1.本发明涉及海洋设备技术领域,具体是一种混合驱动的锚链清洗与检测机器人及其作业方法。
背景技术:
2.随着海洋油气开发和海洋资源利用的需要,浮式海洋工程装备的应用越来越广,包括浮式海洋平台、fpso、浮式风电平台以及浮式渔业网箱等。锚泊定位系统是海洋工程装备的重要组成部分,其作用是将海洋工程装备固定在作业区域内,系泊系统的安全性关乎着海洋工程设施的安全。
3.目前,我国南海海域的浮式生产储卸油装置、服役和在建的半潜式生产和钻井平台以及采用悬链浮筒式单点系泊式的原油外输终端都采用锚泊式系泊系统进行海上定位,涉及资产规模达到超过2000亿元。一旦系泊系统发生安全事故,将导致了巨大的经济损失,同时有可能导致严重的海洋环境污染。例如,2005年英国bp石油公司thunder horse平台遭遇腿飓风袭击,导致系泊系统失效,引起整个平台倾覆;2006年5月,“胜利号”fpso的7根锚链断裂,仅剩3根描链维持系泊,导致流花油田停产一年。因此,具备系泊系统高水平检测技术能力和保障海洋工程装备安全性对于保障我国海洋油气安全和海洋环境安全具有重要意义,应受到更加重视。
4.锚泊定位系统一般由系泊缆与桩基组成,而根据水深的不同,系泊缆一般由锚链与钢缆组合缆、锚链、钢缆与纤维缆组合缆等形式。由于浮式海洋工程装备受到风、浪、流等环境条件的影响,系泊链在水中始终处于运动状态,外部的环境荷载主要作用在系泊锚链和桩基上;此外,海生物的附着与海水腐蚀性会造成锚链结构的损伤,海底底流会不断冲刷会造成走锚等现象。这些都对锚链检测技术手段等提出了更高要求。目前的工程实践中通常采用包括将锚链回收到甲板进行目视检查、将锚链带回岸上进行无损检测(ntd)、潜水员水下原位检测以及作业型无人遥控潜水器(rov)原位检测等四种方法,采用将锚链回收到甲板进行目视检查或将锚链带回岸上进行无损检测不适用于需永久系泊的浮式油气生产平台:为了解决上述技术瓶颈,本专利提出一种混合驱动的锚链清洗与检测机器人及其作业方法。
技术实现要素:
5.本发明的目的在于提供一种混合驱动的锚链清洗与检测机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下一种技术方案:
7.一种混合驱动的锚链清洗与检测机器人,包括:不少于一个框架结构;
8.浮力系统,设置在框架结构上,用于调整机器人浮力;
9.驱动系统,设置在框架结构上;
10.所述驱动系统包括螺旋桨推进驱动系统和轮式驱动系统;所述螺旋桨推进驱动系
统系统用于提供水下运动的动力;所述轮式驱动系统用于驱动机器人在锚链上移动;
11.水下观通系统,设置在框架结构上,用于对水下进行观察;
12.清洗系统,设置在框架结构上,用于对锚链进行清洗;
13.主动抱紧展开系统,设置在框架机构上;
14.以及设置在框架结构上的检测系统。
15.作为本发明进一步的方案:所述浮力系统包括布置在框架结构上的多个浮力材料。
16.作为本发明再进一步的方案:所述螺旋桨推进驱动系统包括垂向推进器和水平推进器;所述水平推进器对称布置在框架机构上,所述垂向推进器对称布置在框架机构上;所述垂向推进器和水平推进器分别布置在框架机构不同的的主要框架上。
17.作为本发明再进一步的方案:所述轮式驱动系统包括设置在框架机构上的两对移动轮;每对移动轮之间相互垂直且处于不同的平面。
18.作为本发明再进一步的方案:所述夹紧系统包括丝杠和调节弹簧,调节弹簧位于每对移动轮的一侧,调节弹簧另一侧则为丝杠与丝杠螺母的配合,调节弹簧另一侧连接在丝杠上,所述丝杠转动安装在框架机构上,所述丝杠螺母设置在丝杠端部。
