1.本实用新型涉及水下机器人技术领域,具体为一种新型水下勘测装置。
背景技术:
2.无人潜航器是一种能下潜的无人自生航行系统,由载体结构、控制系统、导航系统、能源系统和推进系统等系统和设备组成;水下机器人的研究最早出现于20世纪60年代,许多沿海国家尤其是发达国家都致力于水下机器人技术研究和产品开发;美国、加拿大、英国、日本、俄罗斯以及我国等等国家,都成立了专门的机构或者在高校里成立研究室研究水下机器人技术;如美国的海军研究生院的自主式水下运载器研究中心,缅因州立大学的海洋系统工程实验室和自治海下系统学院,英国的海事技术中心,日本东京大学的水下机器人应用实验室,我国的沈阳自动化所和哈尔滨工程大学的水下机器人国防科技重点实验室等都为推动水下机器人技术的发展做出应有的贡献;但现有的无人潜航器的民用领域还很少有人涉及,无人潜航器的结构设计也是少之又少;鉴于此,针对上述问题深入研究,遂有本案产生。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种新型水下勘测装置,解决了现有的的无人潜航器的民用领域还很少有人涉及,无人潜航器的结构设计也是少之又少等问题;
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种新型水下勘测装置,包括壳体、两个转向推进器、主推进器、摄像头、探照灯、机械手、水样采集器、温度采集器、ph值传感器以及排水孔,两个所述转向推进器分别安装于所述壳体两侧,所述主推进器安装于所述壳体后方,所述摄像头安装于所述壳体前上方,所述探照灯安装于所述壳体下前方,所述机械手安装于所述壳体下前方,所述水样采集器、温度采集器以及ph值传感器均安装于所述壳体底部,所述排水孔开设于所述壳体底部,所述壳体内部安装有沉浮控制结构。
5.优选的,所述沉浮控制结构包含有:杠杆、连接器、升降器壳体、橡胶活塞以及注水头;
6.所述杠杆与所述壳体内部舵机连接,所述连接器一端与所述杠杆一端连接,另一端贯穿所述升降器壳体与所述橡胶活塞连接,所述注水头与所述升降器壳体底部连接。
7.优选的,所述摄像头为鹏之浩102款摄像头。
8.优选的,所述探照灯为clowicsr新s5探照灯。
9.优选的,所述机械臂为spt 5425lv 25kg全防水金属齿数码标准舵机机械臂。
10.优选的,所述水样采集器为tds水质检测模块,温度采集器为防水型ds18b20温度探头。
11.有益效果
12.本实用新型提供了一种新型水下勘测装置,具备以下有益效果:本案结构轻便小
巧,设计紧凑,单人即可完成全部操作,大功率探照灯灯实现了为观测提供了照明条件,利用摄像头实现对水下的情况进行观测,并可以根据需要搭配机械手、水质传感器、取样器等多种附件,适用于多数浅水区域,可以实现水底垃圾清理,水底质量检测,水底地形检测,水底取样等多个功能,具有高度的可操控性和稳定性,运动姿态丰富、灵活,操控便捷,可带来超强的驾驭体验等优点,解决了现有的现有的无人潜航器的民用领域还很少有人涉及,无人潜航器的结构设计也是少之又少等问题。
附图说明
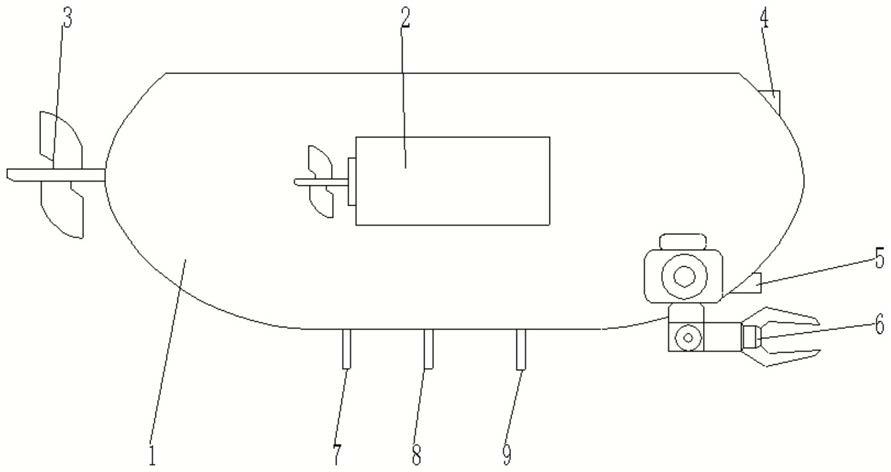
13.图1为本实用新型所述一种新型水下勘测装置的主视结构示意图。
14.图2为本实用新型所述一种新型水下勘测装置的侧视结构示意图。
15.图3为本实用新型所述一种新型水下勘测装置的仰视结构示意图。
