1.本发明涉及系泊链技术领域,特别是涉及一种海洋锚链清洁机器人。
背景技术:
2.锚链作为连接锚和船体或平台之间的链条,对传递和缓冲船舶或平台所受的外力起着重要的作用。锚链在使用中,其外表面通常会沾满污泥或其他杂物,因此,需要对锚链进行清洁。对锚链进行清洁的传统方式是将锚链收起,在将其进行收取时,通常在起锚的过程边起边进行冲洗,但是由于锚链的重量较大,从而在清洗会耗费极大的人力和物力,且清洗效率极差。因此,出现了对锚链进行维护的水下清洁技术。
3.目前的水下清洁技术主要通过水面母船提供电力、液压动力,依靠工作级rov辅助安装/移除。在入水前首先进行检查:锚链夹紧器、回转清理臂、高压水喷射器等。入水后第一步:将清理工具下放到需要清除污垢的位置;第二步:操作rov释放工具前端的绞车缆绳,在工具前端的大约30
‑
40米处,将缆绳挂钩连接到锚链上,用rov辅助清洗工具着陆并夹紧锚链,缆绳绞车可防止工具固定过程中向下滑动。第三步:清洗冲射臂落位,前方缆绳绞车控制工具的前进速度,前置的冲射臂可覆盖链节的不同方位;清理结束后,rov辅助从锚链上移除清理设备,再连同电液缆一并提升至母船甲板这一技术。此技术弊端居多,首先为了对准船舶锚链需要额外的rov机器人,且此技术不适用于湍急的海流,且清洗时间耗费多。
4.中国发明专利申请cn109552566a(公开日为2019年04月02日)公开了一种用于水下系泊链的清洗装置,其包括上固定板,下固定板,所述的上固定板沿其长度方向设置有t形槽a,下固定板沿其长度方向设置有t形槽b;所述的t形槽a和t形槽b组合形成走链十字轨道;上固定板和下固定板上均设置有高压水枪,上固定块的上方左侧设置有牵引动力系统,右侧设置有水下高压水泵系统;牵引电缆的一端与牵引动力系统相连接,另一端设置在采油平台上。该专利的清洗装置在使用时,放入水底后,使用rov机器人将清洗装置牵引到锚链底部链节,远程遥控清洗装置,打开十字轨道并调整十字轨道位置直至附着在链环上,再关闭十字轨道,打开喷射水枪,打开牵引装置,此时清洗装置会沿着牵引绳方向,逐节清洗系泊链环。该专利需要额外的rov机器人来牵引清洗装置,大大增加了清洁的时间,清洁效率低,并且水下环境复杂,特别是在海流湍急时,rov机器人辅助清洗装置难度较大,使用不方便。
技术实现要素:
5.本发明的目的是提供一种使用方便、效率高的海洋锚链清洁机器人。
6.为了实现上述目的,本发明提供了一种海洋锚链清洁机器人,包括高压喷水清洁机构和冲洗装置,所述高压喷水清洁机构包括推进装置、夹持机构和驱动机构,所述夹持机构包括安装座和两个机械臂,两个所述机械臂分别连接在所述安装座的两侧,所述驱动机构设于所述安装座上,所述驱动机构分别与两个所述机械臂连接以带动两个所述机械臂相互靠近或远离,所述推进装置和所述冲洗装置连接在所述安装座上。
7.作为优选方案,所述冲洗装置包括潜水泵,所述潜水泵连接在所述安装座上,且所述潜水泵的出水口位于所述两个所述机械臂之间;所述潜水泵包括马达、叶轮和依次连接的第一筒体、第二筒体和第三筒体,所述马达设于所述第一筒体内,所述马达的输出轴上同轴固定连接有动力杆,所述动力杆穿过所述第二筒体伸入所述第三筒体中,所述叶轮套装在所述动力杆上,所述叶轮位于所述第三筒体中,所述出水口设于所述第三筒体上,所述安装座上设有八个喷嘴,所述喷嘴与所述出水口连通,所述第二筒体为滤筒。
8.作为优选方案,所述机械臂包括依次连接的第一臂板、第二臂板和第三臂板,所述第一臂板与所述安装座的一侧可转动连接,所述第二臂板与所述第一臂板成钝角设置,所述第三臂板与所述第二臂板成钝角设置,且所述第二臂板和所述第三臂板朝靠近所述安装座的另一侧的方向延伸。
9.作为优选方案,所述驱动机构包括液压杆,所述液压杆设于所述安装座上,一个所述机械臂与一个所述液压杆的伸出端连接。
10.作为优选方案,所述机械臂与所述安装座可转动连接,所述机械臂上分别设有可沿其长度方向移动的连接筒,所述液压杆的伸出端与所述连接筒连接。
11.作为优选方案,所述安装座和所述机械臂上均设有第一清洁刷,且所述安装座上设有两个所述第一清洁刷,一个所述机械臂上设有四个所述第一清洁刷。
