1.本发明涉及自动化设备技术领域,尤其是指一种基于视觉识别堆垛机货位的装置及其方法。
背景技术:
2.随着我国经济的持续快速发展,工业、物流、零售、电商等行业规模不断扩大。堆垛机作为智能立体仓库的主要组成部分,其市场发展也在持续向好,其主要作用是在立体仓库的通道内来回运行,将位于巷道口的货物存入货架的货格,或者取出货格内的货物运送到巷道口。为了增加效率,需要实时对货位进行监测。
3.目前立体仓储的存储货位的位置测量主要有人工测量、光电测量和工业智能相机配合定位孔测量;人工测量工作量大,精度没有保障,且风险较大;光电测量的范围较小,有一定的局限性,不能识别所有货架;工业智能相机测量工作量大,且成本较高。
4.因此,有必要设计一种基于视觉识别堆垛机货位的装置及其方法,解决以上的问题。
技术实现要素:
5.为此,本发明所要解决的技术问题在于克服现有技术堆垛机货位测量中现有的安全风险,施工周期长,误差大和成本高等问题。
6.为解决上述技术问题,本发明提供了一种基于视觉识别堆垛机货位的装置,包括:
7.识别部,所述识别部包括智能相机和相机底座,所述智能相机与相机底座连接;
8.支撑部,所述支撑部包括连接件、水平滑块、导轨、垂直滑块和垂直立柱,所述相机底座活动连接在所述连接件上,所述连接件通过水平滑块沿导轨的延伸方向滑动,所述导轨设置在垂直滑块上,所述垂直滑块沿所述垂直立柱的延伸方向滑动。
9.调整部,包括支撑所述垂直立柱的套筒和夹持在所述货叉上的夹持底座。
10.在本发明的一个实施例中,所述相机底座与连接件配合处设置有连接孔和用于调整角度的环形孔。
11.在本发明的一个实施例中,所述夹持底座包括第一夹持板和第二夹持板,所述第一夹持板与第二夹持板之间设置有用于调整的通孔。
12.在本发明的一个实施例中,所述第二夹持底座上穿设有手把,所述手把的一端设置有顶片。
13.在本发明的一个实施例中,所述水平滑块顶部设置有用于固定的滚花螺钉。
14.一种基于视觉识别堆垛机货位的装置,还包括货架;所述货架包括横梁、支柱和托盘;所述横梁和支柱的交点为柱点;所述视觉识别堆垛机货位的方法包括以下步骤:
15.(1)建立所述货架数学结构模型,将所述柱点坐标与实际坐标建立对应关系;
16.(2)标定所述货架数学模型和所述堆垛机坐标的偏移量,建立所述货架坐标与所述堆垛机坐标的计算关系;
17.(3)所述货架设置有货架特征点,调整所述智能相机并标定所述货架特征点,调整堆垛机至相邻坐标并识别特征点,智能相机对比并记录偏差;
18.(4)重复步骤(3)识别所有柱点偏差并记录;
19.(5)根据托盘宽度,横梁高度,托盘间距以及立柱的宽度,结合柱点的实际坐标,计算托盘的坐标。
20.在本发明的一个实施例中,所述货架数学结构模型的建立需要以下步骤:首先建立数学坐标系,x轴和y轴,所述x轴的坐标即立柱,所述y轴的坐标即横梁,所述x轴与y轴的焦点坐标p(x,y)即柱点坐标;将柱点实际的位置与数学坐标相对应。
21.在本发明的一个实施例中,所述堆垛机坐标的实际坐标的建立需要以下步骤:首先调整货叉中心与柱点p所对应的立柱中心一致,调整货叉移动到托盘位置,记录当前堆垛机坐标o,最后建立堆垛机实际坐标系m与货架坐标的关系。
22.在本发明的一个实施例中,所述货架特征点偏差记录的步骤:在所述当前堆垛机坐标o的位置,调整智能相机可以识别货架的特征点中心,与初始位置标定的图片特征点中心对比,计算偏差dis并记录,重复步骤,在集合q中记录所有柱点的偏差。
23.在本发明的一个实施例中,所述托盘坐标确定的步骤:所述托盘的宽度w1、横梁的高度h、托盘的间距为d以及立柱的宽度w2为固定值,结合相邻两个柱点的实际坐标,根据公式计算出托盘的位置坐标;所述托盘位置在两个立柱之前,通过计算若两个立柱的间距只能放置一个托盘,则托盘的位置在两个立柱的中心。
24.本发明的上述技术方案相比现有技术具有以下优点:
