1.本实用新型属于无人船技术领域,具体涉及一种无人船平衡及远程可视化监控装置。
背景技术:
2.无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,具有体量小、速度快、吃水浅的优势,其用途多为测绘、水文和水质监测。
3.授权公告号为cn 209441576 u的实用新型专利公开了一种用于无人船的智能平衡装置,船体内设有控制器、中央处理器、重心传感器,重心传感器与中央处理器有连接,中央处理器与控制器有连接,船体内前后两侧分别设有螺杆,螺杆左右两端分别螺纹安装螺母,螺母下方均设有配重块,螺母顶面分别固定连接伸缩杆固定端,伸缩杆活动端均与船体内壁固定连接,配重块移动能够抵消船体重心的位置变化,保持装置的平稳。该实用新型结构简单,能够及时调整船体重心,改善无人船工作时的平衡姿态,避免发生大角度倾斜甚至侧翻。
4.授权公告号为cn 109436233 b的发明专利,公开了一种无人监测船减摇装置船体的船首处设有破流体,在无人船行进过程中起到破浪的效果,降低波浪与船首处的船体接触,船体两侧均设有对应的减摇板,减摇板与收放机构配合连接,可对无人船行驶过程中无人船附近的波浪起到消除作用,提高无人船在水中的稳定性。
技术实现要素:
5.本实用新型的目的在于提供一种稳定性好、防侧翻、防倾覆、能够自扶正的,并且能耗低的无人船平衡及远程可视化监控装置。
6.本实用新型为实现上述目的所采取的技术方案为:
7.无人船平衡及远程可视化监控装置,包括船体,船体内配置有配重机构,配重机构包括配重块和传送组件,传送组件能够驱动配重块沿x向往返移动或沿z向往返移动;配重机构设置在船体的内部,通过传送组件移动配重块在船体内部的空间位置,以调整船体的重心位置。船体在水中受到水流或波浪的影响而摇摆时,可以沿x向调整配重块的横向位置,以平衡船体,增强稳定性,沿z向调节配重块在竖直方向上的高度,可以防止船体倾覆。一旦船体在大风大浪等恶劣环境中倾覆后,调节配重块在竖直方向上的高度,使船体的重心在竖直方向上远离浮心,倾覆后船体稳性差,难以继续维持倾覆状态,实现船体的自扶正。
8.船体的侧面配置有平衡机构,平衡机构包括平衡板、连接件和调节组件,连接件的一端设于船体的侧面,连接件的另一端通过连接轴与平衡板的一侧边缘相连,调节组件能够驱动平衡板绕连接轴转动;如此,平衡板能在一定范围内旋转,可以与水面形成一定的夹角。当平衡板与水面之间夹角较小时可以对水中的波浪起到消浪的作用,降低船体摇晃幅
度,增强稳定性,防止船体侧翻。当平衡板与水面之间接近垂直时,平衡板可以起到破流体的作用,提高船体的航行速度,降低能耗。将平衡板的前端设置为流线型尖端,增强破流效果,降低水流阻力。
9.传送组件、调节组件均与控制单元相连接;船体上配置有信息采集单元,信息采集单元包括配置于船体的重力传感器、加速度计,以及配置于平衡板的角度传感器;控制单元、信息采集单元均通过无线网络与远程监控单元通信连接。
10.采用上述技术方案,通过配重机构和平衡机构的配合实现船体的平衡,降低船体摇晃幅度,防止侧翻,增强稳定性,并能够应对极端环境,实现船体自扶正。通过信息采集单元实时采集船体的状态数据,经过数据转化可将相关信息反馈至远程监控单元,便于操作人员远程监控,分析船体的位置、航向、行驶速度以及稳定状态等。重力传感器测量由于重力引起的加速度,再结合加速度计采集的数据,可以计算出船体的倾斜角度,当该角度小于预设角度时,可以判断船体处于平稳状态,当该角度大于预设角度时,可以判断船体处于不平稳状态。分析重力传感器以及加速度计的数据,结合船体的运行状态,操作人员还可以根据实际状况通过远程监控单元向控制单元下达指令,操控船体的运行状态。角度传感器可以测量平衡板与水平面之间的夹角,可以辅助引导操作人员调整船体。