19.作为本发明再进一步的方案:所述清洗系统位于框架机构的最下端,清洗系统包括设置在框架机构上的高压水枪,所述高压水枪可以使用紧定螺钉固定在浮力材料上。
20.作为本发明再进一步的方案:所述主动抱紧展开系统包括外置电机和电磁铁,外置电机和电磁铁对立布置,两者设置框架机构的顶端位置上。
21.本发明提供如下另一种技术方案:
22.一种混合驱动的锚链清洗与检测机器人作业方法,包括以下步骤:
23.将机器人轻放至系泊链附近位置,此时机器人处于抱紧状态;
24.待布放至水下一定距离后,机器人通过螺旋桨推进驱动系统驱动,自由浮游至锚链附近;
25.机器人由抱紧状态切换至展开状态,然后利用驱动系统驱动机器人移动;使锚链进入机器人内部,此时通过驱动外置电机使机器人切换至抱紧状态;
26.若机器人与锚链规格不适配,则调整机器人与锚链间的相对位置;
27.机器人携带的清洗装置位于机器人下方,下水之后通过水下电机驱动机器人轮子沿着锚链移动;首先,采用同时对锚链进行清洗,水下观通系统位于机器人正上方,避开清洗区域工作时的浑浊环境;
28.工作完成之后,机器人回到水面,然后控制其由抱紧状态切换至展开状态,与锚链分离后,然后回到抱紧状态,并通过母船回收机器人。
29.与现有技术相比,本发明的有益效果是:
30.1、采用混合驱动形式,机器人可以自主地到达作业锚链区域,就位作业;作业时,可采用轮式驱动或推力驱动沿锚链行走作业;作业完成后,自主返回时水面并回收;
31.2、不借助于人力安装,实现自主在锚链上的就位与安装;
32.3、作业时,通过控制与锚链的相对运动,实现了稳定检测作业;
33.4、锚链检测作业首先要进行锚链表面所附着的海生物清洗,通过搭载清洗喷冲头,可实现清洗与检测的同步作业,提高了作业效率;此外,采用开架式的框架结构,可根据
作业载荷不同,灵活调整配置,也便于设备的维护保养。
附图说明
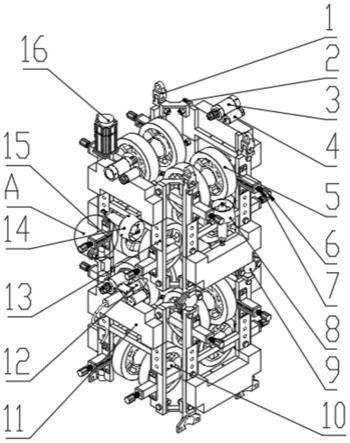
34.图1为混合驱动的锚链清洗与检测机器人的结构示意图。
35.图2为图1中a处放大示意图。
36.图3为混合驱动的锚链清洗与检测机器人中外框架整体结构示意图。
37.图4为混合驱动的锚链清洗与检测机器人俯视图。
38.图中:1-吊钩、2-水下测厚仪、3-水下摄像机、4-水下灯、5-移动轮、6-丝杠螺母、7-丝杠、8-垂向推进器、9-球面副、10-内置电机、11-浮力材料、12-高压水枪、13-主要框架、14-水平推进器、15-弹簧、16-外置电机、外置电机安装平台-17、18-连接框架、19-电磁铁、20-上主要框架、21-下主要框架。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.实施例1
41.请参阅图1~图4,本发明实施例1中,为本发明实施例提供的一种混合驱动的锚链清洗与检测机器人的结构图,包括:不少于一个框架结构;浮力系统,设置在框架结构上,用于调整机器人浮力;驱动系统,设置在框架结构上;所述驱动系统包括螺旋桨推进驱动系统和轮式驱动系统;所述螺旋桨推进驱动系统用于提供水下运动的动力;所述轮式驱动系统用于驱动机器人在锚链上移动;水下观通系统,设置在框架结构上,用于对水下进行观察;清洗系统,设置在框架结构上,用于对锚链进行清洗;主动抱紧展开系统,设置在框架机构上;以及设置在框架结构上的检测系统。
