1.本实用新型涉及探测技术领域,尤其涉及一种方便拆装的水下机器人用探测装置。
背景技术:
2.水下机器人也称无人遥控水下机器人,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,水下机器人上一般安装有各类观测设备进行水下监测和探索。
3.但是一般在安装方法是直接将探测装置用螺栓等方式固定在水下机器人上,长期浸泡在水中螺栓螺母生锈后,后期需要拆卸更换时需要费很大力气拧开螺栓,拆装极为不便,在水下机器人进入环境较为复杂的水域时,水草等杂物容易遮挡探头的拍摄与监测,不利于水域探测工作。
4.因此,有必要提供一种方便拆装的水下机器人用探测装置解决上述技术问题。
技术实现要素:
5.本实用新型解决的技术问题是提供一种拆装便捷、能自动清理探测阻碍物的水下机器人用探测装置。
6.为解决上述技术问题,本实用新型提供的方便拆装的水下机器人用探测装置,包括:固定安装在水下机器人顶部的安装板;内腔,所述内腔开设在所述安装板上;双向丝杆,所述双向丝杆设置在所述内腔内;腔室,所述腔室开设在所述内腔的底部内壁上;电机一,所述电机一固定安装在所述腔室内;两个同步轮,两个所述同步轮分别固定套设在所述双向丝杆上和所述电机一的输出轴上;同步带,所述同步带套设在两个所述同步轮上;两个嵌槽,两个所述嵌槽均开设在所述安装板的顶部;固板,所述固板设置在所述安装板的顶部;两个衔接板,两个所述衔接板均固定安装在所述固板的底部,两个所述衔接板分别延伸至两个所述嵌槽内;两个卡槽,两个所述卡槽分别开设在两个所述衔接板上;两个活动板,两个所述活动板均螺纹安装在所述双向丝杆上;亚克力罩,所述亚克力罩固定安装在所述固板的顶部。
7.优选的,所述内腔内固定安装有两个支板,所述双向丝杆贯穿两个所述支板并与两个所述支板转动连接。
8.优选的,所述内腔的顶部开设有滑槽,所述滑槽内固定安装有标杆,两个所述活动板的顶部均固定安装有滑块,所述标杆均贯穿两个所述滑块并与两个所述滑块滑动连接。
9.优选的,所述固板的顶部固定安装有基座,所述基座上开设有面槽,所述面槽内固定安装有电机二,所述面槽的顶部转动安装有调节杆,所述调节杆的底部与所述电机二的输出轴固定连接,所述调节杆的一侧上固定安装有探头。
10.优选的,所述亚克力罩的顶部固定安装有防护罩,所述防护罩的两侧内壁上固定安装有载板,所述载板的顶部固定安装有电机三,所述载板上转动安装有两个转轴,所述电
机三的输出轴与任意一个所述转轴固定连接。
11.优选的,两个所述转轴上均固定套设有齿轮,两个所述齿轮相啮合,两个所述齿轮上均固定安装有延长板,两个所述长板的一侧均延伸至所述防护罩外并与所述防护罩密封连接,所述延长板位于所述防护罩外的一侧上均固定安装有推板,两个所述推板上均固定安装有多个支杆。
12.与相关技术相比较,本实用新型提供的方便拆装的水下机器人用探测装置具有如下有益效果:
13.本实用新型提供一种方便拆装的水下机器人用探测装置,使用时,启动电机一,在同步带的传动作用下,两个同步轮转动,使得双向丝杆转动,两个活动板随之调节间距,直至进入或远离相应的卡槽,便可完成对探测装置的安装或拆卸,整个拆装过程简单快速,便于操作。
附图说明
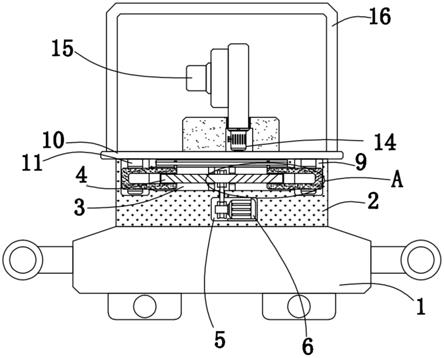
14.图1为本实用新型提供的方便拆装的水下机器人用探测装置第一实施例的主视示意图;
15.图2为图1所示的a部分的放大示意图;
16.图3为本实用新型提供的方便拆装的水下机器人用探测装置第二实施例的正视示意图;
17.图4为本实用新型提供的方便拆装的水下机器人用探测装置第二实施例中防护罩的俯视结构示意图。
18.图中标号:1、水下机器人;2、安装板;3、内腔;4、双向丝杆;5、腔室;6、电机一;7、同步轮;8、同步带;9、嵌槽;10、固板;11、衔接板;12、卡槽;13、活动板;14、电机二;15、探头;16、亚克力罩;17、防护罩;18、电机三;19、转轴;20、齿轮;21、推板。
具体实施方式
19.下面结合附图和实施方式对本实用新型作进一步说明。
20.第一实施例
21.请结合参阅图1
‑
图2,在本实用新型的第一实施例中,方便拆装的水下机器人用探测装置包括:固定安装在水下机器人1顶部的安装板2,安装板2起到将固板10与水下机器人1连接的作用;内腔3,所述内腔3开设在所述安装板2上,内腔3为双向丝杆4的转动和活动板13提供活动空间,双向丝杆4,所述双向丝杆4设置在所述内腔3内,双向丝杆4在转动时可使两个活动板13同时反向转动;腔室5,所述腔室5开设在所述内腔3的底部内壁上,腔室5对电机一6的安装提供空间并对其进行防护;电机一6,所述电机一6固定安装在所述腔室5内,使用电机一6作为动力源,运动较为稳定,且安装简便;两个同步轮7,两个所述同步轮7分别固定套设在所述双向丝杆4上和所述电机一6的输出轴上,使用同步轮7传动,传动效率高且有准确的传动比;同步带8,所述同步带8套设在两个所述同步轮7上,同步带8传动时不易滑动,传动范围大;两个嵌槽9,两个所述嵌槽9均开设在所述安装板2的顶部,两个嵌槽9为两个衔接板11提供安装位置,方便将衔接板11卡持;固板10,所述固板10设置在所述安装板2的顶部,固板10给予探头15和亚克力罩16提供支撑;两个衔接板11,两个所述衔接板11均固
