1.本实用新型涉及一种自动板材上料机,特别涉及应用于冲压机床的板材自动上料装置,属于冲压自动化技术领域。
背景技术:
2.目前,在冲压机床生产时,板材加工需要先通过工作人员搬运板材,再送往加工位置进行加工,工作效率低,并极易造成工作人员受伤。
3.中国专利文献cn213763790u公开了一种双工位冲压自动上料机,用于解决现有的上料机效率低且不具有矫平功能的问题。该上料机的机架自前端向后端依次设置上料操作台、矫平辊组件和转运操作台,并在所述上料操作台两侧分别放置一个料仓,用一备一,上料操作台中的双自由度机械手ⅰ自任一料仓中抓取原料板并搬运至皮带输送机构ⅰ的皮带上;所述转运操作台中的双自由度机械手ⅱ自皮带输送机构ⅱ上抓取原料板并搬运至冲压模;并在所述上料操作台和转运操作台之间设置矫平辊组件。用于钣金冲压线钣金原料的自动上料,设有两个料仓,一个工作时,另一个可以人工填加料堆。并通过在该上料机中增设矫平辊组件进一步地对原料板进行二次矫平,避免原料板出现缺陷。
4.该方案提供了两个工位交替上料,虽然提高了工作效率,但仍然需要人工操作,一个工作时,另一个可以人工填加料堆,并没有实现全自动化作业。基于此,本实用新型提出一种自动化的板材上料装置,以减轻工人劳动强度,改善工人劳动条件,减少生产中事故的发生率,进而辅助实现冲床加工的全自动化生产、无人化作业。
技术实现要素:
5.针对现有技术的不足,本实用新型提供一种自动板材上料机,该自动板材上料机可以实现自动移位、自动升降、自动抓取和释放板材,最终实现板材的自动上料。
6.本实用新型的技术方案如下:
7.一种自动板材上料机,包括支架、平移装置、升降装置和吸料装置,平移装置设置在支架上,升降装置安装在平移装置上,升降装置的底部连接所述的吸料装置;
8.平移装置包括电动推杆、滑块和第一固定板,滑块连接在第一固定板的底部,且滑块安装在支架的导轨上,电动推杆的活塞杆端头与第一固定板的底部连接;
9.升降装置包括电机、丝杠、升降杆、滑板和第二固定板,电机设置在第一固定板的上表面,电机的输出轴与丝杠传动连接,丝杠与滑板中心螺纹连接,升降杆的上下两端分别连接滑板和第二固定板;
10.吸料装置包括吸盘和缓冲板,多个吸盘安装在缓冲板的底部组成吸盘矩阵,缓冲板与第二固定板连接。
11.优选的,所述支架包括两根横杆、两根连接杆和四根竖杆,四根竖杆安装在两根横杆的底部,两根横杆平行设置并通过两根连接杆固定连接。
12.优选的,所述两根横杆的上表面设置所述的导轨,滑块与导轨配合连接。
13.优选的,所述导轨的末端设置有后传感器。
14.优选的,所述滑板的中心设置有螺纹套筒,丝杠贯穿螺纹套筒并与螺纹套筒螺纹连接。
15.优选的,所述升降杆的数量为四根,四根升降杆对称设置在滑板的四个边角位,四根升降杆的顶端与滑板固定连接,底端穿过第一固定板后与第二固定板连接。
16.优选的,所述第一固定板的两侧对称设置支撑板,支撑板的顶端通过顶板连接,顶板的中心设置有轴承,丝杠的顶端与轴承内圈固定连接。
17.优选的,所述两侧支撑板之间还连接有一导向板,四根升降杆贯穿导向板。此设计的好处是,导向板可以增加升降杆上下起落过程中的稳定性,避免升降杆发生偏移。
18.优选的,所述两侧支撑板上对称设置有下限位传感器和上限位传感器,滑板上设置有限位器。此设计的好处是,升降杆上下起落过程中,通过限位器与下限位传感器或上限位传感器的触碰,可以保证升降杆的起落在合理的行程范围内。
19.优选的,所述缓冲板与第二固定板之间通过弹簧连接。