42.所述框架结构为用于搭载各个系统的主体结构,外框架有主要框架13,所述主要框架13包括左框架和右框架,所述左框架和右框架一侧转动安装在一起,另一侧可拆卸式连接。做框架和右框架均包括上主要框架20和下主要框架21,所述上主要框架20用于与相邻的主要框架13上的下主要框架21配合,所述下主要框架21用于与相邻的主要框架13上的上主要框架20配合。所述左框架上设置有连接框架18,用于相邻主要框架13之间相互连接。
43.相邻主要框架13通过连接框架18和紧定螺钉进行连接,主要框架13保证框架有足够的刚度以支撑本体,每个主要框架又分为上主要框架20和下主要框架21,两者之间可以进行伸缩以满足应用于不同规格的系泊锚链上,调整大小后通过紧定螺钉将两部分固定。多个框架结构之间利用球面副9进行连接,使得每相邻模块之间可以弯曲成一定角度,另外考虑到系泊链相邻链节间的扭转作用,移动轮5要求允许在一定扭转范围内适应这种变化。因为铝合金具有密度低、强度高、耐腐蚀性好、加工成本低的特点,故使用6061-t6铝合金通过焊接、螺栓连接等形式构成一体,作为框架结构。最终满足设备布置和总体强度要求。
44.所述框架结构上设置有吊钩1。
45.所述浮力系统包括布置在框架结构上的多个浮力材料11,用以提供平衡机器人自
重的浮力。所述浮力材料11的基本原材料由中空玻璃微珠与环氧树脂通过一定配比组成,并满足环境压力要求。浮力材料11外表面喷涂油漆等材料以起到防腐的作用。所述浮力材料11使用紧定螺钉安装固定于框架结构上的主要框架13上。
46.所述螺旋桨推进驱动系统系统包括垂向推进器8和水平推进器14;所述水平推进器14对称布置在框架机构上,所述垂向推进器8对称布置在框架机构上;所述垂向推进器8和水平推进器14分别布置在框架机构不同的的主要框架13上。垂向推进器8和水平推进器14可以通过紧定螺钉固定安装在框架机构上。
47.通过设置垂向推进器8和水平推进器14一方面帮助机器人水下移位、就位与返回,另一方面可以辅助机器人沿锚链上、下运动。水平推进器14和垂向推进器8的布置分别接近于机器人整体重心的纵向和垂向坐标。
48.所述轮式驱动系统包括设置在框架机构上的两对移动轮5;每对移动轮5之间相互垂直且处于不同的平面;其中移动轮5上设置有内置电机10;所述内置电机10为移动轮5转动提供动力。
49.移动轮5安装在夹紧系统的输出端。进而使得每对移动轮5之间相互远离。两者之间的距离可通过框架机构进行调整以适应不同的系泊链。每个轮子均配备一个内置电机10,通过内置电机10来控制机器人在系泊链上的上升和下降。机器人在上升与下降时会受到流体阻力以及链轮之间的摩檫力,其中链轮间的摩擦力作为驱动力,在内置电机10无法使用等情况下,可以启动推进器来实现机器人沿锚链的移动。
50.移动轮5可以通过紧定螺钉安装在夹紧系统上。
51.所述夹紧系统包括丝杠7和调节弹簧15,调节弹簧15位于每对移动轮5的一侧,调节弹簧15另一侧则为丝杠7与丝杠螺母6的配合,调节弹簧15另一侧连接在丝杠7上,所述丝杠7转动安装在框架机构上,所述丝杠螺母6设置在丝杠7端部,如此为了驱动丝杠螺母6转动。然后另一侧通过调节弹簧15的压紧程度对机器人进行夹紧。在移动的过程中如遇系泊链表面凹凸不平的情况可通过弹簧15的伸缩来适应。使用紧定螺钉与框架机构的主要框架13相连接。
52.所述水下观通系统包括水下灯4和水下摄像机3。
53.所水下述观通系统分为两组,一组在框架机构内部,其作用是沿锚链爬行作业时,进行锚链结构的完整性检查;另外一组位于框架机构外侧,其作用是辅助机器人在水下的移动与就位。
