1.本实用新型实施例涉及机器人技术领域,具体涉及一种爬壁清洗机器人系统。
背景技术:
2.目前,很多大型远洋船舶的船舷部分采用“一人一绳式”缓慢地进行清洗工作,由于船体龙骨向内倾斜,导致这种方法效率低、成本高且具有高危性。而且由于船体部分长期浸泡在海水里,船体表面往往会附着大量的藻类,油污或者锈蚀,当前现有的清洗机器人普遍存在清洗效果差、结构复杂笨重、效率低难以满足使用要求,有鉴于此,我方提出一种新的技术方案,来解决此问题。
技术实现要素:
3.为此,本实用新型实施例提供一种爬壁清洗机器人系统,以解决现有技术中由于前现有的清洗机器人普遍存在清洗效果差而导致的难以满足使用要求的问题。
4.为了实现上述目的,本实用新型实施例提供如下技术方案:
5.本实用新型提供了一种爬壁清洗机器人系统,包括磁吸附模块、清洗模块、伺服驱动模块和底架安装模块,所述清洗模块螺接固定在底架安装模块中部,所述底架安装模块两端螺接固定有两个伺服驱动模块,两个所述伺服驱动模块上设置有两个所述磁吸附模块。
6.进一步的,所述磁吸附模块包括永磁体、导向板、安装板、调节螺杆和限位套,所述底架安装模块与安装板的一端螺接固定,所述安装板的另一端与导向板螺接固定,所述导向板内滑动设置有永磁体,所述永磁体与调节螺杆的一端相连,所述调节螺杆螺接插设在安装板中部,所述调节螺杆的另一端安装有限位套,所述限位套插设有定位销。
7.进一步的,所述底架安装模块包括底架梁、锁定块、翻盖、压板、旋转接头和铰接座,所述安装板固定在底架梁上,所述底架梁的一侧设置有一对铰接座,一对所述铰接座与两个旋转接头铰接,两个旋转接头螺接固定在压板上,所述压板上固定有两个锁定块,两个所述锁定块与两个压板相抵,两个压板螺接固定在底架梁上。
8.进一步的,所述伺服驱动模块包括驱动电机、减速机、安装架、变速箱、麦克娜姆轮,所述底架梁的两端与两个安装架螺接固定,任意一个所述安装架的上方对称设置有两个驱动电机,两个所述驱动电机与两个减速机传动连接,两个所述减速机与两个变速箱传动连接,两个所述变速箱与两个所述麦克娜姆轮传动连接。
9.进一步的,所述安装架包括提手、架体和吊环,所述底架梁与架体螺接固定,所述架体的中部设置有吊环,所述吊环两侧位于架体端部对称设置有两个提手。
10.进一步的,所述清洗模块包括冲洗装置和回收装置,所述翻盖上固定安装有回收装置,所述回收装置上安装有冲洗装置。
11.进一步的,所述回收装置包括真空回收管、负压回收桶、弹性支架和毛刷所述翻盖中部竖直固定设置有负压回收桶,所述负压回收桶与真空回收管连通,所述负压回收桶上
滑动套设有弹性支架,所述弹性支架底部设置有毛刷。
12.进一步的,所述冲洗装置包括伺服电机、注水管、空心转轴和十字清洗盘,所述负压回收桶轴心处设置有空心转轴,所述空心转轴一端与注水管连通,所述空心转轴另一端与十字清洗盘连通,所述空心转轴与伺服电机传动连接。
13.本实用新型实施例具有如下优点:
14.本技术方案先比较现有技术,有效将回收装置以及冲洗装置结合在一起,不仅提高了清洗效率,同时利用负压回收桶产生的负压,结合永磁体吸附船体,显著提高了机器人在垂直壁运行的稳定性,其次,本实用新型利用了结合伺服电机带动麦克娜姆轮差速转动,从而有效提高了机器人移动得灵活性,并由此提高了机器人的工作效率,降低了人力成本,解决了现有技术中由于前现有的清洗机器人普遍存在清洗效果差而导致的难以满足使用要求的问题。
附图说明
15.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
16.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。
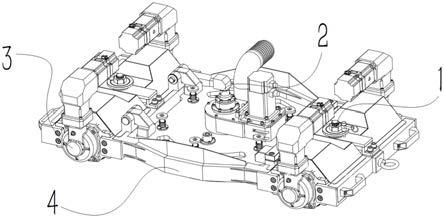
17.图1为本实用新型提供的一种爬壁清洗机器人系统的立体图;
18.图2为本实用新型提供的一种爬壁清洗机器人系统的清洗模块立体图;
19.图3为本实用新型提供的一种爬壁清洗机器人系统的前视图;
20.图4为本实用新型提供的一种爬壁清洗机器人系统的底架安装模块立体图;
