1.本实用新型属于竞赛机器人技术领域,具体涉及一种竞赛用水下机器人。
背景技术:
2.水下管道智能巡检机器人项目是工程训练大赛的一子项目,比赛规则如下:机器人比赛场地如图3所示,比赛时,机器人能够沿着水下管道运动,检测管道上的吸附物,并发出警报,并完成移除、回收等任务。任务执行过程中不允许使用包括遥控在内的任何人工交互的手段控制水中机器人及辅助装置。
3.目前实验设备中专门针对竞赛的实验设备较少,学生对于竞赛理解不足,同时为了更加高效、高完成度的完成竞赛任务。因此,我们提出一种适用于竞赛和教学用的水下机器人。
技术实现要素:
4.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种竞赛用水下机器人,它操控灵活,能实现巡线,并在巡线过程中识别、清理垃圾。
5.本实用新型所采用的技术方案是:一种竞赛用水下机器人,包括机体,所述机体中部两侧对称安装有水平安装架,水平安装架上固定连接有水平推进器,所述水平安装架两侧对称安装有垂直安装架,垂直安装架上远离水平安装架的一端固定连接有垂直推进器,所述机体前端中部通过连接安装架安装有视觉识别装置和抓取机构,所述视觉识别装置位于抓取机构的上方,所述抓取机构包括固定架和竖直设置的三组卡爪,三组卡爪分别位于固定架的顶部、中部和底部,三组卡爪通过连接杆在竖直方向上固定对齐,位于固定架顶部和底部的两组卡爪的端部设有相互啮合的齿轮,两组齿轮分别固定连接在固定架的顶部和底部,所述固定架上固定安装有驱动舵机,驱动舵机的输出轴与其中一个齿轮连接,所述固定架与连接安装架固定连接。
6.作为优选,所述机体由上壳、中壳和下壳拼接密封构成。
7.作为优选,所述视觉识别装置通过连接安装架固定在上壳前端中部。
8.作为优选,所述抓取机构通过连接安装架固定在下壳前端中部。
9.作为优选,所述视觉识别装置包括视觉识别摄像头和补光灯,补光灯位于视觉识别摄像头前侧。
10.作为优选,三组卡爪的外壁处还装有防护板。
11.作为优选,三组卡爪的内侧设有防滑凸棱。
12.本实用新型的有益效果在于:
13.(1)设置有单独控制的两个水平推进器和四个垂直推进器,能使机体在水中自由浮潜或水平移动,移动灵活度高;
14.(2)设置有视觉识别摄像头,便于识别水下管道和管道表面的各种异物;
15.(3)设置的补光灯,用于给识别摄像头补光照亮;
16.(4)通过舵机连接的卡爪,抓取灵活,且抓取稳定,对柱形垃圾清理效率更高。
17.本实用新型能在水中自由浮潜或平移,移动灵活,同时能通过视觉识别装置对水下管道及异物进行识别,并在识别后对水下管道表面的异物进行清理,能有效提高竞赛任务完成度及完成效率,并能在平时教学中进行演示。
附图说明
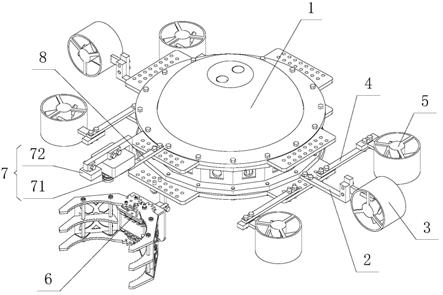
18.图1为本实用新型结构示意图;
19.图2为本实用新型抓取机构示意图;
20.图3为竞赛地图的俯视图。
21.图中:1、机体;2、水平安装架;3、水平推进器;4、垂直安装架;5、垂直推进器;6、抓取机构;7、视觉识别装置;8、连接安装架;61、固定架; 62、卡爪;63、连接杆;64、齿轮;65、驱动舵机;71、视觉识别摄像头;72、补光灯。
具体实施方式
22.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
23.实施例
24.如图1、图2和图3所示,本实施例提供的竞赛用水下机器人,包括机体 1,机体1由上壳、中壳和下壳密封拼接构成,
25.机体1内固定有主控器、压力传感器、温湿度传感器、电子罗盘、舵机控制器和六路电调控制器,舵机控制器用于控制抓取机构6的舵机,六路电调控制器用于控制两个水平推进器3和四个垂直推进器5;