25.本发明所述的一种基于视觉识别堆垛机货位的装置及其方法,在测量堆垛机货位的过程中,降低测量人员的安全风险;提高立体仓库堆垛机的测量效率;提高了立体仓库堆垛机的测量精度。
附图说明
26.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
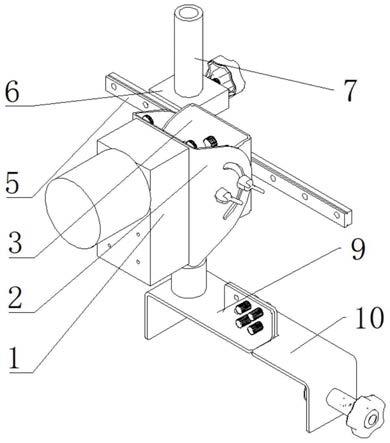
27.图1是本发明的结构示意图;
28.图2是本发明的结构左视图;
29.图3是本发明的货架结构示意图;
30.图4是本发明的数学模型图;
31.图5是本发明的货架局部示意图;
32.说明书附图标记说明:1、智能相机;2、相机底座;3、连接件;4、水平滑块;5、导轨;6、垂直滑块;7、立柱;8、套筒;9、第一夹持板;10、第二夹持板;11、手把;12、顶片;13、横梁;14、支柱;15、托盘。
具体实施方式
33.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
34.参照图1所示,本发明的结构示意图,包括:识别部、支撑部和调整部,识别部包括
智能相机1和相机底座2,智能相机1与相机底座2连接;支撑部包括连接件3、水平滑块4、导轨5、垂直滑块6和垂直立柱7,相机底座2活动连接在所述连接件3上,连接件3通过水平滑块4沿导轨5的延伸方向滑动,导轨5设置在垂直滑块6上,垂直滑块6沿垂直立柱7的延伸方向滑动。调整部包括支撑所述垂直立柱7的套筒8和夹持在所述货叉上的夹持底座。
35.可以看出,智能相机1通过连接件3与水平滑块4连接,可以在导轨5上移动,调整智能相机1的水平位置;导轨5一端又与垂直滑块6连接,控制智能相机1垂直方向的位置调整;智能相机1能够在水平和垂直位置上精准定位,并且底部能够与货叉之间灵活配合。
36.具体的,相机底座2与连接件3配合处设置有连接孔和用于调整角度的环形孔,设置两组孔,其中连接孔将两者枢轴连接,环形孔用于智能相机1的微调,优选的,采用蝶形螺母连接和锁紧,方便拆卸和固定。
37.具体的,夹持底座包括第一夹持板9和第二夹持板10,第一夹持板9与第二夹持板10之间设置有用于调整的通孔,夹持底座由两部分组成,在连接处折弯通过螺栓连接固定,一方面提高了整个夹持底座的刚性,同时加大了加持底座的可调整范围。
38.具体的,第二夹持底座上穿设有手把11,手把11的一端设置有顶片12,手把11的一端加设一个顶片12,能够让调整座更稳定的与货叉固定。
39.具体的,水平滑块4顶部设置有用于固定的滚花螺钉,滚花螺钉可以控制水平滑块4与导轨5之间的移动,将水平滑块4固定在合适的位置。
40.进一步的,本发明所配套的检测方法具体如下:
41.一种基于视觉识别堆垛机货位的装置,还包括货架;其中货架包括横梁13、支柱14和托盘15;横梁13和支柱14的交点为柱点;视觉识别堆垛机货位的方法包括以下步骤:
42.(1)建立所述货架数学结构模型,将柱点坐标与实际坐标建立对应关系;如图3所示,货架数学结构模型的建立需要以下步骤:首先建立数学坐标系,x轴和y轴,x轴的坐标即立柱7,y轴的坐标即横梁13,x轴与y轴的焦点坐标p(x,y)即柱点坐标;将柱点实际的位置与数学坐标相对应;通过实施例具体描述,p(0,0)所对应的实际坐标值[0,916],p(5,3)所对应的实际坐标值为[11220,7666]。
[0043]
(2)标定货架数学模型和堆垛机坐标的偏移量,建立货架坐标与堆垛机坐标的计算关系;堆垛机坐标的实际坐标的建立需要以下步骤:首先调整货叉中心与柱点p所对应的立柱7中心一致,调整货叉移动到托盘15位置,记录当前堆垛机坐标o,最后建立堆垛机实际坐标系m与货架坐标的关系;通过实施例具体体现,当前堆垛机坐标o(offsetx,offsety),其中offsetx即堆垛机行走的水平距离,offsety即堆垛机升降距离,可以得出货架坐标与堆垛机坐标的一个关系式,对于p(0,0)这个点,即:
[0044]
p(0,0).x=m(0,0)x+offsetx p(0,0).y=m(0,0).y+offsety
