1.本技术涉及码垛设备的领域,更具体地说,它涉及一种托盘自动码垛设备。
背景技术:
2.在砖块的运输过程中,砖块底部需要托盘进行承载,方便叉车搬运,将砖块输送至切割线进行切割;切割砖块前需要将砖块与托盘分离,为了方便分离,砖块的两侧凸出于托盘的两侧。回收托盘前需要将砖块吊起或者用叉车叉起,进行托盘与砖块的分离,然后进行单个托盘的回收,且整个托盘的回收过程都需要通过人工进行处理,但大批量托盘的回收处理,人工操作托盘回收的效率不高,有待改善。
技术实现要素:
3.为了提高托盘回收的效率,本技术提供一种托盘自动码垛设备。
4.本技术提供的一种托盘自动码垛设备,采用如下的技术方案:
5.一种托盘自动码垛设备,包括座体一和安装架,所述座体一上设有第一输送带,所述座体一上设有拨动件,所述拨动件设有两个,两个所述拨动件分别一一对应设置于所述第一输送带的两侧,所述拨动件用于拨动工件时工件与托盘分离;所述座体一上还设有驱动拨动件转动的第一驱动件;
6.所述安装架设置于所述第一输送带的上方,所述安装架的上端面与第一输送带的上端面平行,且所述安装架的上端面的长度方向垂直与所述第一输送带的输送方向;所述安装架上设有滑动装置,所述滑动装置沿所述安装架上端面的长度方向滑移;所述滑动装置连接有升降装置,所述升降装置沿竖直方向滑移;所述升降装置的底端连接有夹持装置,所述夹持装置用于夹持托盘。
7.通过上述技术方案,当工件在第一输送带上运输至拨动件的位置时,可以将第一输送带停止,此时拨动件可以将工件与托盘分离,将工件拨动到下一个工位;夹持装置可以夹持托盘,进行托盘的码垛,当托盘码垛到一定高度后,可以使用叉车将码垛后的托盘一次性叉起,进行回收,提高了托盘的回收效率。
8.可选的,所述座体一上设有限位件,所述限位件于第一输送带的上方且靠近拨动件的转动轴线设置,当拨动件拨动工件将工件与托盘分离时,限位件供托盘抵靠。
9.通过上述技术方案,当工件在第一输送带上运输至拨动件的位置时,无需停止第一输送带,限位件可以供托盘抵靠,提高托盘的回收效率。
10.可选的,所述拨动件靠近转动轴线的一侧连接有挡板;所述拨动件拨动工件时,所述挡板供工件抵靠,限制工件从拨动件上脱离。
11.通过上述技术方案,当拨动件拨动工件转动时,挡板用于供工件抵靠,提高拨动件拨动工件与托盘分离过程的稳定性。。
12.可选的,安装架的下方还设置有座体二;所述座体二上设有第二输送带,所述第二输送带的输送路径与所述第一输送带的输送路径平行且相反;所述夹持装置将托盘从第一
输送带夹持至第二输送带进行码垛,所述第二输送带用于输送码垛后的托盘。
13.通过上述技术方案,托盘在第二输送带上码垛形成托盘垛后,托盘垛可以在第二输送带上沿输送方向输送并堆叠,当第二输送带上的托盘垛堆满后,可以使用叉车将第二输送带上的托盘垛依次叉走,提高托盘回收的效率。
14.可选的,所述夹持装置包括两个夹板以及驱动两个夹板夹紧的第二驱动件,两个所述夹板相对的端面上均设有缓冲垫。
15.通过上述技术方案,设置缓冲垫,减少夹持装置夹持托盘时对托盘造成的磨损,提高托盘的耐用性。
16.可选的,所述缓冲垫与所述夹板通过螺栓连接。
17.通过上述技术方案,缓冲垫为易损件,设置缓冲垫与夹板通过螺栓连接,使得缓冲垫可进行更换,方便缓冲垫的拆卸。
18.可选的,所述升降装置包括电动葫芦以及多根升降杆;所述电动葫芦连接于所述滑动装置,所述升降杆滑动连接于滑动装置,且所述升降杆沿竖直方向滑动,所述升降杆的底端固定有固定座,所述固定座上端面与所述电动葫芦的吊钩固定连接,所述电动葫芦用于驱动升降杆沿竖直方向滑动。
19.通过上述技术方案,电动葫芦的吊钩在升降时可能会出现晃动,设置升降杆与电动葫芦的吊钩一起升降,提高升降装置整体升降的稳定性,改善托盘码垛的稳定性。
20.可选的,所述安装架上设有定位块一,所述定位块一对应于第一输送带设置,所述定位块一供所述滑动装置定位;所述安装架上设有定位块二,所述定位块二对应于第二输送带设置,所述定位块二块供所述滑动装置定位。