26.所述机体1的下壳两侧中部对称安装有水平安装架2,水平安装架2上固定连接有水平推进器3,所述水平安装架2两侧对称设有垂直安装架4,垂直安装架4固定在机体1的下壳两侧中部的两端,所述垂直安装架4上远离水平安装架2的一端固定连接有垂直推进器5,所述机体1前端中部通过连接安装架8安装有视觉识别装置7和抓取机构6,所述视觉识别装置7固定在机体1 的上壳前端中部,抓取机构6固定在机体1的下壳前端中部,即视觉识别装置 7位于抓取机构6的上方,所述视觉识别装置7包括视觉识别摄像头71和补光灯72,补光灯72位于视觉识别摄像头71的前侧,补光灯72为视觉识别摄像头71提供照亮,使得视觉识别摄像头71拍摄更加清晰,从而更易进行识别;所述抓取机构6包括固定架61和竖直设置的三组卡爪62,三组卡爪62分别位于固定架61的顶部、中部和底部,三组卡爪62通过连接杆63在竖直方向上固定对齐,位于固定架61顶部和底部的两组卡爪62的端部设有相互啮合的齿轮64,两组齿轮64分别固定连接在固定架61的顶部和底部,所述固定架61 上固定安装有驱动舵机65,驱动舵机65的输出轴与其中一个齿轮64连接,所述固定架61与连接安装架8固定连接;三组所述卡爪62的外壁处还装有防护板;三组所述卡爪62的内侧设有防滑凸棱。
27.使用时,将机器人放置在水中竞赛地图的起点处,通过视觉识别装置7识别水下管道,并跟随水下管道进行行进,在行进过程中,视觉识别装置7识别水下管道表面存在的异物,识别后判断是否为待清理异物,若是,则停止水平推进器3工作,通过垂直推进器5使机体1下潜,下潜至垃圾处后,通过抓取机构6进行抓取,实现水下管道表面的异物清理。
28.以上所述仅是本实用新型优选的实施方式,但本实用新型的保护范围并不局限于
此,任何基于本实用新型所提供的技术方案和发明构思进行的改造和替换都应涵盖在本实用新型的保护范围内。
技术特征:
1.一种竞赛用水下机器人,其特征在于:包括机体(1),所述机体(1)中部两侧对称安装有水平安装架(2),水平安装架(2)上固定连接有水平推进器(3),所述水平安装架(2)两侧对称安装有垂直安装架(4),垂直安装架(4)上远离水平安装架(2)的一端固定连接有垂直推进器(5),所述机体(1)前端中部通过连接安装架(8)安装有视觉识别装置(7)和抓取机构(6),所述视觉识别装置(7)位于抓取机构(6)的上方,所述抓取机构(6)包括固定架(61)和竖直设置的三组卡爪(62),三组卡爪(62)分别位于固定架(61)的顶部、中部和底部,三组卡爪(62)通过连接杆(63)在竖直方向上固定对齐,位于固定架(61)顶部和底部的两组卡爪(62)的端部设有相互啮合的齿轮(64),两组齿轮(64)分别固定连接在固定架(61)的顶部和底部,所述固定架(61)上固定安装有驱动舵机(65),驱动舵机(65)的输出轴与其中一个齿轮(64)连接,所述固定架(61)与连接安装架(8)固定连接。2.根据权利要求1所述的一种竞赛用水下机器人,其特征在于:所述机体(1)由上壳、中壳和下壳拼接密封构成。3.根据权利要求2所述的一种竞赛用水下机器人,其特征在于:所述视觉识别装置(7)通过连接安装架(8)固定在上壳前端中部。4.根据权利要求2或3所述的一种竞赛用水下机器人,其特征在于:所述抓取机构(6)通过连接安装架(8)固定在下壳前端中部。5.根据权利要求1所述的一种竞赛用水下机器人,其特征在于:所述视觉识别装置(7)包括视觉识别摄像头(71)和补光灯(72),补光灯(72)位于视觉识别摄像头(71)前侧。6.根据权利要求1所述的一种竞赛用水下机器人,其特征在于:三组卡爪(62)的外壁处还装有防护板。7.根据权利要求1所述的一种竞赛用水下机器人,其特征在于:三组卡爪(62)的内侧设有防滑凸棱。
技术总结
本实用新型公开了一种竞赛用水下机器人,包括机体,所述机体中部两侧对称安装有水平安装架,水平安装架上固定连接有水平推进器,所述水平安装架两侧对称安装有垂直安装架,垂直安装架上远离水平安装架的一端固定连接有垂直推进器,所述机体前端中部通过连接安装架安装有视觉识别装置和抓取机构。本实用新型能在水中自由浮潜或平移,移动灵活,同时能通过视觉识别装置对水下引导线或异物进行识别,并在识别后对水下管道表面的异物进行清理,能有效提高竞赛任务完成度及完成效率,并能在平时教学中进行演示。学中进行演示。学中进行演示。
技术研发人员:霍雨佳 王津 缪伟杰 史颖刚 刘利
受保护的技术使用者:西北农林科技大学
技术研发日:2021.05.28
技术公布日:2021/12/28