检测到的约束力信号输送至控制器,当控制器接收到的约束力达到设定阈值时,控制器控制限力机构启动,增加作业带运动的阻力,避免因作业带约束力过大对佩戴人员造成伤害。
24.与现有技术相比,本发明具有以下有益效果:
25.本发明将预紧机构、限力机构和智能挂锁机构有机融合,设置控制器,将机械制动改为电子控制制动,作业人员出现意外坠落后,相应时间短,控制器可以根据加速度传感器传输的加速度信号控制预紧机构启动,防止由于高坠情况导致作业带无法绑紧作业人员的情况发生,安全性能大大提升;控制器可以根据压力传感器传输的约束力信号控制限力机构启动,避免因作业带约束力过大对佩戴人员造成伤害,提高了作业人员佩戴的舒适性;设置智能挂锁机构,可以监测作业带高挂低用情况,控制器判断第一距离传感器和第二距离传感器所处位置的垂直高度差,当高度差小于安全阈值时,控制器控制蜂鸣器进行预警,最终极大的降低了高空作业人员坠落的风险。
附图说明
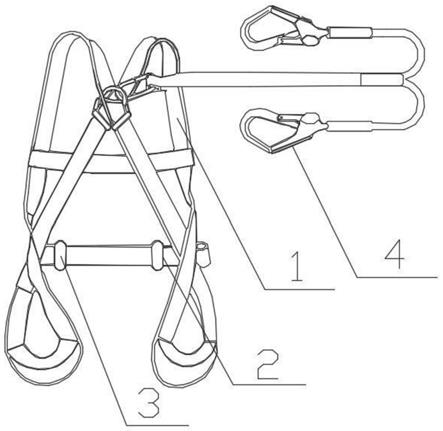
26.图1为本发明实施例1整体结构示意图。
27.图2为本发明实施例1智能挂锁机构结构示意图。
28.图3为本发明实施例1限力块结构示意图。
29.图4为本发明实施例1限力块内部结构示意图。
30.图5为本发明实施例1控制器原理框图。
31.图6为本发明实施例2预紧机构结构示意图。
32.图7为本发明实施例2预紧机构内部结构示意图。
33.图8为本发明实施例2卷收器的结构示意图。
34.其中,1
‑
作业带,2
‑
预紧机构,3
‑
限力机构,31
‑
限力块,311
‑
开口,32
‑
第一弹簧,33
‑
第二弹簧,34
‑
电磁铁,35
‑
永磁铁,4
‑
智能挂锁机构,41
‑
连接环,42
‑
连接带,43
‑
挂钩,5
‑
减速齿轮,6
‑
铝外壳,71
‑
芯轴,72
‑
框架,73
‑
锁止器,74
‑
回卷涡簧,81
‑
转缩轮盘,82
‑
拨杆,83
‑
拨盘,84
‑
压杆,85
‑
棘轮轴套,86
‑
盖板,87
‑
棘爪,88
‑
旋转杆,89
‑
弹簧,831
‑
滑槽。
具体实施方式
35.以下通过附图和实施例对本发明的技术方案作进一步说明。
36.实施例1
37.结合图1至图5,本发明提供一种智能全方位作业带的预紧限力装置,包括:预紧机构2,固定连接于作业带1上,用于收紧作业带1,消除作业带1与人体之间的佩戴间隙,以使作业带1进入预紧状态;
38.限力机构3,固定连接于作业带1上,用于限制作业带1收紧的速度,增加作业带1运动的阻力,避免因作业带1约束力过大对佩戴人员造成伤害;
39.智能挂锁机构4,一端可拆卸连接于作业带1上,另一端可拆卸连接于固定构件上,用于监测作业带1高挂低用,佩戴人员出现不规范操作时自动预警;
40.加速度传感器,用于检测佩戴人员的加速度,将检测到的加速度信号输送至控制器;
41.压力传感器,用于检测作业带1对佩戴人员的约束力,将检测到的约束力信号输送至控制器;
42.控制器,当所述控制器接收到的加速度到达制动阈值时,所述控制器控制所述预紧机构启动2,当所述控制器接收到的约束力达到设定阈值时,所述控制器控制所述限力机构3启动。本实施例中,将制动阈值设置为9.8m/s2,当人体的加速度达到重力加速度时,即人体下坠的瞬间,控制器控制预紧机构2启动。
43.优选的,所述智能挂锁机构4包括连接环41、连接带42和挂钩43,连接带42两端分别固定连接所述连接环41和所述挂钩43,所述连接环41与作业带42连接,所述挂钩43与固定构件连接。所述挂钩43处设置第一距离传感器,用于监测挂钩43悬挂位置与地面的距离,所述连接环41处设置第二距离传感器,用于监测连接环41与作业带1连接位置与地面的距离,所述第一距离传感器和第二距离传感器将检测到的距离信号输送至控制器。所述智能挂锁机构4还包括蜂鸣器,所述蜂鸣器与所述控制器连接,所述控制器接收第一距离传感器和第二距离传感器的距离信号,当两者的垂直距离差小于安全阈值时,所述控制器控制所述蜂鸣器进行预警。本实施例中,作业带1和连接带42均采用高强尼龙织物制成。
44.优选的,所述预紧机构2包括预紧带和气体发生器,所述气体发生器设置于所述预
