1.本发明涉及履带机器人技术领域,尤其涉及一种履带机器人用两轴平台。
背景技术:
2.履带机器人所面临的外部环境是很复杂的,地貌状况更是千差万别,辅助部件为了达到预想的效果,就必须有一个理想的平台来展示,以平台搭载的消防水枪为例,根据设计初衷需要消防水枪水平
‑
60
°
~+60
°
,垂直
‑
10
°
~+85
°
(
±5°
),如果使用安装架,根本无法实现目的,即便使用带有调节功能的平台也是无法到达此要求的。
3.履带机器人搭载的附件千差万别,然最终目标是实现附件与设计要求的完美结合,由于履带机器人所处环境的不同,对应实施的目标以及到达的效果各个不同,因此需要平台具有灵活、牢固、可靠、操作简单、易于维修等特点。
4.但现有的消防水枪的角度无法进行自由旋转,使得面对特殊的任务时,无法进行工作,需要人员手持消防水枪进行工作,进而增加了工人的作业强度以及危险性。
5.因此,有必要提供一种履带机器人用两轴平台解决上述技术问题。
技术实现要素:
6.本发明提供一种履带机器人用两轴平台,解决了现有的消防水枪的角度无法进行自由旋转的问题。
7.为解决上述技术问题,本发明提供的履带机器人用两轴平台,包括:回转支撑轴承固定座,所述回转支撑轴承固定座上转动连接有回转支撑轴承,并且回转支撑轴承固定座上固定安装有自转旋转马达,所述自转旋转马达的输出端固定安装有齿轮,所述回转支撑轴承固定座上固定安装有齿圈外护罩,并且回转支撑轴承固定座的底部固定安装有安装固定板,所述回转支撑轴承的一端固定安装有旋转平台底座,所述旋转平台底座上固定安装有z轴旋转固定装置,并且旋转平台底座上固定安装有z轴旋转马达,所述旋转平台底座的上方设置有z轴旋转装置,所述z轴旋转装置上设置有消防水枪。
8.优选的,所述自转旋转马达的输出端贯穿所述回转支撑轴承固定座的底部且延伸至所述回转支撑轴承固定座的顶部,并且自转旋转马达的输出端与所述回转支撑轴承固定座转动连接。
9.优选的,所述齿轮的表面与所述回转支撑轴承的表面啮合,所述齿圈外护罩套设在所述回转支撑轴承的表面,并且齿圈外护罩与所述回转支撑轴承的表面转动连接。
10.优选的,所述z轴旋转装置位于所述z轴旋转马达和所述z轴旋转固定装置之间,并且z轴旋转装置与所述z轴旋转马达和所述z轴旋转固定装置连接。
11.优选的,所述安装固定板用于将回转支撑轴承固定座安装在车体上,所述安装固定板共设置有两个,两个所述安装固定板对称分布在所述回转支撑轴承固定座的两侧。
12.优选的,所述消防水枪位于所述z轴旋转马达和所述z轴旋转固定装置的中部。
13.优选的,所述z轴旋转装置包括消防水枪固定板,所述消防水枪固定板上固定安装
有消防水枪锁紧板,所述消防水枪固定板上设置有旋转副轴,并且消防水枪固定板上固定安装有主副轴固定板,所述消防水枪锁紧板上设置有马达旋转主轴。
14.优选的,所述旋转平台底座上设置有定位组件,所述定位组件包括安装槽,所述安装槽的内部滑动连接有定位杆,所述定位杆的表面固定安装有安装盘,并且定位杆的表面套设有推动弹簧,所述定位杆的一端转动连接有定位盘,所述定位盘上固定安装有限位杆,所述旋转平台底座上固定安装有限位板,所述限位板的内部开设有滑动槽,并且限位板上开设有限位槽,所述齿圈外护罩上开设有定位槽。
15.优选的,所述安装槽开设于所述旋转平台底座的内部,所述安装盘与所述安装槽的内表面滑动连接,所述推动弹簧位于所述安装盘的下方,所述定位杆的一端与所述定位槽相适配。
16.优选的,所述限位杆位于所述滑动槽的内部,并且限位杆与所述滑动槽的内表面滑动连接,所述限位杆与所述限位槽相适配,所述定位槽共设置有多个,多个所述定位槽均匀分布在所述齿圈外护罩上。
17.与相关技术相比较,本发明提供的履带机器人用两轴平台具有如下有益效果:
18.本发明提供一种履带机器人用两轴平台,本发明通过在洗消机器人上安装两轴平台对特定一些物体进行冲洗,实现对消防水枪进行360
°
无限制旋转,能够适用大多数环境,极大提高了人工效率以及方便程度,减少了工人的作业强度以及危险性。
附图说明
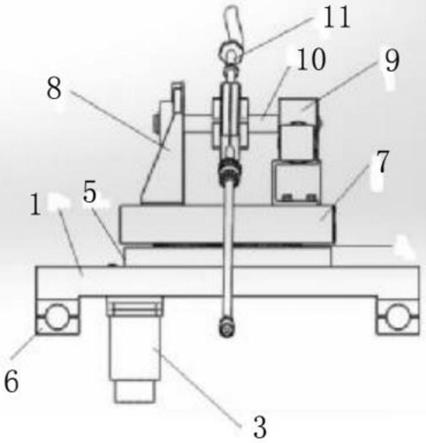
19.图1为本发明提供的履带机器人用两轴平台的第一实施例的结构示意图;
20.图2为图1所示的回转支撑轴承固定座的局部结构立体图;
21.图3为图1所示的z轴旋转装置的立体图;