21.通过上述技术方案,设置定位块一和定位块二,使滑动装置在第一输送带和第二输送带之间移动,方便托盘码垛过程的定位,提高码垛的精准性。
22.可选的,所述定位块一朝向定位块二的端面设有缓冲块一,所述定位块二朝向定位块一的端面设有缓冲块二。
23.通过上述技术方案,减少滑动装置对定位块一和定位块二的冲击,提高码垛过程的稳定性。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.(1)通过设置拨动件将工件与托盘分离,夹持装置夹持托盘,进行托盘的码垛,当托盘码垛到一定高度后,可以使用叉车将码垛后的托盘一次性叉起,进行回收,提高了托盘的回收效率;
26.(2)通过设置缓冲垫,减少夹持装置夹持托盘时对托盘造成的磨损,提高托盘的耐用性;
27.(3)通过设置升降杆,提高升降装置整体升降的稳定性,改善托盘码垛的稳定性。
附图说明
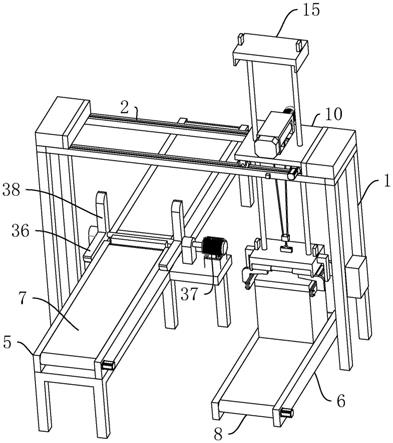
28.图1为本实施例的整体结构示意图。
29.图2为本实施例的整体结构示意图,用于展示滑动装置的结构。
30.图3为本实施例的整体结构示意图,用于展示升降装置的结构。
31.图4为本实施例的夹持装置的结构示意图。
32.图5为本实施例的拨动件的结构示意图。
33.附图标记:1、支架;2、安装架;3、架一;4、架二;5、座体一;6、座体二;7、第一输送带;8、第二输送带;9、滑槽;10、滑动装置;11、驱动轮;12、从动轮;13、伺服电机;14、滑动座;15、升降装置;16、电动葫芦;17、升降杆;18、固定座;19、连接板;21、固定块;22、凸环;23、定位块一;24、定位块二;25、缓冲块一;26、缓冲块二;27、夹持装置;28、夹持架;29、夹板;30、第二驱动件;31、架三;32、架四;33、板一;34、板二;35、缓冲垫;36、拨动件;37、第一驱动件;38、挡板;39、限位件。
具体实施方式
34.以下结合附图1-5对本技术作进一步详细说明。
35.本技术实施例公开一种托盘自动码垛设备。
36.参照图1和图2,包括支架1和安装架2。支架1共设有两个,两个支架1分别为架一3和架二4,架一3和架二4均沿竖直方向设置,安装架2长度方向的两端分别固定连接于架一3和架二4,且安装架2的上端面与下端面均沿水平方向设置。安装架2的下方设置有座体一5和座体二6。座体一5上安装有第一输送带7,座体二6上安装有第二输送带8,第一输送带7的输送方向沿水平方向设置,且第一输送带7的输送方向还垂直于安装架2的长度方向,第二输送带8的输送路径与第一输送带7的输送路径平行且相反。
37.安装架2的上端面沿长度方向开设有两条滑槽9,两条滑槽9相互平行设置。安装架2上安装有滑动装置10,滑动装置10包括驱动轮11、从动轮12、伺服电机13以及滑动座14,驱动轮11和从动轮12均转动连接于滑动座14,从动轮12设有三个;驱动轮11和三个从动轮12共四个轮子,将其分成两列,分别一一对应设置于滑动座14的两侧。伺服电机13固定于滑动座14的下端面,驱动电机的输出轴固定于驱动轮11,用于带动驱动轮11转动。驱动轮11和从动轮12均滚动连接于滑槽9,滑动座14沿安装架2的长度方向滑移。
38.参照图2和图3,滑动座14上安装有升降装置15,升降装置15包括电动葫芦16、升降杆17以及固定座18。电动葫芦16固定于滑动座14的上端面,滑动座14的上端面开设有供电动葫芦16吊钩通过的吊钩孔。滑动座14的上端面还开设有两个滑移孔,两个滑移孔沿安装架2的长度方向分别对应于吊钩孔的两侧设置;升降杆17共设有两根,两根升降杆17分别一一对应于两个滑移孔设置,升降杆17穿过滑移孔并沿竖直方向滑动连接于滑动座14。固定座18固定于升降杆17 的底部,升降杆17的顶部固定有连接板19,固定座18和连接板19均水平设置。固定座18上端面固定有固定块21,固定块21上固定有供电动葫芦16的吊钩穿过的凸环22,电动葫芦16的吊钩穿过凸环22将固定块21吊起。