21.图5为本实用新型提供的一种爬壁清洗机器人系统的磁吸附模块立体图;
22.图6为本实用新型提供的一种爬壁清洗机器人系统的清洗模块剖视图;
23.图7为本实用新型提供的一种爬壁清洗机器人系统的工作示意图;
24.图中:1磁吸附模块;11永磁体;12导向板;13安装板;14调节螺杆; 15限位套;2清洗模块;21冲洗装置;211伺服电机;212注水管;213空心转轴;214十字清洗盘;22回收装置;221真空回收管;222负压回收桶;223 弹性支架;224毛刷;3伺服驱动模块;31驱动电机;32减速机;33安装架; 331提手;332架体;333吊环;34变速箱;35麦克娜姆轮;4底架安装模块; 41底架梁;42锁定块;43翻盖;44压板;45旋转接头;46铰接座。
具体实施方式
25.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通
技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.如图1-7,本实用新型实施例提供了一种爬壁清洗机器人系统,包括磁吸附模块1、清洗模块2、伺服驱动模块3和底架安装模块4,所述清洗模块2 螺接固定在底架安装模块4中部,清洗模块2能够产生高压水流,冲洗船体表面,同时产生负压循环吸收清洗液,避免环境污染,同时负压也有利于稳定设备,使得底架安装模块4吸附在船体表面上,从而提高机器人作业的稳定性。所述底架安装模块4两端螺接固定有两个伺服驱动模块3,用来控制底盘的前进和移动方向。两个所述伺服驱动模块3上设置有两个所述磁吸附模块1。磁吸附模块1以间隙永磁体吸附的防止,使得爬壁清洗机器人,从而加强机器人在壁面移动的灵活性。
27.根据本实用新型提出的一个具体实施例,所述磁吸附模块1包括永磁体 11、导向板12、安装板13、调节螺杆14和限位套15,所述底架安装模块4 与安装板13的一端螺接固定,所述安装板13的另一端与导向板12螺接固定,所述导向板12内滑动设置有永磁体11,从而使得永磁体11上下调节移动,此外,永磁体11优选钕磁铁,从而得到足够的磁场强度。所述永磁体11与调节螺杆14的一端相连,所述调节螺杆14螺接插设在安装板13中部,所述调节螺杆14的另一端安装有限位套15,所述限位套15插设有定位销。调节螺杆14与安装板13形成螺旋副,因此通过转动调节螺杆14可以对永磁体11的位置进行调整,从而改变底架梁41与船舶外表面的吸附力,从而在最大兼顾机器人移动灵活性的调节下,起到防止爬壁机器人掉落的问题。
28.根据本实用新型提出的一个具体实施例,所述底架安装模块4包括底架梁 41、锁定块42、翻盖43、压板44、旋转接头45和铰接座46,所述安装板13 固定在底架梁41上,所述底架梁41的一侧设置有一对铰接座46,一对所述铰接座46与两个旋转接头45铰接,两个旋转接头45螺接固定在压板44上,所述压板44上固定有两个锁定块42,两个所述锁定块42与两个压板44相抵,两个压板44螺接固定在底架梁41上。在使用时,翻盖43通过旋转接头45 和铰接座46可以实现在底架梁41一侧旋转,从而方便拆卸维修清洗模块2,同时,压板44可以螺接固定在底架梁41上,由此,通过压板44与锁定块42 相抵,即可实现固定翻盖4的目的,从而提高了机器人整体的结构稳定性。
29.根据本实用新型提出的一个具体实施例,所述伺服驱动模块3包括驱动电机31、减速机32、安装架33、变速箱34、麦克娜姆轮35,所述底架梁41的两端与两个安装架33螺接固定,任意一个所述安装架33的上方对称设置有两个驱动电机31,驱动电机31与永磁体悬空设置,可以有效避免电机受到磁力影响而出现失效的问题。两个所述驱动电机31与两个减速机32传动连接,两个所述减速机32与两个变速箱34传动连接,两个所述变速箱34与两个所述麦克娜姆轮35传动连接,从而带动麦克娜姆轮35自由转动。在本套部件中共设置有四套驱动电机31,每个驱动电机31独立受到控制,从而输出不同的转速和转矩,并通过减速机32和变速箱34作用到四个不同的麦克娜姆轮35上,由此组成一个四驱移动系统,并由远程遥控控制不同麦克娜姆轮35组件,遥控器设置有四个档位,可根据不同工作状态随意调节档位。方位可向前、向后、向左、向右、左前、左后、右前、右后、右旋转、左旋转等十个方位任意方向移动。这样利用四个麦克娜姆轮35转速不同,即可使得机器人底盘原地转动甚至横向移动,显著提高了机器人移动的灵活性,从而提高效率,缩短作业时间,降低操作成本的
