1.本实用新型涉及输送装置领域,具体为一种环形磁浮多动子输送系统。
背景技术:
2.传统的输送系统,一般是基于皮带,齿形带,链条等传动方式实,依靠伺服电机或者步进电机来提供动力。这种输送系统多是通过外部机械设备来实现载盘的定位和换向等操作。
3.传统的输送系的问题:
4.1、传统输送系统上所有载盘均由同一驱动器驱动,所有载盘只能同速度运行,同进同出,运行轨迹单一,每个载盘无法独立运动、精准控制。
5.2、传统输送系统启停响应慢,定位精度不足,需要单独的停车机构。
6.3、传统输送系统结构繁琐,通用性差无法重复利用,且传动机构属于直接摩擦,维护成本高。
7.4、传统输送系统路径单一(一般是直线),难以适配复杂的流水线,且载盘移动路径有上限,无法离开其所在的区域跨到另一个传统输送系统的区域内,当需要跨区域移动时,必须要借助其他转移装置,将工件从当前载盘转移到另一输送系统的载盘上。
技术实现要素:
8.本实用新型的目的是为了提供一种环形磁浮多动子输送系统,本实用新型通过将驱动模组整合形成直线模组和异形模组,使得直线/异形模组通过对接组件实现拼接,拼接后的输送系统可以适配复杂的流水线,使单个动子可以携带工件从起点一直移动至终点,无需其他转移装置进行转移。
9.为了实现上述发明目的,本实用新型采用了以下技术方案:一种环形磁浮多动子输送系统,包括动子和驱动模组,所述驱动模组分为直线模组和异形模组,所述直线模组和异形模组共同组成封闭环形的驱动模组,所述动子在驱动模组上循环移动,相邻驱动模组之间设置有对接组件;直线模组用于动子直线移动;异形模组用于调整动子移动角度以对准相邻的直线模组/异形模组;对接组件用于连接相邻的驱动模组;驱动模组用于产生活动的磁场驱动动子沿驱动模组活动。
10.与现有技术相比,采用了上述技术方案的环形磁浮多动子输送系统,具有如下有益效果:
11.一、通过增加动子在驱动模组上的数量达到对数量较大的货物达到较快的搬运效果,且各个动子均由不同的驱动模组上的位置检测装置配合线圈控制,定位精度高,加减速平稳,最高运行速度5m/s,效率相较于传统输送模式较高。
12.动子可以在多个驱动模组上进行移动,可以从输送系统的起点一直移动到终点位置,中间无需机械臂或其他装置对动子上的工件进行转移。
13.二、在本专利中,由于驱动模组模块化,可以预先在工厂内将驱动模组拼装完成,
即将线圈、位置检测装置、导轨等直接都安装到基座上,优先将驱动模组预先组装完成后等待使用,现场安装时,仅需要根据施工实际长度,适应性的挑选对应数量的驱动模组即可。
14.增设有对接组件,对多个驱动模组进行快速对接,降低了驱动模组对接的难度,让使用者可以快速上手完成对接,投入生产,更加的高线便捷。
15.三、驱动模组分为异形模组和直线模组,使得两种路径的模组可以任意拼接,形成各个形状及长度的循环线,来适配不同用户流水线的加工需求。
16.四、位置检测装置与线圈分开安装,且位置检测装置外周设置有防护罩,最大限度的减少了信号干扰问题,提高位置检测的感应精度,提高了设备稳定性。
17.优选的,所述驱动模组包括基座、导向机构、驱动电路和线圈,动子包括有永磁体;导向机构用于引导和限定动子移动的方向,所述导向机构设置于基座上表面;线圈设置于基座内,驱动电路控制线圈产生活动的交变磁场,作用于动子的永磁体带动动子活动。
18.优选的,所述驱动模组还包括位置检测装置组件,所述位置检测装置组件包括位置检测装置和防护罩,所述位置检测装置设置于基座内,所述位置检测装置用于感应动子以判断动子的位置,最终反馈动子运动状态。
19.位置检测装置主要用于判断动子位置,因此位置检测装置可以使用光栅、磁栅、红外感应器、微动开关接触等方式去感应动子位置,其中优选,所述位置检测装置包括以下一种或多种元器件的组合:霍尔传感器、磁阻传感器、磁栅传感器。