12.作为优选方案,所述推进装置包括第一螺旋桨,所述安装座的两侧各设置一个第一螺旋桨,所述第一螺旋桨的转轴与所述安装座平行。
13.作为优选方案,所述推进装置还包括第二螺旋桨,所述安装座上设有通孔,所述第二螺旋桨设于所述通孔中,所述安装座的两端对称设置有四个所述第二螺旋桨,所述第二螺旋桨的转轴与所述安装座垂直。
14.作为优选方案,还包括毛刷清洁机构和清洁装置,所述毛刷清洁机构的结构与所述高压喷水清洁机构的结构相同,其中,高压喷水清洁机构(100)的安装座设有用于潜水泵(200)安装的安装槽,毛刷清洁机构700的安装座没有所述安装槽,所述清洁装置包括第一清洁刷和第二清洁刷,所述毛刷清洁机构的安装座和机械臂上均连接有所述第二清洁刷,且所述毛刷清洁机构的安装座上设有八个所述第二清洁刷,所述毛刷清洁机构的一个机械臂上设有四个所述第一清洁刷和两个所述第二清洁刷,所述高压喷水清洁机构与所述毛刷清洁机构通过万向节连接。
15.作为优选方案,所述高压喷水清洁机构上还设有控制模块、通信模块、摄像头、陀螺仪和电池模块,所述冲洗装置、所述推进装置、所述驱动机构、所述通信模块、所述摄像头、所述陀螺仪与所述控制模块通讯连接,所述电池模块与所述冲洗装置、所述推进装置、所述控制模块、所述通信模块、所述摄像头、所述陀螺仪电连接。
16.与现有技术相比,本发明的有益效果在于:
17.本发明的清洁机器人通过在其高压喷水清洁机构上设置夹持机构,在入水后,驱动机构带动两个机械臂相互靠近,使高压喷水清洁机构套装在锚链上,并且高压喷水清洁机构上设置有推进装置,使高压喷水清洁机构可自主沿锚链移动,使高压喷水清洁机构上的冲洗装置可对锚链的每一个链环进行冲洗清洁,本发明的清洁机器人无需额外的rov机器人,可省去rov机器人牵引辅助的时间,提高效率,并且通过夹持机构可稳固连接在锚链上,避免被海流冲走,可适应复杂的水下环境,另外,夹持机构张开和闭合即可实现对锚链
的连接和松开,使用方便,且本发明的驱动机构结构简单,易维修,可以抓住多种尺寸的船锚链,适应性广泛。
附图说明
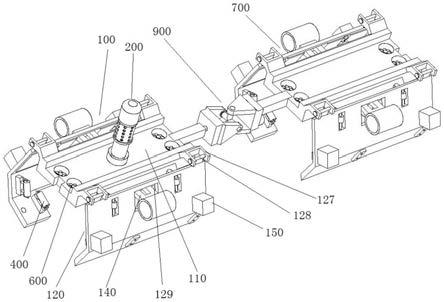
18.图1是本发明实施例的海洋锚链清洁机器人的第一视角结构示意图。
19.图2是本发明实施例的海洋锚链清洁机器人的第二视角结构示意图。
20.图3是本发明实施例的海洋锚链清洁机器人的正视图。
21.图4是本发明实施例的海洋锚链清洁机器人的侧视图。
22.图5是本发明实施例的海洋锚链清洁机器人的仰视图。
23.图6是本发明实施例的海洋锚链清洁机器人的俯视图。
24.图7是图6a
‑
a处的剖视图。
25.图8是本发明实施例的高压喷水清洁机构的安装座的剖视图。
26.图9是本发明实施例的万向节的结构示意图。
27.图10是本发明实施例的安装座的内部示意图。
28.图中,100
‑
高压喷水清洁机构;110
‑
安装座;111
‑
通孔;112
‑
容置腔;113
‑
移动孔;114
‑
液压油腔;115
‑
第一液压油道;116
‑
第二液压油道;117
‑
第三液压油道;120
‑
机械臂;121
‑
第一臂板;122
‑
第二臂板;123
‑
第三臂板;124
‑
连接筒;125
‑
长条孔;126
‑
连接杆;127
‑
连接块;128
‑
连接轴;129
‑
过孔;130
‑
液压杆;140
‑
支撑架;150
‑
电池模块;160
‑
液压叶轮;
29.200
‑
潜水泵;210
‑
马达;220
‑
叶轮;230
‑
第一筒体;240
‑
第二筒体;241
‑
进水孔;250
‑
第三筒体;260
‑
动力杆;
30.300
‑
喷嘴;400
‑
第一清洁刷;500
‑
第一螺旋桨;600
‑
第二螺旋桨;700
‑
毛刷清洁机构;800
‑
第二清洁刷;
31.900
‑
万向节;910
‑
第一支座;920
‑
第二支座;930
‑
第一中间轴;940
‑
第二中间轴;950
‑
第一支杆;960
‑
第二支杆。
具体实施方式