39.安装架2的上端面沿长度方向的两端固定有定位块一23和定位块二24,定位块一23于第一输送带7的上方设置,定位块二24于第二输送带8的上方设置。定位块一23朝向定位块二24的端面固定有缓冲块一25,定位块二24朝向定位块一23的端面固定有缓冲块二26。
40.参照图3和图4,固定座18上安装有夹持装置27,夹持装置27包括夹持架28、夹板29以及第二驱动件30。夹持架28包括架三31和架四32,架三31和架四32均设置于固定座18的下端面,架三31固定于固定座18的下端面远离第一输送带7的一侧,架四32滑动连接于固定座18的下端面。夹板29供设有两个,两个夹板29分别为板一33和板二34,板一33固定于架三
31上,板二34固定于架四32上,板一33和板二34平行设置。第二驱动件30为液压缸,第二驱动件30固定于架三31上,第二驱动件30的输出端与架四32固定连接。第二驱动件30的输出端沿安装架2的长度方向移动。
41.可替代的,第二驱动件30还可以为气缸或直线电机。
42.板一33和板二34相对的端面上均安装有缓冲垫35,缓冲垫35共设有两个。板一33和板二34相对的端面上还开设有螺纹孔,缓冲垫35上设有通孔,通过在通孔中插入螺栓与螺纹孔螺纹连接,将两个缓冲垫35分别固定于板一33以及板二34上。
43.实际夹持过程中,第二驱动件30驱动板二34朝板一33移动,将托盘进行夹持;如需放下托盘,第二驱动件30驱动板二34朝远离板一33的方向移动,将托盘放下。
44.参照图5,座体一5上转动连接有拨动件36,拨动件36共设有两个,两个拨动件36分别一一对应于第一输送带7长度方向的两侧设置。两个拨动件36之间连接有转轴,转轴的轴线呈水平且垂直于第一输送带7的输送方向。座体一5上还固定有第一驱动件37,第一驱动件37为驱动电机。第一驱动件37的输出轴通过联轴器和转轴靠近第二输送带8的一端同轴连接。
45.拨动件36靠近转轴轴线的一侧固定有挡板38,挡板38的长度方向和拨动件36的长度方向相互垂直且相交,在工件拨动过程中,挡板38供工件抵靠。拨动件36和挡板38每次的转动角度为90
°
。
46.可替代的,第一驱动件37还可以为旋转气缸。
47.座体一5的上端面还固定有限位件39,限位件39沿第一输送带7的输送方向在第一输送带7和转轴之间设置,限位件39的高度高于第一输送带7的上端面且低于拨动件36的上端面,限位件39为水平设置,限位件39的长度方向垂直于第一输送带7的输送方向。
48.托盘和工件一起放置于第一输送带7上进行运输的过程中,当托盘抵靠于限位件39上时,拨动件36呈水平设置,且拨动件36上端面的高度高于第一输送带7上端面的高度,工件底面抵靠于拨动件36的上端面,工件的侧壁抵靠于挡板38上;第一驱动件37驱动拨动件36转动90
°
,使拨动件36带动工件和托盘分离,转动90
°
后,挡板38呈水平设置,此时挡板38上端面的高度低于下个工位输送带上端面的高度,工件随下个工位的输送带移动并脱离拨动件36和挡板38,工件脱离后,第一驱动件37驱动拨动件36复位。
49.本实施例的工作原理是:托盘和工件一起放置于第一输送带7上进行运输,当托盘抵靠于限位件39上时,拨动件36带动托盘和工件分离。托盘和工件分离后,托盘仍在第一输送带7上并抵靠于限位件39,滑动装置10沿安装架2的长度方向朝缓冲块一25的方向移动,直至抵靠于缓冲块一25上时,滑动装置10处于托盘的正上方;升降装置15带动夹持装置27下降,进行托盘的夹持;夹持到托盘后,升降装置15带动夹持装置27上升,然后滑动装置10沿安装架2的长度方向朝缓冲块二26的方向移动,直至抵靠于缓冲块二26,升降装置15带动夹持装置27下降,夹持装置27将托盘放下,进行托盘的码垛;当托盘码垛到一定高度后,控制第二输送带8将托盘码垛形成的托盘垛移走。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。