22.图4为本发明提供的履带机器人用两轴平台的第二实施例的结构示意图;
23.图5为图4所示的旋转平台底座的剖视图。
24.图中标号:1、回转支撑轴承固定座,2、回转支撑轴承,3、自转旋转马达,4、齿轮,5、齿圈外护罩,6、安装固定板,7、旋转平台底座,8、z轴旋转固定装置,9、z轴旋转马达,10、z轴旋转装置,101、消防水枪固定板,102、消防水枪锁紧板,103、旋转副轴,104、主副轴固定板,105、马达旋转主轴,11、消防水枪,12、定位组件,121、安装槽,122、定位杆,123、安装盘,124、推动弹簧,125、定位盘,126、限位杆,127、限位板,128、滑动槽,129、限位槽,130、定位槽。
具体实施方式
25.下面结合附图和实施方式对本发明作进一步说明。
26.第一实施例
27.请结合参阅图1、图2、图3,其中,图1为本发明提供的履带机器人用两轴平台的第一实施例的结构示意图;图2为图1所示的回转支撑轴承固定座的局部结构立体图;图3为图1所示的z轴旋转装置的立体图。一种履带机器人用两轴平台包括:回转支撑轴承固定座1,所述回转支撑轴承固定座1上转动连接有回转支撑轴承2,并且回转支撑轴承固定座1上固定安装有自转旋转马达3,所述自转旋转马达3的输出端固定安装有齿轮4,所述回转支撑轴
承固定座1上固定安装有齿圈外护罩5,并且回转支撑轴承固定座1的底部固定安装有安装固定板6,所述回转支撑轴承2的一端固定安装有旋转平台底座7,所述旋转平台底座7上固定安装有z轴旋转固定装置8,并且旋转平台底座7上固定安装有z轴旋转马达9,所述旋转平台底座7的上方设置有z轴旋转装置10,所述z轴旋转装置10上设置有消防水枪11。
28.对消防水枪11、自转旋转马达3和z轴旋转马达9可以采用plc系统进行控制,使得消防水枪11旋转至指定的角度后可以自动工作。
29.所述自转旋转马达3的输出端贯穿所述回转支撑轴承固定座1的底部且延伸至所述回转支撑轴承固定座1的顶部,并且自转旋转马达3的输出端与所述回转支撑轴承固定座1转动连接。
30.由外接电源为自转旋转马达3和z轴旋转马达9提供电源,并且外接电源与自转旋转马达3和z轴旋转马达9之间设置有控制开关。
31.所述齿轮4的表面与所述回转支撑轴承2的表面啮合,所述齿圈外护罩5套设在所述回转支撑轴承2的表面,并且齿圈外护罩5与所述回转支撑轴承2的表面转动连接。
32.齿轮4旋转会带动回转支撑轴承2同步转动。
33.所述z轴旋转装置10位于所述z轴旋转马达9和所述z轴旋转固定装置8之间,并且z轴旋转装置10与所述z轴旋转马达9和所述z轴旋转固定装置8连接。
34.本发明的冲洗阀开启后不但能够将冲洗水流排除,还能加大对物体表面的水流冲刷力度,将在制水过程中在反渗透膜表面产生的有可能沉积再物体表面污渍冲洗下来并排出,从而进一步延长物体的表面美观以及使用寿命。
35.所述安装固定板6用于将回转支撑轴承固定座1安装在车体上,所述安装固定板6共设置有两个,两个所述安装固定板6对称分布在所述回转支撑轴承固定座1的两侧。
36.所述消防水枪11位于所述z轴旋转马达9和所述z轴旋转固定装置的中部。
37.z轴旋转固定装置8采用和我们所接触的一般的有所不同,采用的是两段夹紧式连接,安装时保证两个旋转轴在同一条直线上。
38.消防水枪11为高压水枪安装时必须锁紧,否则所产生的冲击力可以会造成一些不必要的损失。消防水枪还包括加压装置,加压装置的进口和出口分别连通水源管和消防水枪。
39.z轴旋转装置10一端链接z轴旋转马达9,一端链接z轴旋转固定装置8。z轴旋转装置10一端稍小0.5mm保证z轴旋转装置10在z轴旋转固定装置8中自由灵活旋转
40.z轴旋转马达9为中空轴马达,z轴旋转固定装置8插入锁紧后进行旋转
41.自转旋转马达3安装在回转支撑轴承固定座上装配正齿轮与回转支撑轴承相配合带动其与旋转平台底座旋转。
42.回转支撑轴承底部与回转支撑轴承固定座配合上部分与旋转平台底座配合,进行动作。
43.所述z轴旋转装置10包括消防水枪固定板101,所述消防水枪固定板101上固定安装有消防水枪锁紧板102,所述消防水枪固定板101上设置有旋转副轴103,并且消防水枪固定板101上固定安装有主副轴固定板104,所述消防水枪锁紧板102上设置有马达旋转主轴105。
44.马达旋转主轴105与旋转副轴103均为方轴(一端为圆形,一端为方形的一种轴)卡
