1.本发明涉及海洋垃圾清理技术领域,具体为一种滑翔式海洋垃圾回收装置
背景技术:
2.海洋垃圾是指在海洋和沿岸附近长期存留的人造的固体废物,其中以塑料为主,近些年来,海洋垃圾的数量和密度呈现出上升趋势,仅在太平洋上的海洋垃圾就已经达到了300多万平方千米,大量的海洋垃圾严重污染了海洋环境,造成了大量海洋生物的死亡,甚至会通过大自然的物质循环以及食物链关系逐渐威胁到人类的健康。
3.海洋垃圾在洋流、海风等自然环境的作用下在海面上运动,进而有分布面积广、持续时间长的特点,该特点造成目前大多数海洋垃圾回收方式成本高、劳动强度大、效率低等缺点。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种滑翔式海洋垃圾回收装置,用于回收大面积散布的海洋垃圾,解决了现有回收方式对海洋环境和海洋生物造成二次破环的问题,降低了海洋垃圾回收的劳动强度,扩大了对海洋的单次清理面积,提高了工作效率。
6.(二)技术方案
7.本发明通过以下技术方案进行实现:一种滑翔式海洋垃圾回收装置,包括垃圾收集舱、搅碎储存舱、姿态调整舱、浮力调整舱、推进舱,其特征在于:所述垃圾收集舱首部安装有垃圾进入舱门,所述垃圾收集舱内部安装有传送带、漏斗型收集室,所述垃圾收集舱尾部水密舱室固定安装有桅杆,所述桅杆安装有双目摄像头,所述双目摄像头可在桅杆顶部转动,所述搅碎储存舱固定安装于垃圾收集舱下方,并通过进料口与漏斗型收集室连通,所述搅碎储存舱首部上层为第二水密舱,且第二水密舱内安装有第二电机,所述第二水密舱下层安装有活动舱门,所述搅碎储存舱内部安装有搅碎机,所述搅碎机一端通过联轴器与第二电机相连,所述搅碎机下部安装有储存箱,所述搅碎储存舱尾部为推进舱,且推进舱为水密舱室,所述推进舱安装有螺旋桨、第三电机,所述姿态调整舱固定安装于搅碎储存舱下方,所述姿态调整舱为非水密舱,所述浮力调整舱固定安装于姿态调整舱下方,且浮力调整舱首尾有出/进水口。
8.优选的,所述传送带上安装有传送带挡板,且传送带挡板上有挡板透水孔,所述传送带与第一滚轮、第二滚轮、第三滚轮相接,且第三滚轮一端通过齿轮组与第一电机相连,板透水孔的设置可对海洋垃圾中的水分进行第一次去除,有利于搅碎机对海洋垃圾进行粉碎。
9.优选的,所述储存箱两侧安装于有导轨,所述储存箱底部有储存箱透水孔,导轨的设置可为统一清理储存箱中的海洋垃圾提供方便,储存箱透水孔的设置可对海洋垃圾中的水分进行第二次去除。
10.优选的,所述姿态调整舱内部安装有上层透水板、竖直透水板、水密板,所述上层透水板上有上层透水孔、所述竖直透水板有竖直板透水孔,所述姿态调整舱首尾有安装有抽水泵且抽水泵两侧的下层透水板上有下层排水孔,抽水泵的安装可该改变水密板两侧海水的重量,进而实现装置姿态的控制,为装置的滑翔奠定基础。
11.优选的,所述浮力调整舱内部水密舱室安装有第二推杆电机、第二推杆,所述第二推杆电机下部通过电机支座安装于底座,所述第二推杆一端与排/吸管内滑块固连,第二推杆的运动改变排/吸管内海水的体积进而可以实现装置浮力的调整。
12.优选的,所述垃圾进入舱门上有滑动杆,且滑动杆另一端安装于导槽内,所述垃圾进入舱门安装有曲柄,且曲柄另一端安装于转动轴,所述转动轴安装有转动杆,且转动杆另一端与安装于第一推杆电机内的第一推杆连接,所述第一推杆电机安装于转动基座。
13.(三)有益效果
14.本发明提供了一种滑翔式海洋垃圾回收装置具备以下有益效果:
15.1.垃圾收集舱尾部水密舱室固定安装有桅杆,桅杆安装有双目摄像头,双目摄像头可在桅杆顶部转动,可实现对海洋垃圾的识别;姿态调整舱固定安装于搅碎储存舱下方,姿态调整舱为非水密舱,内部安装有上层透水板、竖直透水板、水密板,上层透水板上有上层透水孔、竖直透水板有竖直板透水孔,姿态调整舱首尾有安装有抽水泵且抽水泵两侧的下层透水板上有下层排水孔,浮力调整舱固定安装于姿态调整舱下方,且浮力调整舱首尾有出/进水口,浮力调整舱内部水密舱室安装有第二推杆电机、第二推杆,第二推杆电机下部通过电机支座安装于底座,第二推杆一端与排/吸管内滑块固连,姿态调整舱中首尾部的抽水泵通过调整姿态调整舱内前后段海水的体积进而改变装置的姿态,同时浮力调整舱内的第二推杆电机带动滑块运动,调节排/吸管内海水的体积实现装置浮力的改变,经过姿态调整舱与浮力调整舱的作用,装置进入滑翔状态,运动至海洋垃圾附近,启动螺旋桨回收海洋垃圾;整个回收过程不需要人力操作,在降低工人劳动强度的同时,通过滑翔运动的方式降低了回收海洋垃圾的能耗,扩展装置的单次任务海域,
16.2.垃圾收集舱内部安装有传送带,传送带上安装有传送带挡板,且传送带挡板上有挡板透水孔,搅碎储存舱固定安装于垃圾收集舱下方,并通过进料口与漏斗型收集室连通,碎储存舱内部安装有搅碎机,搅碎机一端通过联轴器与第二电机相连,搅碎机下部安装有储存箱,储存箱两侧安装于有导轨,底部有储存箱透水孔;挡板透水孔对海洋垃圾进行第一次除水,有利于搅碎机对海洋垃圾进行粉碎,储存箱透水孔对被粉碎的海洋垃圾进行第二除水,有利于提高储存箱的储存量以及后续对储存箱的清理工作。
附图说明
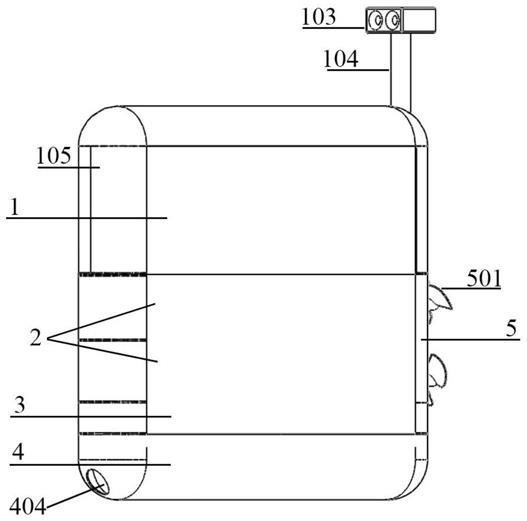
17.图1为本发明结构的立体图
18.图2为本发明主视方向的剖视图
19.图3为本发明浮力调整舱俯视方向的剖视图
20.图4为本发明姿态调整舱俯视方向的剖视图
21.图5为本发明上层透水板俯视图
22.图6为本发明搅碎机俯视图
23.图7为本发明搅碎储存舱左视方向的剖视图
24.图8为本发明垃圾收集舱主视方向的剖视图
25.图9为本发明垃圾收集舱左视方向的剖视图
26.图10为本发明垃圾进入舱门的立体图
27.图中标记如下:
28.1-垃圾收集舱、101-传送带、102-漏斗型收集室、103-双目摄像头、104-桅杆、105-垃圾进入舱门、106-第一滚轮、107-第一电机、108-齿轮组、109-挡板透水孔、110-导槽、111-滑动杆、112-曲柄、113-转动轴、114-第一推杆、115-第一推杆电机、116-固定板、117-转动基座,118-转动杆、119-水密舱室、120-第二滚轮、121-第三滚轮、122-传送带挡板2-搅碎储存舱、201-搅碎机、202-储存箱、203-导轨、204-第二电机、205-联轴器、206储存箱透水孔,207-进料口、208-第二水密舱、209-活动舱门、3-姿态调整舱、301-抽水泵、302-下层排水孔、303-竖直透水板、304-竖直板透水孔、305-下层透水板、306-上层透水板、307-上层透水孔、308-水密板、4-浮力调整舱、401-排/吸管、402-第二推杆电机、403-第二推杆、404-出/进水口、405-电机支座、406-底座、407-滑块、408-第三水密舱、5-推进舱、501-螺旋桨、502-第三电机
具体实施方式
29.下面讲结合本发明实施例中的附图,对本发明的具体实施方式进行进一步说明:
30.请参阅图1-10,本发明实施例提供了一种技术方案:一种滑翔式海洋垃圾回收装置,包括垃圾收集舱1、搅碎储存舱2、姿态调整舱3、浮力调整舱4、推进舱5,垃圾收集舱1首部安装有垃圾进入舱门105,垃圾进入舱门105上有滑动杆111,且滑动杆111另一端安装于导槽110内,垃圾进入舱门105安装有曲柄112,且曲柄112另一端安装于转动轴113,转动轴113安装有转动杆118,且转动杆118另一端与安装于第一推杆电机115内的第一推杆114连接,第一推杆电机115安装于转动基座117,垃圾收集舱1内部安装有传送带101、漏斗型收集室102,尾部水密舱室固定安装有桅杆104,桅杆104顶部安装有可转动的双目摄像头103,传送带101上安装有传送带挡板122,且传送带挡板122上有挡板透水孔109,传送带101与第一滚轮106、第二滚轮120、第三滚轮121相接,且第三滚轮121一端通过齿轮组108与第一电机107相连,搅碎储存舱2固定安装于垃圾收集舱1下方,并通过进料口207与漏斗型收集室102连通,搅碎储存舱2首部上层为第二水密舱208,且第二水密舱208内安装有第二电机204,第二水密舱208下层安装有活动舱门209,搅碎储存舱2内部安装有搅碎机201,搅碎机201一端通过联轴器与第二电机204相连,搅碎机201下部安装有储存箱202,储存箱202两侧安装于有导轨203,底部有储存箱透水孔206,搅碎储存舱2尾部为推进舱5,且推进舱5为水密舱室,推进舱5安装有螺旋桨501、第三电机502,姿态调整舱3固定安装于搅碎储存舱2下方,姿态调整舱3为非水密舱,内部安装有上层透水板306、竖直透水板303、水密板308,上层透水板306上有上层透水孔307、竖直透水板303有竖直板透水孔304,姿态调整舱3首尾有安装有抽水泵301且抽水泵301两侧的下层透水板305上有下层排水孔302,浮力调整舱4固定安装于姿态调整舱3下方,且浮力调整舱4首尾有出/进水口404,浮力调整舱4内部水密舱室安装有第二推杆电机402、第二推杆403,第二推杆电机402下部通过电机支座405安装于底座406,第二推杆403一端与排/吸管401内滑块407固连。
31.使用时运动至海洋垃圾附近时,启动螺旋桨501,同时打开垃圾进入舱门105,海洋
垃圾进入垃圾收集舱1,并通过传送带101完成第一次除水后,经漏斗型收集室102、进料口207进入搅碎储存舱2的搅碎机201,在搅碎机201的作用下完成对海洋垃圾的粉碎,粉碎后的海洋垃圾落入储存箱202,携带的海水通过储存箱202上的储存箱透水孔206、姿态调整舱3的上层透水孔307进入姿态调整舱3中,待完成该区域海洋垃圾清理后,操纵双目摄像头103获取海洋垃圾位置信息,关闭垃圾进入舱门105,姿态调整舱3中首尾部的抽水泵301通过调整姿态调整舱3内前后段海水的体积改变装置的姿态,同时浮力调整舱4内的第二推杆电机402带动滑块407运动,调节排/吸管(401)内海水的体积实现装置浮力的改变,经过姿态调整舱3与浮力调整舱4的作用,装置进入滑翔状态,运动至海洋垃圾附近时,浮出水面启动螺旋桨501,继续进行海洋垃圾的清理,待储存箱202储存量已满时,通过活动舱门209、导轨203可将储存箱202取出,清理内部的海洋垃圾,这样就完成了整个工作。
32.可以理解不脱离本发明的构思和范围的情况下可以有许多改变,本发明不限于特定的实施方式,本发明的范围有所附权利要求书限定。