32.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
33.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
34.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
35.如图1至图10所示,本发明优选实施例的一种海洋锚链清洁机器人,包括高压喷水清洁机构100和冲洗装置,高压喷水清洁机构包括推进装置、夹持机构和驱动机构,夹持机构包括安装座110和两个机械臂120,两个机械臂120分别连接在安装座110的两侧,驱动机构设于安装座110上,驱动机构分别与两个机械臂120连接以带动两个机械臂120相互靠近或远离,推进装置和冲洗装置连接在安装座110上。本实施例的清洁机器人通过在其高压喷水清洁机构100上设置夹持机构,在入水后,驱动机构带动两个机械臂120相互靠近,使高压喷水清洁机构100套装在锚链上,并且高压喷水清洁机构100上设置有推进装置,使高压喷水清洁机构100可自主沿锚链移动,使高压喷水清洁机构100上的冲洗装置可对锚链的每一个链环进行冲洗清洁,本实施例的清洁机器人无需额外的rov机器人,可省去rov机器人牵引辅助的时间,提高效率,并且通过夹持机构可稳固连接在锚链上,避免被海流冲走,可适应复杂的水下环境,另外,夹持机构张开和闭合即可实现对锚链的连接和松开,使用方便,且本发明的驱动机构结构简单,易维修,可以抓住多种尺寸的船锚链,适应性广泛。
36.本实施例的冲洗装置包括潜水泵200,潜水泵200连接在安装座110上,且潜水泵200的出水口位于两个机械臂120之间。通过潜水泵200,使机器人可利用海水对锚链进行冲洗,无需接入水源。如图7所示,本实施例的潜水泵200包括马达210、叶轮220和依次连接的第一筒体230、第二筒体240和第三筒体250,马达210设于第一筒体230内,马达210的输出轴上同轴固定连接有动力杆260,动力杆260穿过第二筒体240伸入第三筒体250中,叶轮220套装在动力杆260上,叶轮220位于第三筒体250中,出水口设于第三筒体250上,安装座110上设有八个喷嘴300,喷嘴300与出水口连通,第二筒体240为滤筒。马达210工作时,带动动力杆260转动,进而带动叶轮220转动,从而使潜水泵200外的海水通过第二筒体240进入泵体中,并通过叶轮220将进入的海水带到出水口出,然后由喷嘴300喷出,对锚链进行冲洗。第二筒体240为滤筒,可过滤海水中的杂物,避免杂物进入泵体中损坏动力杆260和叶轮220。本实施例的第二筒体240上设有多个进水孔241,进水孔241的孔径较小,可防止杂物进入,起到过滤作用。
37.在本实施例中,机械臂120包括依次连接的第一臂板121、第二臂板122和第三臂板123,第一臂板121与安装座110的一侧可转动连接,第二臂板122与第一臂板121成钝角设置,第三臂板123与第二臂板122成钝角设置,且第二臂板122和第三臂板123朝靠近安装座110的另一侧的方向延伸,使两个机械臂120在夹持时可整个包夹住锚链,提高高压喷水清洁机构100与锚链的连接稳固性。本实施例的第三臂板123的长度小于第一臂板121和第二臂板122的长度,第二臂板122上连接有两个间隔设置的第三臂板123,且两个机械臂120上的第三臂板123错位设置,让高压喷水清洁机构100夹持住锚链时,形成套装在锚链外的筒状结构。
38.另外,如图8所示,本实施例的驱动机构包括液压杆130,液压杆130设于安装座110上,一个机械臂120与一个液压杆130的伸出端连接,通过液压杆130的伸缩带动两个机械臂120靠近或远离。进一步地,机械臂120与安装座110可转动连接,机械臂120上分别设有可沿其长度方向移动的连接筒124,液压杆130的伸出端与连接筒124连接。在夹持时,液压杆130缩回,带动机械臂120向靠近安装座110的方向转动,连接筒124向下移动;在松开时,液压杆130伸出,带动机械臂120向远离安装座110的方向转动,连接筒124向上移动;连接筒124的设置可增大液压杆130带动机械臂120转动的范围,使夹持机构具有较大的开合范围。在本