11.根据本实用新型一实施方式,传送组件包括沿x向延伸的第一导轨、沿z向延伸的第二导轨以及支撑板,第一导轨设置在支撑板上,配重块能够沿第一导轨往返移动,支撑板能够沿第二导轨往返移动。如此,可以实现配重块在一定空间内的位置调整。进一步的,第一导轨与第二导轨均可与导向杆配合使用,提高配重块移动方向的精准度,确保船体的处于平稳状态。
12.根据本实用新型一实施方式,第一导轨为x向延伸的丝杆,第二导轨为z向延伸的丝杆,配重块与第一导轨的螺母相配合,支撑板与第二导轨的螺母相配合,丝杆与伺服电机的输出端相连接,伺服电机与控制单元相连接。
13.根据本实用新型一实施方式,第一导轨为x向延伸的齿条,配重块设置有与第一导轨啮合的齿轮,第二导轨为z向延伸的齿条,支撑板设置有与第二导轨相啮合的齿轮,齿轮与伺服电机的输出端轴连接,伺服电机与控制单元相连接。
14.采用丝杆的螺杆与螺母的配合或者齿轮与齿条的配合,将伺服电机的旋转运动转化为配重块的直线运动,具有结构简单、动作灵敏的特点,并且可以实现精准定位,提高船体稳定性。
15.根据本实用新型一实施方式,调节组件包括电动滚轮和绳体,电动滚轮固定在船体的侧壁上,绳体的一端与电动滚轮相连,另一端与平衡板相连;电动滚轮与伺服电机的输出端相连,伺服电机与控制单元相连接。如此,伺服电机可以根据控制单元的指令驱动电动滚轮转动,对绳体或收或放,平衡板在绳体的带动下绕连接轴转动,从而可以根据无人船的行驶需要调节平衡板与水面之间的夹角。
16.船体处于停泊状态时,向下放绳体,使平衡板与水面之间夹角较小,可以起到消浪的作用。具体的,当平衡板与水面之间夹角在3
°
以内时,可以减弱水面波浪的翻动,减轻船体的摇晃,防止侧翻。船体航行时,使平衡板与水平之间夹角接近垂直,可以起到破浪的效果,降低阻力,降低能耗。
17.根据本实用新型一实施方式,平衡板包括活动翼和固定翼,活动翼通过旋转轴连
接在固定翼的后端,活动翼能够绕旋转轴转动;固定翼上一个靠近活动翼的边缘与连接轴滚动连接。如此,固定翼可以带动活动翼同步围绕连接轴转动。
18.船体在水面停泊时,使活动翼与固定翼在同一平面内延展,平衡板处于无弯折状态,固定翼在绕连接轴转动时可以带动活动翼在船体的侧面上下翻转,待平衡板与水面之间夹角较小时,可以起到消浪的作用。平衡板与水面的接触面积大,增加船体与水面的接触面积,防止船体晃动,增强稳定性。
19.船体行驶过程中,由于无人船的排水量较小,需要不断操作来维持航向。在船体两侧对称的设置平衡板,船体行驶过程中使固定翼与水平之间夹角接近垂直,活动翼绕旋转轴左右摆动,可以抗击水体对船体的冲击。在不发生偏转时,船体左右两侧的活动翼以相同频率和幅度往返转动,可大幅度增强船体的航向稳定性;而船体在一定角度内偏转时,分别调整船体两侧活动翼的转向和转速,可以不断调整船体的转向,增强船体的回转性,保持平稳航行。另一方向,活动翼左右摆动,提高排水量,可以提高船体的航行速度。
20.根据本实用新型一实施方式,船体的侧面配置有固定座,连接件上远离平衡板的一端与固定座转动连接。连接件转动,进而可以调节平衡板的位置,例如与船体的距离,以及伸入水下的深度等,保证船体的稳定。
21.根据本实用新型一实施方式,船体的侧面配置有凹槽,连接件可折叠,平衡板能够嵌入凹槽内。根据风浪的大小、船体的航行状态,将连接件折叠成不同的角度,以调整平衡板的位置,便于平衡板的功能正常。在船体航行时,将平衡板收进凹槽内进行收纳,减少阻力,提高行驶速度。
22.根据本实用新型一实施方式,连接件可伸缩。通过连接件的伸缩来调整平衡板位置。
23.进一步的,连接件为空心结构,平衡板也为空心结构。如此,可以降低船体整体重量,降低航行动力要求,节能环保。
附图说明
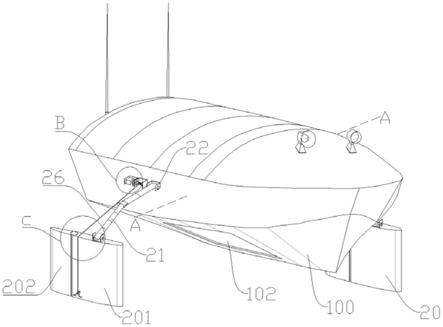
24.图1为本实用新型实施例1中无人船平衡及远程可视化监控装置的立体结构示意图;
25.图2为图1所示无人船平衡及远程可视化监控装置沿a
‑
a线的剖视图;