16.图4为本实用新型所述一种新型水下勘测装置的沉浮控制结构结构示意图。
17.图中:1-壳体;2-转向推进器;3-主推进器;4-摄像头;5-探照灯;6-机械手;7-水样采集器;8-温度采集器;9-ph值传感器;10-排水孔;11-杠杆;12-连接器;13-升降器壳体;14-橡胶活塞;15-注水头。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器以及编码器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不再对电气控制做说明。
20.本案组件主要为:壳体1、两个转向推进器2、主推进器3、摄像头4、探照灯5、机械手6、水样采集器7、温度采集器8、ph值传感器9以及排水孔10,两个转向推进器2分别安装于壳体1两侧,主推进器3安装于壳体1后方,摄像头4安装于壳体1前上方,探照灯5安装于壳体1下前方,机械手6安装于壳体1下前方,水样采集器7、温度采集器8以及ph值传感器9均安装于壳体1底部,排水孔10开设于壳体1底部,壳体1内部安装有沉浮控制结构;
21.需要说明的是,壳体1由3d打印制成,打印材料为pla abs petg 1.75 3.01kg打印笔丝线,此材料具有材质轻,不易变形,防水性能好,应用范围广的优点,设计形状为不规则椭球型,拥有重量平衡,不易失控等优点,并且两个转向推进器2以及主推进器3均由防水电机(2430-8200-6300-5800)进行驱动,在使用过程中,所述主推进器3控制壳体1前进后退,两个转向推进器2控制壳体1进行转向,同时提供前进后退的动力,主推进器3安装于壳体1尾部主推进器3只露出螺旋桨部分,防止机体进水,机械手6安装在壳体1前部偏下,可用于清障或者采样,探照灯5安装在壳体1前面,摄像头4安装在壳体1前部偏上,安装的时候具有一定偏下的角度,使摄像头4可以看到探照灯5照亮的地方,沉浮控制结构安装于壳体1内部并与排水孔10连接,并用于控制装置整体进行下沉或者浮起。
22.在具体实施过程中,进一步的,沉浮控制结构包含有:杠杆11、连接器12、升降器壳体13、橡胶活塞14以及注水头15;
23.杠杆11与壳体1内部舵机连接,连接器12一端与杠杆11一端连接,另一端贯穿升降器壳体13与橡胶活塞14连接,注水头15与升降器壳体13底部连接;
24.需要说明的是,在使用过程中,杠杆11与壳体1内部舵机连接,操作人员控制舵机运行,带动杠杆11运动,带动连接器12运动,进而带动橡胶活塞14进行运动,可以实现从注水头15出抽水排水,最后实现控制装置整体下沉或者浮起。
25.在具体实施过程中,进一步的,摄像头4为鹏之浩102款摄像头4。
26.在具体实施过程中,进一步的,探照灯5为clowicsr新s5探照灯5。
27.在具体实施过程中,进一步的,机械臂为spt 5425lv 25kg全防水金属齿数码标准舵机机械臂。
28.在具体实施过程中,进一步的,水样采集器7为tds水质检测模块,温度采集器8为防水型ds18b20温度探头。
29.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个
……
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
30.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。