1.本发明涉及消防机器人技术领域,具体为不间断供水消防灭火机器人系统。
背景技术:
2.火灾是最经常、最普遍地威胁公众安全和社会发展的主要灾害之一。尤其是对于危险化学品火灾,不同着火物需使用对应不同灭火剂灭火,否则会出现难以处置、更复杂和更危险的事故,故需要对着火源定点精准扑救。随着科技的不断发展发展,消防机器人越来越多的代替消防队员进入到火场一线进行灭火战斗,机器人可以代替消防人员进行某些危险的工作,并能在紧张的消防救援过程中争取到宝贵的时间,确保救援任务顺利开展的时效性及科学性。
3.目前国内电动消防机器人由于自重、动力性能和拖拽能力的限制,主要搭载30~80l/s的中小型消防水炮,其流量不能满足油罐和大型仓库的灭火需求。国内少数企业也开发了柴油动力型大功率消防机器人,搭载120l/s以上的消防水炮。消防机器人在短时间内消耗大量的水,其供水问题一直未得到有效解决。
4.现有消防机器人的供水方式分为两种,一种是自携水箱,依靠水箱供水,另一种是拖拽水管,靠水管连接供水设备供水。水箱供水的方式可以避免拖拽沉重的水管,提高机器人的灵活性,但水箱体积受机器人动力性能限制,无法搭载足量消防用水,需不断对水箱进行补水作业,影响灭火效率;拖拽水管的方式虽然能满足水泡的用水需求,但水管与地面摩擦严重,机器人负荷较重,受水管长度影响,难以满足远距离灭火要求。
5.另一方面,面对恶劣的现场环境,摄像仪、红外热像仪等设备通常依靠专用的云台搭载于消防机器人上,实现远程火场或救援现场监控,将实时图像传回现场指挥部中指挥车,通过3g网络或其它中继甚至能将现场实况传回总队指挥中心,为救援现场或火灾现场提供实时的空中全方位立体影像,利于现场指挥员做出更为有利的决策提供依据。
6.但是现有的消防机器人的云台与连接轴之间通过一体式的减震橡胶垫连接,在机器人行走过程中,摄像仪、红外热像仪等设备具有较大的重量,随时产生震动影响云台的稳定,特别是越障过程中震动较大,对减震垫产生较大的侧向弯矩,易导致减震垫撕裂,使云台跌落损坏,影响使用寿命。
7.因此,研发不间断供水消防灭火机器人系统,替代消防人员进入易燃、易爆、有毒、缺氧、浓烟等危险事故现场,有效解决消防人员在上述场所面临的供水不足、图像、数据信息采集稳定性差等问题,成为十分重要的课题。
技术实现要素:
8.本发明的目的在于提供不间断供水消防灭火机器人系统,以解决上述背景技术中提出的问题。
9.不间断供水消防灭火机器人系统,其包括通过水管连接的供水车和消防灭火机器人,所述消防灭火机器人包括:
10.底盘及安装于底盘上的行进机构;
11.安装于底盘上方的水箱、高压泵、消防水泡;
12.水箱上设置的进水口;
13.安装于底盘上的、用于搭载水管的卷盘;
14.卷盘搭载的水管首端连接水箱的进水口,末端与供水车的供水接头连接;卷盘内设置有卷簧保持水管收放过程中始终缠绕收紧;
15.所述高压泵通过管路分别连接水箱、消防水泡,水箱中的水经高压泵增压后由消防水泡发射。
16.进一步,所述水箱上方设置有与水箱固定连接的支撑轴;支撑轴上安装有云台;云台顶部的两侧分别搭载有摄像仪、红外热像仪;支撑轴与云台之间设置有减震机构。
17.进一步,底盘上还安装有避障激光雷达。
18.进一步,水箱上方安装有导航激光雷达。
19.进一步,所述支撑轴及设置于支撑轴上的轴座;云台及设置于云台底部的云台支座;减震机构设置有:
20.安装于轴座和云台支座之间的大减震垫;
21.将轴座、云台支座、大减震垫紧固连接的若干连接单元;
22.所述连接单元包括小减震垫、套管、螺栓、螺母;
23.所述小减震垫安装于轴座下方;
24.云台支座、大减震垫、轴座、小减震垫内部开设有通孔,螺栓安装于所述通孔中,螺栓底部由螺母锁紧;
25.小减震垫与螺母之间设置有大垫圈;
26.大减震垫、轴座、小减震垫内部有通孔相互贯通形成第一通孔;所述第一通孔中容置有套管;云台支座上对应第一通孔的位置开设有第二通孔;第二通孔的孔径尺寸小于套管的孔径尺寸;螺栓穿过第二通孔,并延伸出小减震垫外侧,螺栓延伸出小减震垫外侧的部分安装有螺母。