实施例中,第一臂板121上设有沿其宽度方向延伸的长条孔125,长条孔125中设有连接杆126,连接杆126套装在连接杆126上。此外,安装座110上连接有向外凸出的连接块127,第一臂板121通过连接轴128与连接块127可转动连接。
39.进一步地,安装座110和机械臂120上均设有第一清洁刷400,且安装座110上设有两个第一清洁刷400,一个机械臂120上设有四个第一清洁刷400,故高压喷水清洁机构100的机械臂120上共设有八个第一清洁刷400,整个高压喷水清洁机构100共设有十个第一清洁刷400。使高压喷水清洁机构100沿锚链移动的时候,第一清洁刷400与锚链接触进行洗刷,提高清洁程度。另外,本实施例的安装座110上的第一清洁刷400与安装座110可转动连接,机械臂120上的第一清洁刷400与机械臂120可转动连接,且第一清洁刷400连接有带动其转动的电机,提高清洁效率。另外,本实施例的安装座110上的第一清洁刷400的转轴与安装座110平行,机械臂120上的第一清洁刷400的转轴与机械臂120平行。
40.在本实施例中,推进装置包括第一螺旋桨500,安装座110的两侧各设置第一螺旋桨500,故高压喷水清洁机构100的安装座110上共设有两个第一螺旋桨500,第一螺旋桨500的转轴与安装座110平行。通过第一螺旋桨500的转动,可驱动高压喷水清洁机构100沿锚链移动。在本实施例中,第一臂板121上设有过孔129,第一螺旋桨500通过支撑架140与安装座110连接,支撑架140从过孔129中穿过。另外,推进装置还包括第二螺旋桨600,安装座110上设有通孔111,第二螺旋桨600设于通孔111中,安装座110的两端对称设置有四个第二螺旋桨600。第二螺旋桨600的转轴与安装座110垂直。通过控制第一螺旋桨500和第二螺旋桨600,可调整本实施例的清洁机器人的姿态,使清洁机器人保持平衡,可在海水中自由活动,更容易对准传播锚链,节省时间。本实施例的安装座110的两侧分别设有一个第一螺旋桨500,安装座110的两端分别设有两个第二螺旋桨700,即安装座110上设有六个螺旋桨。
41.此外,本实施例的清洁机器人还包括毛刷清洁机构700和清洁装置,毛刷清洁机构700的结构与高压喷水清洁机构100的结构相同,即毛刷清洁机构700同样具有与高压喷水清洁机构100相同的推进装置、夹持机构和驱动机构。应当说明的是,高压喷水清洁机构100的安装座设有用于潜水泵200安装的安装槽,毛刷清洁机构700的安装座没有上述安装槽。清洁装置包括第一清洁刷400和第二清洁刷800,毛刷清洁机构700的安装座和机械臂上均连接有第二清洁刷800,且毛刷清洁机构700的安装座上设有八个第二清洁刷800,毛刷清洁机构700的一个机械臂上设有四个第一清洁刷400和两个第二清洁刷800,故毛刷清洁机构700的两个机械臂上共设有八个第一清洁刷400和四个第二清洁刷800,而毛刷清洁机构700上共设有八个第一清洁刷400和十二个第二清洁刷800。同样地,毛刷清洁机构700的安装座上设置有四个第二螺旋桨600,毛刷清洁机构700的安装座的两侧分别设有一个第一螺旋桨500,共两个第一螺旋桨500,所以本实施例的机器人共设有四个第一螺旋桨500。高压喷水清洁机构100与毛刷清洁机构700通过万向节900连接。设置具有第二清洁刷800的毛刷清洁机构700,可对锚链进行洗刷,提高清洁效率。本实施例的毛刷清洁机构700与高压喷水清洁机构100的区别仅在于,高压喷水清洁机构100上设置了冲洗装置、毛刷清洁机构700上设置了第二清洁刷800。第二清洁刷800的刷头为盘状结构,且第二清洁刷800可绕其自身中心轴转动。毛刷清洁机构700的安装座上的第二清洁刷800的转轴与毛刷清洁机构700的安装座垂直,毛刷清洁机构700的机械臂上的第二清洁刷800的转轴与毛刷清洁机构700的机械臂垂直,因此,第一清洁刷400与第二清洁刷800的转动方向不同,与锚链的接触方向不同,可