54.所述清洗系统位于框架机构的最下端,清洗系统包括设置在框架机构上的高压水枪12,所述高压水枪12可以使用紧定螺钉固定在浮力材料11上,所述高压水枪12设置在对内的水下摄像机3与水下灯4之间,在前进时首先使用高压水枪12对系泊链进行清洗,可以选择全区域清洗或定点清洗。全区域清洗时则可以提高系泊链表面的清洁程度以及移动轮5的前进路况,定点清洗则是只清洗需要进行检测的位置。
55.所述主动抱紧展开系统包括外置电机16和电磁铁19,外置电机16和电磁铁19对立布置,两者设置框架机构的顶端位置上,外置电机16设置在左框架或者右框架上的外置电机安装平台17上;所述外置电机安装平台17设置在左框架、右框架之间转动连接侧,所述电磁铁19设置在左框架和右框架的另一侧,所述电磁铁19用于将左框架和右框架吸合在一起。电磁铁19为对侧连接框架18的一部分。机器人展开时,发出电磁铁19断电命令,然后启
动外置电机16驱动框架展开,需要机器人抱紧时,启动外置电机16驱动框架闭合之后电磁铁19通电使得机器人完成抱紧。
56.所述检测系统包括水下测厚仪2、水下裂纹检测仪和电位测量仪等,根据任务需求进行搭载。
57.本发明采用混合驱动形式,机器人可以自主地到达作业锚链区域,就位作业;作业时,可采用轮式驱动或推力驱动沿锚链行走作业;作业完成后,自主返回时水面并回收;不借助于人力安装,实现自主在锚链上的就位与安装;作业时,通过控制与锚链的相对运动,实现了稳定检测作业;锚链检测作业首先要进行锚链表面所附着的海生物清洗,通过搭载清洗喷冲头,可实现清洗与检测的同步作业,提高了作业效率;此外,采用开架式的框架结构,可根据作业载荷不同,灵活调整配置,也便于设备的维护保养。
58.实施例2
59.本发明实施例还提供了一种混合驱动的锚链清洗与检测机器人作业方法,包括以下步骤:
60.(1)将机器人轻放至系泊链附近位置,此时机器人处于抱紧状态;
61.具体的,通过母船上的吊机牵引机器人吊钩部分,脐带缆通过脱钩器与机器人连接,并将机器人轻放至系泊链附近位置,此时机器人处于抱紧状态,便于机器人下一步工作;
62.(2)待布放至水下一定距离后,机器人通过驱动系统驱动,自由浮游至锚链附近;
63.具体的,待布放至水下一定距离后,发送命令释放脱钩器,机器人通过螺旋桨推进驱动系统驱动,自由浮游至锚链附近;
64.(3)机器人由抱紧状态切换至展开状态,然后利用驱动系统驱动机器人移动;使锚链进入机器人内部,此时通过驱动外置电机使机器人切换至抱紧状态;
65.具体的,随后机器人由抱紧状态切换至展开状态,然后利用螺旋桨推进驱动系统移动机器人,使锚链进入机器人内部,此时通过驱动外置电机使机器人切换至抱紧状态,此时机器人两组移动轮抱紧锚链提供足够压力保证其之后能够在锚链上移动;
66.(4)若机器人与锚链规格不适配,则调整机器人与锚链间的相对位置;
67.具体的,若机器人与锚链规格不适配,则通过推进器微调机器人与锚链间的相对位置;
68.(5)清洗与检测作业。机器人携带的清洗装置位于机器人下方,下水之后通过水下电机驱动机器人轮子沿着锚链移动;首先,采用同时对锚链进行清洗,水下观通系统位于机器人正上方,避开清洗区域工作时的浑浊环境,便于观测锚链以及实现对锚链的厚度以及裂纹检测。
69.(6)工作完成之后,机器人回到水面,然后控制其由抱紧状态切换至展开状态,与锚链分离,然后回到抱紧状态。
70.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。