27.进一步,所述套管的上端部设置于云台支座的下表面,下端部设置于小减震垫的通孔内部,套管下端部与小减震垫的通孔底部之间留有形变距离l。
28.进一步,所述形变距离l为2mm
‑
8mm。
29.进一步,减震机构还包括保护罩壳,所述保护罩壳设置有上端面与侧端面,所述上端面安装于螺栓与云台支座之间、将云台支座覆盖;侧端面将大减震垫、轴座、小减震垫、螺母覆盖其内。
30.进一步,大减震垫为圆环形橡胶垫。
31.进一步,小减震垫为圆形橡胶垫。
32.与现有技术相比,本发明的有益效果是:
33.第一、本发明在消防机器人底盘上设计了搭载了水管的卷盘,通过卷盘实现对水管的实时收紧;水管一端连接水箱的进水口,另一端与供水车连接,为水箱加水。加水过程中,机器人仍可不间断工作,实现不间断供水用于机器人消防灭火。
34.第二、卷盘搭载于机器人底盘上,水管长度的调节完全由卷盘转动实现,避免了水管拖地产生摩擦带来的不良影响,减轻了系统的负荷,延长了水管的使用寿命。且由于是通
过水管对水箱供水而非直接对消防水泡供水,可采用小管径的水管,更方便地搭载于卷盘上。
35.第三、本发明设计了自主导航式机器人行走底盘,消防水箱自带消防用水,启动后,机器人通过导航激光雷达进行自主导航,通过云台搭载的摄像仪寻找火源,并通过红外热像仪实时掌握现场状况,找到火源后,可通过遥控装置操纵消防水泡对准火源喷射出消防水进行灭火;行走过程中,机器人可以通过避障激光雷达实现自动避障功能;
36.第四、本发明针对消防机器人的云台设计了由大减震垫与小减震垫组成的双向减震机构,通过螺栓、套管、螺母将云台支座与轴座连接,控制套管的长度使套管下端部与小减震垫的通孔底部之间留有形变距离l,以保证紧固螺母拧紧之后,大减震垫与小减震垫均有少许压缩量,并保留一定的可压缩空间,从而使得系统在上下颠簸或产生侧向弯矩的情况下,大减震垫与小减震垫通过弹性形变,发挥出双向减震的作用,可极大地抵消在不同方向产生的震动。
附图说明
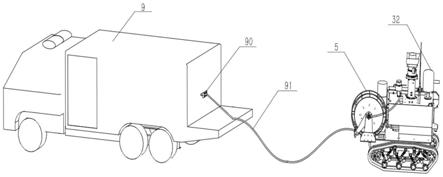
37.图1为本发明的消防灭火机器人系统的结构示意图;
38.图2为消防灭火机器人的正面结构示意图;
39.图3为消防灭火机器人的背面结构示意图;
40.图4为消防灭火机器人的减震机构剖视图。
41.图中:
42.云台1、云台支座101、摄像仪102、红外热像仪103、减震机构2、螺栓202、套管203、大减震垫204、小减震垫205、大垫圈206、螺母208、保护罩壳209、水箱3、高压泵31、消防水泡32、进水口33、底盘4、避障激光雷达401、卷盘5、导航激光雷达6、支撑轴7、轴座701、行进机构8、供水车9、供水接头90、水管91。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.请参阅图1
‑
4,本发明提供一种技术方案,不间断供水消防灭火机器人系统,其包括通过水管91连接的供水车9和消防灭火机器人,所述消防灭火机器人包括底盘4及安装于底盘4上的行进机构8。底盘4上方安装有水箱3、高压泵31、消防水泡32;水箱3上设置有进水口33;底盘4上还安装有用于搭载水管91的卷盘5;卷盘5搭载的水管91首端连接水箱3的进水口33,末端与供水车9的供水接头90连接;卷盘5内设置有卷簧保持水管91收放过程中始终缠绕收紧;所述高压泵31通过管路分别连接水箱3、消防水泡32,水箱3中的水经高压泵31增压后由消防水泡32发射。
45.其包括底盘4及行进机构8,所述行进机构8优选为履带式行进机构,具有较强的适应恶劣环境的能力。
46.水箱3上方与水箱3固定连接有支撑轴7;支撑轴7用于搭载云台1,云台1顶部安装
有摄像仪102、红外热像仪103。