[0045]
(3)货架设置有货架特征点,调整智能相机1并标定货架特征点,调整堆垛机至相邻坐标并识别特征点,智能相机1对比并记录偏差;如图5所示,在所述当前堆垛机坐标o的位置,调整智能相机1可以识别货架的特征点中心,与初始位置标定的图片特征点中心对比,计算偏差dis并记录,重复步骤,在集合q中记录所有柱点的偏差,对于立体仓库而言,本身会有不同程度的沉降,所以每个柱点的坐标之间会有偏差。
[0046]
(4)重复步骤(3)识别所有柱点偏差并记录;将所有柱点的偏差测量并记录;集合q中每个柱点的误差信息,即
[0047]
q(m,n).x=dis.x q(m,n).y=dis.y
[0048]
(5)根据托盘15宽度,横梁13高度,托盘15间距以及支柱14的宽度,这些数值都是已知的固定值,结合柱点的实际坐标,可以计算托盘15的坐标;托盘15的宽度w1、横梁13的高度h、托盘15的间距为d以及立柱7的宽度w2为固定值,结合相邻两个柱点的实际坐标,根据公式计算出托盘15的位置坐标;所述托盘15位置在两个立柱7之前,通过计算若两个立柱7的间距只能放置一个托盘15,则托盘15的位置在两个立柱7的中心;根据以上已知的数据,结合测量的出的数据,可以得出托盘15的精准坐标,对于p(0,0)右侧第一个托盘15,即:
[0049]
起始点p1
[0050]
p1.x=p(0,0).x
–
offsetx+q(0,0).x
[0051]
p1.y=p(0,0).y
–
offsety+q(0,0).y
[0052]
起始点p2
[0053]
p2.x=p(0,1).x
–
offsetx+q(0,1).x
[0054]
p2.y=p(0,1).y
–
offsety+q(0,1).y
[0055]
计算发现两个立柱7之间的距离不能放2个托盘15,
[0056]
(p2.x
–
p1.x
–
w2)/(w1+d/2)《2
[0057]
则托盘15的位置为2个立柱7的中心点,第一个托盘15的坐标为:
[0058]
position.x=(p2.x
–
p1.x)/2
[0059]
position.y=(p2.y
–
p1.y)/2
[0060]
对于一层货架上有两个托盘15,则由以下公式计算,如图3中所示,对于柱点p(1,0)右侧的两个托盘15的坐标,即:
[0061]
起始点p1
[0062]
p1.x=p(1,0).x
–
offsetx+q(1,0).x
[0063]
p1.y=p(1,0).y
–
offsety+q(1,0).y
[0064]
起始点p2
[0065]
p2.x=p(2,0).x
–
offsetx+q(2,0).x
[0066]
p2.y=p(2,0).y
–
offsety+q(2,0).y
[0067]
计算发现两个立柱7之间的距离不能放2个托盘15,
[0068]
2《(p2.x
–
p1.x
–
w2)/(w1+d/2)《3
[0069]
则托盘15的位置为2个立柱7的中心点,第1个托盘15的坐标为:
[0070]
m.x=(p2.x
–
p1.x)/2
[0071]
m.y=(p2.y
–
p1.y)/2
[0072]
position.x=m.x
–
d/2
–
w1/2
[0073]
position.y=m.y
[0074]
第2个托盘15的坐标为:
[0075]
position.x=m.x+d/2+w1/2
[0076]
position.y=m.y
[0077]
综上,本发明将智能智能相机1与堆垛机结合,将智能相机1装置与堆垛机货叉连接,进行测量;堆垛机的货架建立数学模型,通过堆垛机坐标实际位置与货架理论位置的比对,建立关系式,结合智能相机1的照片比对产生的误差,计算出托盘15的实际位置;本发明
能够高效,精准的对堆垛机立体仓库的测量。
[0078]
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。