全面洗刷锚链,提高清洁程度。第二清洁刷800连接有驱动其转动的电机。并且,高压喷水清洁机构100与毛刷清洁机构700通过万向节900连接,使清洁机器人整体呈柔性,使清洁机器人更加灵活,便于抓住多种形态的锚链。如图9所示,本实施例的万向节900包括第一支座910、第二支座920、第一中间轴930和第二中间轴940,第一支座910和第二支座920均为u型结构,第一中间轴930与第二中间轴940垂直连接成十字型结构,第一中间轴930的两端分别与第一支座910的两端可转动连接,第二中间轴940的两端分别与第二支座920的两端可转动连接,第一支座910通过第一支杆950与高压喷水清洁机构100的安装座110连接,第二支座920通过第二支杆960与毛刷清洁机构700的安装座连接。
42.本实施例的高压喷水清洁机构100上还设有控制模块、通信模块、摄像头、陀螺仪和电池模块150,冲洗装置、推进装置、驱动机构、通信模块、摄像头、陀螺仪与控制模块通讯连接,电池模块150与冲洗装置、推进装置、控制模块、通信模块、摄像头、陀螺仪电连接。电池模块150为清洁机器人供电;通信模块用于控制模块与海上控制平台建立联系,可通过海上控制机器人的运作,控制机械臂以及清洗功能的运转;摄像头可实时传输水下的影像至海上,便于对水下情况的把握;陀螺仪用于检测清洁机器人的姿态,便于清洁机器人平衡的控制。本实施例的电池模块150连接在第二臂板122上。
43.在本实施例中,如图10所示,安装座110内设有供液压杆130放置的容置腔112以及与容置,112相通的移动孔113,使液压杆130的活塞位于容置腔112中,液压杆130的杆体可通过移动孔113伸出和缩进。安装座110内还设有储存液压油的液压油腔114和连接液压油腔114与容置腔112的第一液压油道115,液压油腔114内设有带动液压油流动的液压叶轮160,当液压叶轮160转动时,液压油沿第一液压油道115在液压油腔114和容置腔115之间流动,以带动液压杆130伸缩。在本实施例中,安装座110的两端各设置了两个分别与两个机械臂120连接的液压杆130,且位于安装座110同一端的两个液压杆130的容置腔112相通,位于安装座110同一端的两个液压杆130的液压油腔114通过第二液压油道116连通,第二液压油道116通过第三液压油道117与该两个液压杆130的容置腔112均连通,使两个液压杆130的液压油之间可流通,便于分配。本实施例的液压杆130的液压油以及电池模块150通过电液缆与母船连接,由母船供应,保证工作。
44.本发明的工作过程为:将清洁机器人放在水下,通过摄像头传输水下的实时情况;控制驱动机构张开机械臂120;控制推进装置,使清洁机器人靠近锚链;再通过驱动机构控制机械臂120闭合,使清洁机器人套装在锚链上。启动冲洗装置、第一清洁刷400和第二清洁刷800,马达210工作,带动叶轮220转动,海水经过第二筒体240进入潜水泵200中,并传送到喷嘴300处喷出至锚链上,进行冲洗;第一清洁刷400和第二清洁刷800转动,对锚链进行洗刷。推进装置的第一螺旋桨600和第二螺旋桨700转动,使清洁机器人沿锚链移动,对锚链进行整体清洁。
45.综上,本发明实施例提供一种海洋锚链清洁机器人,其通过在其高压喷水清洁机构100上设置夹持机构,在入水后,驱动机构带动两个机械臂120相互靠近,使高压喷水清洁机构100套装在锚链上,并且高压喷水清洁机构100上设置有推进装置,使高压喷水清洁机构100可自主沿锚链移动,使高压喷水清洁机构100上的冲洗装置可对锚链的每一个链环进行冲洗清洁,本实施例的清洁机器人无需额外的rov机器人,可省去rov机器人牵引辅助的时间,提高效率,并且通过夹持机构可稳固连接在锚链上,避免被海流冲走,可适应复杂的
水下环境,另外,夹持机构张开和闭合即可实现对锚链的连接和松开,使用方便,且本发明的驱动机构结构简单,易维修,可以抓住多种尺寸的船锚链,适应性广泛。
46.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。