入主副轴固定板104的一个凹槽中紧密配合,马达旋转主轴105与旋转副轴103的方形凸台略高于主副轴固定板104的凹槽使得安装时整个旋转机构紧密配合不会晃动,主副轴固定,104再连接上消防水枪固定板101与消防水枪锁紧板102,消防水枪固定,101与消防水枪锁紧板102中间夹住消防水枪,消防水枪固定板101与消防水枪锁紧板102互相锁紧,形成整个装置。
45.本发明提供的履带机器人用两轴平台的工作原理如下:
46.由控制开关控制自转旋转马达3的输出端旋转,自转旋转马达3的输出端旋转齿轮4旋转,齿轮4旋转会带动回转支撑轴承2旋转,回转支撑轴承2旋转会带动旋转平台底座7旋转,旋转平台底座7旋转合适的位置后,控制自转旋转马达3的输出端不再转动,然后由控制开关控制z轴旋转马达9的输出端旋转,z轴旋转马达9的输出端旋转会带动z轴旋转固定装置8旋转,z轴旋转固定装置8旋转会带动消防水枪11旋转,当消防水枪11旋转到指定位置后,由控制开关控制消防水枪11开始工作。
47.与相关技术相比较,本发明提供的履带机器人用两轴平台具有如下有益效果:
48.本发明通过在洗消机器人上安装两轴平台对特定一些物体进行冲洗,实现对消防水枪11进行360
°
无限制旋转,能够适用大多数环境,极大提高了人工效率以及方便程度,减少了工人的作业强度以及危险性。
49.第二实施例
50.请参阅图3和图5,基于本技术的第一实施例提供的一种履带机器人用两轴平台,本技术的第二实施例提出另一种履带机器人用两轴平台。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
51.具体的,本技术的第二实施例提供的履带机器人用两轴平台的不同之处在于,履带机器人用两轴平台,所述旋转平台底座7上设置有定位组件12,所述定位组件12包括安装槽121,所述安装槽121的内部滑动连接有定位杆122,所述定位杆122的表面固定安装有安装盘123,并且定位杆122的表面套设有推动弹簧124,所述定位杆122的一端转动连接有定位盘125,所述定位盘125上固定安装有限位杆126,所述旋转平台底座7上固定安装有限位板127,所述限位板127的内部开设有滑动槽128,并且限位板127上开设有限位槽129,所述齿圈外护罩5上开设有定位槽130。
52.所述安装槽121开设于所述旋转平台底座7的内部,所述安装盘123与所述安装槽121的内表面滑动连接,所述推动弹簧124位于所述安装盘123的下方,所述定位杆122的一端与所述定位槽130相适配。
53.推动弹簧124是对安装盘123进行推动,当限位杆126与限位槽129不再卡接时,由推动弹簧124推动定位杆122。
54.所述限位杆126位于所述滑动槽128的内部,并且限位杆126与所述滑动槽128的内表面滑动连接,所述限位杆126与所述限位槽129相适配,所述定位槽130共设置有多个,多个所述定位槽130均匀分布在所述齿圈外护罩5上。
55.多个定位槽130可以对转动不同角度的旋转平台底座7进行定位,下午呢杆126与限位槽129卡接是对移动后的定位盘125进行定位。
56.工作原理:
57.当需要对转动后的旋转平台底座7进行定位时,向下推动定位盘125,定位盘125向
下移动会带动限位杆126向下移动,当限位杆126移动至限位槽129的一侧时,旋转定位盘125,定位盘125旋转会带动限位杆126旋转,限位杆126旋转会使得限位杆126进入限位槽129的内部,进而可以完成对移动后定位盘125的顶部,并且定位盘125向下移动会带动定位杆122向下移动,定位杆122向下移动会使得定位杆122进入定位槽130的内部,从而可以完成对旋转平台底座7的顶部。
58.有益效果:
59.通过推动定位盘125,使得定位盘125带动定位杆122向下移动,定位杆122向下移动会使得定位杆122与定位槽130卡接,进而可以对旋转平台底座7进行定位,并且定位杆122移动至定位槽130的内部后旋转定位盘125,使得定位盘125带动限位杆126进入限位槽129的内部,进而完成对移动后定位杆122的顶部,避免了消防水枪11运行时,需要旋转平台底座7的稳定性较差,容易出现晃动的现象。
60.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。