效果。
30.根据本实用新型提出的一个具体实施例,所述安装架33包括提手331、架体332和吊环333,所述底架梁41与架体332螺接固定,所述架体332的中部设置有吊环333,所述吊环333两侧位于架体332端部对称设置有两个提手331。提手331的作用在于便于整体搬运机器人使其附着到船体表面上,而吊环333位于机器人底盘的前后端,在吊环333上绑定尼龙绳,可避免机器人在垂直壁上意外脱落的问题,并避免由此导致的经济损失。
31.根据本实用新型提出的一个具体实施例,所述清洗模块2包括冲洗装置 21和回收装置22,所述翻盖43上固定安装有回收装置22,所述回收装置22 上安装有冲洗装置21。
32.根据本实用新型提出的一个具体实施例,所述回收装置22包括真空回收管221、负压回收桶222、弹性支架223和毛刷224所述翻盖43中部竖直固定设置有负压回收桶222,所述负压回收桶222与真空回收管221连通,所述负压回收桶222上滑动套设有弹性支架223,所述弹性支架223底部设置有毛刷 224。真空回收管221外接真空泵,从而使得负压回收桶222内产生负压并继而产生吸力,同时,负压回收桶222外壁上套设的弹性支架223和毛刷224 可以有效的处理顽固污渍,从而有利于下一步利用负压回收桶222内的高压水流冲洗,从而提高冲洗的洁净效果。工作时,先将高压泵高压水由胶管接入爬壁机器人进水口,进入负压回收桶222后接上真空回收管221,将爬壁清洗机器人移动至需要清洗位置,挂好防坠器。先启动真空回收装置与高压泵系统,待确认真空回收装置提供的负压正常,高压泵的高压供水管路水压正常后,方可打开高压供水阀对十字清洗盘214供水然后进行清洗作业。
33.远程操作遥控器,驱动爬壁清洗机器人移动,十字清洗盘214上装有24 个喷嘴在设定移动的的情况下十字清洗盘214高速旋转,此时高压水可轻易剥离物体表面油漆、铁锈等不易清除的物体,达到清洁目标物体表面的效果。毛刷224与固定板之间有6个压簧,在工作时,毛刷224仅仅的贴着工作表面,弹簧可以起到压紧和减震的作用,使负压回收桶222内部空间形成真空,以便更好的回收废水和废渣。
34.根据本实用新型提出的一个具体实施例,所述冲洗装置21包括伺服电机 211、注水管212、空心转轴213和十字清洗盘214,所述负压回收桶222轴心处设置有空心转轴213,由于负压回收桶222处于负压状态,而所述空心转轴 213一端与注水管212连通,所述空心转轴213另一端与十字清洗盘214连通,由此可以加强十字清洗盘214射出水流的压力,从而提高冲洗效果。而所述空心转轴213与伺服电机211传动连接,在冲洗的过程中空心转轴213带动十字清洗盘214转动,不仅可以提高冲洗的面积,还可以进一步提高水流的流速,由此进一步提高清洗效果。
35.本实用新型实施例的使用过程如下:
36.本实用新型公开了一种爬壁清洗机器人系统,其具体使用时,首先,扭动调节螺杆14调节永磁体11的位置,使得底架梁41吸附在船体表面,之后通过四个驱动电机31带动四个麦克纳姆轮35,并利用变速箱34改变各个麦克纳姆轮35的转速,从而使得冲洗装置21任意改变位置,最后开启冲洗装置 21,并向注水管212注水,真空回收管221通过真空泵向外排气,由此提高清洗效果。
37.本实用新型设计合理,操作简单,运行稳定,可以显著提高清洗效果,解决了现有技术中由于前现有的清洗机器人普遍存在清洗效果差而导致的难以满足使用要求的问题。
38.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但
在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。