26.图3为图2所示无人船平衡及远程可视化监控装置中第一导轨的结构示意图;
27.图4为图1中b部的局部放大图;
28.图5为图1中c部的局部放大图;
29.图6为图1所示无人船平衡及远程可视化监控装置的平衡板的放大图;
30.图7为本实用新型实施例2中无人船平衡及远程可视化监控装置的连接件的结构示意图;
31.附图标号:船体100;船舱101;配重块10;第一导轨11;第二导轨12;支撑板13;第一导向杆14;第二导向杆15;固定板16;伺服电机7;连接件21;固定座22;突出部221;连接轴23;平衡板20;固定翼201;活动翼202;旋转轴203;连接座24;电动滚轮25;绳体26;凹槽102;重力传感器103;加速度计104;陀螺仪105;连接球27。
具体实施方式
32.以下结合具体实施方式和附图对本实用新型的技术方案作进一步详细描述:
33.实施例1:
34.图1~图6示意性的显示了根据本实用新型一实施方式的无人船平衡及远程可视化监控装置。如图所示,本装置包括船体100,船体100内部设有船舱101,船舱101内配置有可以在一定空间内移动的配重机构,包括配重块10和传送组件;船体100的侧面配置有可调节的平衡机构,包括平衡板20、连接件21和调节组件;传送组件、调节组件均与控制单元相连接;船体100上配置有信息采集单元,控制单元、信息采集单元均通过无线网络与远程监控单元通信连接,实现无人机的远程可视化监控。
35.具体的,传送组件包括第一导轨11、第二导轨12以及支撑板13。第一导轨11为沿x向延伸的丝杆,安装支撑板13上,支撑板13在船舱101的中央位置水平横向设置;第二导轨12为沿z向延伸的丝杆,第二导轨12套接在固定板16内,固定板16设置在船舱101底部。支撑板13上设有与第一导轨11的螺杆平行的第一导向杆14,船舱101右侧位置设有与第二导轨12的螺杆平行的第二导向杆15。配重块10与第一导轨11的螺母配合,并且套设在第一导向杆14的外面,支撑板13的左端与第二导轨12的螺母相配合,并且支撑板13的右端套设在第二导向杆15的外面,丝杆的螺杆与伺服电机7的输出端相连。
36.螺杆在伺服电机7的驱动下转动,驱动螺母沿螺杆直线往返移动。如此,配重块10能够沿第一导轨11在x向往返移动,支撑板13能够带动配重块10同步沿第二导轨12在z向往返移动,实现配重块10在一定空间内的移动,进而调整船体100的重心位置。配重块10移动过程中,通过第一导向杆14以及第二导向杆15的导向作用提高移动方向的准确度,保证对船体100重心的精准调整。
37.两组平衡机构对称的设置在船体100左右两侧,其中,连接件21为一可折叠的杆体,连接件21的一端与船体100的侧壁相连,另一端通过连接轴23与平衡板20的一个侧边转动相连,通过调节组件可以驱动平衡板20绕连接轴23转动。连接件21的杆体上,多个折叠连接的部分均可伸缩,可以调节整个连接件21长度,以及连接角度。
38.船体100的侧壁上设置有固定座22,连接件21上靠近船体100侧壁的一端与固定座22连接。具体的,固定座22上设有两个对称的突出部221,连接件21的末端卡在两个突出部221之间,并通过紧固螺栓固定。连接件21可以以紧固螺栓为轴转动,连接件21转动可以带动另一端的平衡板20调整位置,进而调整船体100的受力情况,保证船体100平衡。
39.连接件21可折叠,船体100侧壁设置有凹槽102,转动连接件21使其与凹槽102内壁相贴合,并将平衡板20绕连接轴23转动至适宜角度,可以将平衡板20收纳进凹槽102内,便于船体100航行,降低阻力,提高航速。平衡板20的左右侧面为流线型,其前端呈尖角,当平衡板20收入凹槽102时,平衡板20侧壁与船体100侧壁连接,从而船体100外观呈现流畅的流线型,降低航行阻力,节省动力。