定安装在所述固板10的底部,两个所述衔接板11分别延伸至两个所述嵌槽9内,两个衔接板11延伸至对应的嵌槽9内方便后续卡持固定;两个卡槽12,两个所述卡槽12分别开设在两个所述衔接板11上;两个活动板13,两个所述活动板13均螺纹安装在所述双向丝杆4上,两个活动板13均与两个卡槽12相适配,两个活动板13随双向丝杆4的转动调节间距;亚克力罩16,所述亚克力罩16固定安装在所述固板10的顶部,亚克力罩16采用透明亚克力材质,对探头15防护的同时不阻碍视线。
22.所述内腔3内固定安装有两个支板,所述双向丝杆4贯穿两个所述支板并与两个所述支板转动连接,两个支板对双向丝杆4提供可靠支撑力。
23.所述内腔3的顶部开设有滑槽,所述滑槽内固定安装有标杆,标杆对滑块起到限位作用使两个活动板13保持水平移动,两个所述活动板13的顶部均固定安装有滑块,所述标杆均贯穿两个所述滑块并与两个所述滑块滑动连接。
24.所述固板10的顶部固定安装有基座,所述基座上开设有面槽,所述面槽内固定安装有电机二14,电机二14位调节杆提供转动动力,使探头15可随之调节探测角度,所述面槽的顶部转动安装有调节杆,调节杆为探头15提供支撑,所述调节杆的底部与所述电机二14的输出轴固定连接,所述调节杆的一侧上固定安装有探头15。
25.本实用新型提供的方便拆装的水下机器人用探测装置的工作原理如下:
26.安装时,将固板10放置在安装板2的顶部,使两个衔接板11进入两个嵌槽9内,启动电机一6,输出轴转动,由于同步带8的传动作用,两个同步轮7同时转动,双向丝杆4随之转动,由于两个活动板13与双向丝杆4的螺纹关系并在标杆的限位作用下,两个活动板13开始向相互远离的方向移动,进入对应的嵌槽9内并移动至相对应的卡槽12内时,关闭电机一6,即可固定固板10与水下机器人1,使用时,水下机器人1进入相应水域后,启动电机二14便可使探头15转动调节以拍摄周围水域环境。
27.与相关技术相比较,本实用新型提供的方便拆装的水下机器人用探测装置具有如下有益效果:
28.使用时,启动电机一6,在同步带8的传动作用下,两个同步轮7转动,使得双向丝杆4转动,两个活动板13随之调节间距,直至进入或远离相应的卡槽12,便可完成对探测装置的安装或拆卸,整个拆装过程简单快速,便于操作。
29.第二实施例:
30.基于本技术的第一实施例提供的方便拆装的水下机器人用探测装置,本技术的第二实施例提出另一种方便拆装的水下机器人用探测装置。第二实施例仅仅是第一实施例的优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
31.下面结合附图和实施方式对本实用新型的第二实施例作进一步说明。
32.请结合参阅图3
‑
图4,方便拆装的水下机器人用探测装置还包括防护罩17,所述防护罩17固定安装在所述亚克力罩16的顶部,防护罩17为电机三18和齿轮20等后进行防护,所述防护罩17的两侧内壁上固定安装有载板,载板为电机三18和转轴19给予固定支撑,所述载板的顶部固定安装有电机三18,所述载板上转动安装有两个转轴19,转轴19给齿轮20可靠固定的同时为其提供转动动力,所述电机三18的输出轴与任意一个所述转轴19固定连接。
33.两个所述转轴19上均固定套设有齿轮20,两个齿轮20啮合传动较为稳定,两个延
长板通过两个齿轮20的带动下转动,两个所述齿轮20相啮合,两个所述齿轮20上均固定安装有延长板,两个所述长板的一侧均延伸至所述防护罩17外并与所述防护罩17密封连接,延长板的长度长于亚克力罩16,在转动时防止推板21被阻挡,所述延长板位于所述防护罩17外的一侧上均固定安装有推板21,两个所述推板21上均固定安装有多个支杆,设置多个支杆方便将杂物拨开,防止阻挡视线。
34.本装置中,进行水下探测工作发现视线被遮挡时,启动电机三18,转轴19转动,通过两个齿轮20的啮合关系,两个齿轮20向相反方向转动,同时两个推板21向相反方向转动,即可将遮挡视线的水草等阻挡拨开,扩大探测视野,提高探测质量。
35.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。