20.优选的,所述吸盘与外部真空发生器通过软管连接。
21.优选的,所述上料机还包括主要由plc组成的控制系统,电机、电动推杆、下限位传感器、上限位传感器、后传感器和真空发生器分别与plc连接。此设计的好处在于,控制系统主要以可编程控制器(plc)为核心组成,所有动作均在plc控制下完成。
22.本实用新型的技术特点和有益效果:
23.1、本实用新型板材自动上料机设计科学,结构合理,操作简单,无需人工,大大节省了人力物力,提高了作业安全,同时大大提高了工作效率。
24.2、本实用新型板材自动上料机采用吸盘矩阵的设计,利用负压原理对板材进行抓取和释放,避免传统的刚性机械手的硬抓取,从而避免了对板材的损伤。
25.3、本实用新型板材自动上料机利用丝杠和电动推杆的结构设计,实现自动升降和前后移动,造价成本低,运行高效。
26.4、本实用新型板材自动上料机利用plc控制器,整个装置的移动过程中采用plc内部程序运行,实现自动化和智能化的运作,替代了传统的人工上料和半自动化上料,升级了上料工序。
附图说明
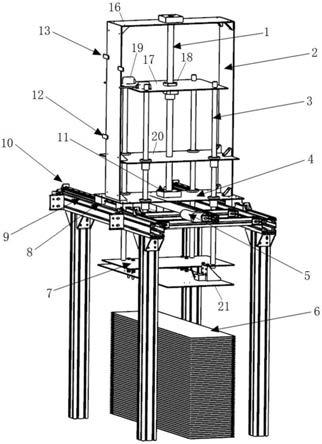
27.图1为本实用新型上料机的结构示意图;
28.图2为本实用新型上料机的仰视图;
29.图3为本实用新型上料机的立体图;
30.图4为图3中a部分的放大图;
31.图5为本实用新型上料机的背面视图;
32.图6为图5中b部分的放大图;
33.图中:1-丝杠,2-支撑板,3-升降杆,4-第一固定板,5-电动推杆,6-板材,7-第二固定板,8-滑块,9-导轨,10-后传感器,11-电机,12-下限位传感器,13-上限位传感器,14-弹簧,15-吸盘,16-顶板,17-滑板,18-螺纹套筒,19-限位器,20-导向板,21-缓冲板。
具体实施方式
34.下面通过实施例并结合附图对本实用新型做进一步说明,但不限于此。
35.实施例1:
36.如图1-6所示,本实施例提供一种自动板材上料机,包括支架、平移装置、升降装置和吸料装置,平移装置设置在支架上,升降装置安装在平移装置上,升降装置的底部连接所述的吸料装置;
37.平移装置包括电动推杆5、滑块8和第一固定板4,滑块8连接在第一固定板4的底部,且滑块8安装在支架的导轨9上,电动推杆5的活塞杆端头与第一固定板4的底部连接;
38.升降装置包括电机11、丝杠1、升降杆3、滑板17和第二固定板7,电机11设置在第一固定板4的上表面,电机11的输出轴与丝杠1传动连接,丝杠1与滑板17中心螺纹连接,升降杆3的上下两端分别连接滑板17和第二固定板7;
39.吸料装置包括吸盘15和缓冲板21,多个吸盘15安装在缓冲板21的底部组成吸盘矩阵,缓冲板21与第二固定板7连接。
40.具体而言,支架为一框架结构,采用方钢通过螺栓连接而成,其包括两根横杆、两根连接杆和四根竖杆,四根竖杆安装在两根横杆的底部,两根横杆平行设置并通过两根连接杆固定连接。
41.两根横杆的上表面设置所述的导轨9,导轨9为凸字型导轨,滑块8为凹字型滑块,滑块8与导轨9配合连接,可使滑块8在导轨9上前后移动,凹凸配合则能使滑块8在滑移过程中保持稳定性。导轨9的末端设置有后传感器10,是获取滑块8移动到工作位的位置传感器。
42.电动推杆5的缸筒一端通过螺栓安装在两根横杆之间的连接杆上,电动推杆5的活塞杆端头与第一固定板4的底部连接,第一固定板4的四个边角通过螺栓与滑块8固定连接。