40.平衡板20包括前后转动连接的固定翼201和活动翼202,活动翼202通过旋转轴203连接在固定翼201的后端,并且活动翼202能够绕旋转轴203转动,固定翼201上靠近活动翼202的一侧边缘固定设置有连接座24,连接座24套设在连接轴23外,并且连接座24能够绕连接轴23转动。
41.调节组件包括设置在船体100侧壁的电动滚轮25以及连接电动滚轮25与平衡板20
的绳体26。绳体26的一端与电动滚轮25相连,另一端与固定翼201上远离连接轴23的一侧边缘相连。伺服电机7可以根据控制单元的指令驱动电动滚轮25转动,收放绳体26,带动平衡板20绕连接轴23转动。
42.信息采集单元包括配置于船体100的重力传感器103、加速度计104、陀螺仪105,用于测定船体100的相对于水平面的倾斜角度;配置于平衡板20的角度传感器,用于测定平衡板20的倾斜角度;雷达系统,用于船体100的精准定位;声呐系统,用于测定水下障碍;等。信息采集单元将测定的信息反馈至远程控制单元。远程控制单元对接收的信息进行分析,确定船体100的航行状态,例如:停泊时船体100的倾斜方向以及角度、船体100的重心位置、航行时船体100的速度以及方向等。根据这些信息,操作人员可以通过远程监控单元向控制单元下达指令,控制单元根据指令操控不同位置的伺服电机7运作,调整船体100的状态,保证船体100处于稳定状态。
43.具体的,船体100停泊时,如若因水面波浪较大,导致船体100倾斜,可通过远程监控单元向控制单元下达指令,操控配重机构的伺服电机7运作,调整配重块10在第一导轨11上的位置,使重心重新在水平方向上向船体100中心位置移动,实现扶正。若船体100左右摇晃幅度大,控制单元根据远程监控单元的指令控制,驱动连接件21将平衡板20释放到水面,并调整平衡板20距离船体100的水平距离,以及平衡板20在水下的深度;操控电动滚轮25释放绳体26,使平衡板20转动到与水面之间的夹角足够小,降低甚至消除波浪对船体100的摇晃,提高船体100稳定性。如若因风浪太大,导致船体100倾覆,操控配重机构的伺服电机7运作,调整配重块10在第二导轨12上的位置,使船体100的重心在竖直方向上向船舱101底部移动,倾覆后的船体100稳定性变差,难以继续维持倾覆状态,实现船体100自扶正。
44.船体100航行时,可通过远程监控单元向控制单元下达指令,操控平衡机构的伺服电机7驱动电动滚轮25转动,收回绳体26,使平衡板20与水面之间接近垂直,平衡板20起到破流的作用,降低水流对船体100的阻力,节省动力。或者,操控连接件21将平衡板20收纳进船体100侧壁上的凹槽102内,降低空气阻力,提高航速。
45.实施例2:
46.图7示意性的显示了根据本实用新型另一实施方式的无人船平衡及远程可视化监控装置的连接件21。与实施例1的不同之处在于:
47.第一导轨11为x向延伸的齿条,配重块10上设置有与第一导轨11啮合的齿轮;第二导轨12为z向延伸的齿条,支撑板13上设置有与第二导轨12内核的齿轮,齿轮与伺服电机7的输出端轴向连接,伺服电机7与控制单元相连接。通过齿轮与齿条的配合实现配重块10的移动,进而调整船体100的重心位置。
48.固定座22内配置有连接球27,连接球27可以轴向转动,连接件21远离平衡板20的一端通过螺栓、连接板等与连接球27相连,并且连接件21的杆体能够绕连接球27转动。如此,可以进一步扩大连接件21的转动角度以及转动方向,实现平衡板20在更大范围内移动,根据风浪大小以及船体100航行需求调整位置,保持船体的稳定性。
49.在其他实施例中,连接件21还可以为一曲面板材,固定翼201与连接件21的一个末端通过铰接销轴铰接,平衡板20能够绕铰接销轴转动,铰接销轴即为连接轴23。
50.以上所述的实施例对本实用新型的技术方案进行了详细说明,应理解的是以上所述仅为本实用新型的具体实施例,并不用于限制本实用新型,凡在本实用新型的原则范围
内所做的任何修改、补充或类似方式替代等,均应包含在本实用新型的保护范围之内。