紧带上,预紧带套设于作业带上,所述预紧带内设置气体发生剂,当所述控制器接收到的加速度到达制动阈值时,所述控制器启动气体发生器,将气体发生剂转换为气体,气体快速充满所述预紧带,间接消除作业带1与人体之间的佩戴间隙,作业带1进入预紧状态。如图1所示,本实施例中,设置一个预紧机构2,设置在作业带1的腰部,在另一实施例中,可以设置在作业带1的任意部位,还可以设置多个预紧机构2。预紧带采用防裂性能好的聚酰胺织物制成,是一种半硬的泡沫塑料,能承受较大的压力。本发明将预紧机构2从机械制动改为电子控制制动,整体结构便捷轻巧,利用气体膨胀达到预紧效果,构思巧妙。
45.优选的,所述限力机构3包括限力块31,所述限力块31内设空腔,两端设置开口311,作业带1贯穿所述开口311并与所述限力块31滑动连接。所述限力块31相对的两内壁上分别固定设置第一弹簧32和第二弹簧33,所述第一弹簧32外端设置电磁铁34,所述第二弹簧33外端设置永磁铁35,所述电磁铁34与所述控制器电连接。
46.本实施例中,当需要进行限力时,控制器控制电磁铁34通电,产生与永磁铁35相反的磁场,电磁铁34与永磁铁35相互吸引,带动第一弹簧32和第二弹簧33拉伸,从而使得电磁铁34与永磁铁35相互接近,最终夹紧作业带1,增加作业带1运动的阻力,避免因作业带1约束力过大对佩戴人员造成伤害。限力完成后,控制器控制电磁铁34断电或输入反向电流,电磁铁34与永磁铁35不再相互吸引,第一弹簧32和第二弹簧33依靠自身弹力或反向作用力恢复原状。如图1所示,本实施例中,设置一个限力机构3,设置在作业带1的腰部。
47.一种智能全方位作业带预紧限力装置的使用方法,包括以下步骤:
48.s1.通过连接环41将连接带42与作业带1连接,通过挂钩43将连接带42与施工的固定构件连接,此时人体佩戴作业带1,智能挂锁机构4一端连接作业带1,另一端连接固定构件;
49.s2.第一距离传感器将挂钩43悬挂处的高度信号传递至控制器,第二距离传感器将连接环42与作业带1连接处的高度信号传递至控制器,控制器判断两者的垂直高度差,高度差小于安全阈值时,控制器控制蜂鸣器进行预警;
50.s3.当作业人员出现意外坠落的情况时,加速度传感器检测到人体的加速度,将检测到的加速度信号输送至控制器,当控制器接收到的加速度到达制动阈值时,控制器控制预紧机构2启动,消除作业带1与人体之间的佩戴间隙,作业带1进入预紧状态;
51.s4.在进行预紧时,作业带1上的压力传感器检测作业带对佩戴人员的约束力,将检测到的约束力信号输送至控制器,当控制器接收到的约束力达到设定阈值时,控制器控制限力机构3启动,增加作业带1运动的阻力,避免因作业带1约束力过大对佩戴人员造成伤害。
52.实施例2
53.结合图6至图8,本实施例提供另一种预紧机构的具体方案。
54.预紧机构包括转缩轮盘81、拨杆82、拨盘83、压杆84、棘轮轴套85、盖板86、棘爪87、旋转杆88、弹簧89,转缩轮盘81通过减速齿轮5与电机连接,棘轮轴套85与卷收器连接,拔盘83上设有复数条滑槽831,滑槽831的一端远离拨盘83轴心,另一端则靠近轴心,其分别与对应的复数个棘爪87的拔杆82配合,拨杆82能够在滑槽831内移动,棘爪87分别沿周向均布安装于转缩轮盘81内,且能够绕固定在转缩轮盘81上的旋转杆88转动,棘轮轴套85、盖板86、拨盘83依次同心安装于转缩轮盘81上,其中棘轮轴套85安装于转缩轮盘81的内槽上,其外
侧能与棘爪87啮合,盖板86将棘轮轴套85的棘轮部分与棘爪87封装在转缩轮盘81的内槽中,压杆84安装在铝外壳6上,弹簧89使压杆84作用力在拨盘83上,使拨盘83旋转滞后于转缩轮盘81,从而拨杆82在滑槽内831滑动,实现棘轮轴套85与棘爪87的啮合与分离。
55.本实施例中,直流电机通过安装板与铝外壳6铆接固定,而直流电机的动力输出轴与减速齿轮5连接,减速齿轮5与预紧机构相连,预紧机构与卷收器的芯轴71一端花键连接,直流电机通过预紧机构带动卷收器将作业带收紧。卷收器包括芯轴71、框架72、锁止器73和回卷涡簧74。
56.使用时,直流电机旋转驱动转缩轮盘81旋转,而拨盘83在压杆84受弹簧89弹力的作用下被施加压力,其旋转滞后于转缩轮盘81,使得拨盘83与转缩轮盘81产生相对转角,这个相对转角能使拨杆82在滑槽831内滑动,从而实现棘爪87与棘轮轴套85的啮合与分离,即直流电机正向旋转能将运动与动力传递给卷收器芯轴71。
57.仅是本发明较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。