43.滑板17、第一固定板4、第二固定板7及缓冲板21均为长方形钢板,具有一定的刚性,不易发生形变,保证滑板17、第二固定板7和缓冲板21升降过程中的一致性。
44.滑板17的中心设置有螺纹套筒18,螺纹套筒18与滑板17焊接,丝杠1贯穿螺纹套筒18并与螺纹套筒18螺纹连接,通过丝杠1和螺纹套筒18之间的旋转运动转化为升降杆3的上下移动。
45.升降杆3的数量为四根,四根升降杆3对称设置在滑板的四个边角位,四根升降杆3的顶端与滑板17固定连接,底端穿过第一固定板4后与第二固定板7固定连接。
46.第一固定板4的两侧对称设置支撑板2,支撑板2的顶端通过顶板16连接,顶板16的中心设置有轴承,丝杠1的顶端与轴承内圈固定连接。
47.两侧支撑板2上对称设置有下限位传感器12和上限位传感器13,滑板17上设置有限位器19。升降杆上下起落过程中,通过限位器与下限位传感器或上限位传感器的触碰,可以保证升降杆的起落在合理的行程范围内。
48.吸盘15与外部真空发生器通过软管连接,通过真空发生器使吸盘产生负压,从而吸起板材。
49.上料机还包括主要由plc组成的控制系统,电机11、电动推杆5、下限位传感器12、上限位传感器13、后传感器10和真空发生器分别与plc连接。控制系统主要以可编程控制器(plc)为核心组成,所有动作均在plc控制下完成。
50.本实施例技术方案,利用plc控制器,可以实现自动上料机的自动化操作,整个过
程无需人工参与,并可大大提高工作效率。
51.实施例2:
52.一种自动板材上料机,结构如实施例1所述,其不同之处在于:两侧支撑板2之间还连接有一导向板20,导向板20通过螺栓与两侧支撑板2固连,四根升降杆3贯穿导向板20。导向板20可以增加升降杆3上下起落过程中的稳定性,避免升降杆发生偏移。
53.实施例3:
54.一种自动板材上料机,结构如实施例1所述,其不同之处在于:缓冲板21与第二固定板7之间通过弹簧14连接,在缓冲板和第二固定板的四个角位连接处各设置有一对弹簧。当吸盘与板材接触时,可以有一个力量上的缓冲,避免下降的力量过大损坏吸盘。
55.实施例4:
56.一种自动板材上料机的工作方法,利用实施例3所述的技术方案,事先将板材放置在支架中间,然后启动上料机,工作过程包括以下步骤:
57.1)初始工作位,缓冲板21正好位于板材6放置位的正上方,在plc控制下,电机11启动,丝杠1旋转,升降杆3下落,带动第二固定板7和缓冲板21下落,直到吸盘15接触板材6;此时电机11暂停作业;
58.2)真空发生器作业,使吸盘15产生负压,吸起板材6;吸盘矩阵大面积接触板材6,保证板材6吸附的稳定性;
59.3)电机11反转,升降杆3升起,带动第二固定板7和缓冲板21升起,吊起板材6;
60.4)电动推杆5作业,电动推杆5推动第一固定板4,使滑块8移向导轨9末端,滑块8触碰后传感器10后停止移动,即电动推杆5停止作业;
61.5)电机11再次启动,升降杆3下落,带动第二固定板7和缓冲板21下落;
62.6)真空发生器停止作业,吸盘15释放板材6,使板材6降落到待加工位处;
63.7)电机11反转,使丝杠1旋转,升降杆3升起,带动第二固定板7和缓冲板21升起;
64.8)电动推杆5缩回,回到初始工作位;
65.9)重复步骤1)-8),完成多个板材的自动上料。
66.以上所述,仅为本实用新型的具体实施方式,本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。