47.底盘4上还安装有避障激光雷达401。水箱3上方安装有导航激光雷达6。启动后,消防机器人通过导航激光雷达进行自主导航,通过云台搭载的摄像仪寻找火源,并通过红外热像仪实时掌握现场状况,找到火源后,可通过遥控装置操纵消防水泡对准火源喷射出消防水进行灭火;行走过程中,机器人可以通过避障激光雷达实现自动避障。
48.水箱3上壳体固定连接有支撑轴7,支撑轴7上设置用于连接其他装置的轴座701。还包括云台1及设置于云台1底部的用于实现云台1与其它装置连接的云台支座101。云台1顶部位置搭载有摄像仪102、红外热像仪103,摄像仪102、红外热像仪103具有较大的重量,因此,云台1与支撑轴7之间需设计合理的减震机构,提高整个设备的使用寿命。具体设置如下:
49.轴座701和云台支座101之间安装有大减震垫204,所述大减震垫204优选为圆环形橡胶垫,圆环的宽度、厚度可根据需要灵活设置。
50.轴座701、云台支座101的圆周上设置有若干连接单元,优选间隔90
°
设置有4个连接单元,保持良好的稳定性。4个连接单元将轴座701、云台支座101、大减震垫204紧固连接,所述连接单元包括小减震垫205、套管203、螺栓202、螺母208。
51.所述小减震垫205安装于轴座701下方,小减震垫205为圆形橡胶垫,小减震垫205与螺母208之间设置有大垫圈206,大垫圈206也优选设置为圆形橡胶垫。云台支座101、大减震垫204、轴座701、小减震垫205内部开设有通孔,螺栓202安装于所述通孔中,螺栓202底部由螺母208锁紧。
52.实施例1:
53.本实施例中,大减震垫204、轴座701、小减震垫205内部有通孔相互贯通形成第一通孔;所述第一通孔中容置有套管203;云台支座101上对应第一通孔的位置开设有第二通孔;第二通孔的孔径尺寸小于套管203的孔径尺寸;螺栓202穿过第二通孔,并延伸出小减震垫205外侧,螺栓202延伸出小减震垫205外侧的部分安装有螺母208。套管203的上端部设置于云台支座101的下表面,下端部设置于小减震垫205的通孔内部,套管203下端部与小减震垫205的通孔底部之间留有形变距离l,形变距离l优选在2mm
‑
8mm之间设置。拧紧螺母208使大垫圈206与套管203下端部接触,大减震垫与小减震垫即达到最大限度压缩量。安装时,通过调整螺母208的锁紧程度,使大减震垫与小减震垫均有少许压缩量,并保留一定的可压缩空间,系统在上下颠簸或产生侧向弯矩的情况下,大减震垫与小减震垫通过弹性形变,发挥出双向减震的作用,将不同方向产生的震动抵消。
54.本实施例减震机构2设置有保护罩壳209,所述保护罩壳209设置有上端面与侧端面,所述上端面安装于螺栓202与云台支座101之间、将云台支座101覆盖;侧端面将大减震垫204、轴座701、小减震垫205、螺母208覆盖其内。通过保护罩壳209,将整个减震机构覆盖其中,起到防火、防水、防尘的作用。
55.实施例2:
56.本实施例中,机器人的水箱中的水位不足时,卷盘5搭载的水管91末端由人工或机械设备牵引,与供水车9的供水接口90连接,由供水车9对水箱进行加水。在加水及机器人移动过程中,通过卷盘始终实现对水管的实时收紧。
57.加水过程中,机器人仍可不间断工作,由于卷盘搭载于机器人上,水管长度的调节
完全由卷盘转动实现,避免了水管拖地产生摩擦带来的不良影响,充满水后,可选择将水管91与供水车9的供水接口分离,在卷盘5内部的卷簧的作用下,水管91自动回收至卷盘5上,继续完成消防工作。
58.本实施例中,卷盘搭载于机器人底盘上,水管长度的调节完全由卷盘转动实现,避免了水管拖地产生摩擦带来的不良影响,减轻了系统的负荷,延长了水管的使用寿命。且由于是通过水管对水箱供水而非直接对消防水泡供水,可采用小管径的水管,更方便地搭载于卷盘5上。
59.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。