20.优选的,所述导向机构包括导轨,所述导轨组合形成闭环,动子在导轨上移动,所述导轨两侧设置有延伸部,所述延伸部用于固定动子在导轨上运动的状态。
21.优选的,所述对接组件包括对接板,所述对接板用于将相邻驱动模组固定连接,所述对接板设置有多个固定孔,所述驱动模组两端上设有螺纹孔,固定孔与螺纹孔通过螺丝连接。
22.优选的,所述驱动模组上表面设置有放置槽,所述螺纹孔设置于放置槽内,所述对接板可嵌入放置槽。
23.优选的,所述异形模组呈弧形。
24.优选的,所述异形模组为1/4圆的弧形。
附图说明
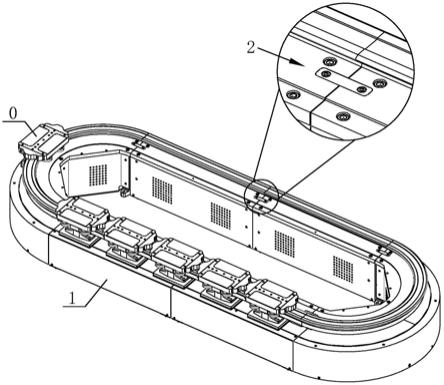
25.图1为本实用新型环形磁浮多动子输送系统实施例1的结构示意图。
26.图2为实施例1中异形模组的结构示意图。
27.图3为实施例1中异形模组的结构示意图。
28.图4为实施例1中直线模组的结构示意图。
29.图5为实施例1中位置检测装置组件的结构示意图。
30.图6为实施例2中异形模组的结构示意图。
31.图7为实施例2中环形磁浮多动子输送系统的结构示意图。
32.附图标记:0、动子;1、驱动模组;10、基座;11、导向机构;110、延伸部;12、线圈;13、位置检测装置组件;130、位置检测装置;131、防护罩;14、放置槽;140、螺纹孔;15、驱动电路;2、对接组件;20、对接板。
具体实施方式
33.下面结合附图对本实用新型做进一步描述。
34.实施例1:
35.如图1至5所示的环形磁浮多动子输送系统,包括动子0和驱动模组1,所述驱动模组1包括直线模组和异形模组,所述驱动模组1组合形成闭环,所述动子0在驱动模组1上移动,相邻驱动模组1之间设置有对接组件2。
36.驱动模组1包括基座10、导向机构11、驱动电路15和线圈12,所述导向机构11用于引导和限定动子0移动的方向,所述导向机构11设置于基座10上表面,线圈12设置于基座10内。
37.参见图4,导向机构11包括导轨,所述导轨组合形成闭环,动子0在导轨上移动,所述导轨两侧设置有延伸部110,所述延伸部110用于固定动子0在导轨上运动的状态。
38.参见图2和图3,对接组件2包括对接板20,所述对接板20用于将相邻驱动模组1固定连接,所述对接板20设置有多个固定孔200,所述驱动模组1两端上设有螺纹孔140,固定孔200与螺纹孔140通过螺丝连接,驱动模组1上表面设置有放置槽14,所述螺纹孔140设置于放置槽14内,所述对接板20可嵌入放置槽14。
39.参见图5,驱动模组1还包括位置检测装置组件13,所述位置检测装置组件13包括位置检测装置130和防护罩131,所述位置检测装置130设置于基座10内,所述位置检测装置130用于感应动子0的磁场信号以判断动子0的位置,最终反馈动子0运动状态,所述位置检测装置130外侧设置有防护罩131,所述防护罩131用于避免位置检测装置130受到线圈12的磁信号干扰。
40.在本实施例中,异形模组采用呈半圆形,与直线模组配合,直线模组和异形模组共同组成封闭跑道型的驱动模组1,适用于大部分生产流水线的往复运送需求。
41.实施例2:
42.参见图6和图7,在本实施例中异形模组采用呈1/4圆的弧形,该异形模组搭配直线模组,可以有更多种运送路线的组合,对于运送路线较为复杂的流水线,可以通过适当的调整方向,实现横竖多方向的工件运送。
43.以上所述是本实用新型的优选实施方式,对于本领域的普通技术人员来说不脱离本实用新型原理的前提下,还可以做出若干变型和改进,这些也应视为本实用新型的保护范围。