1.本发明属于水下航行器领域,特别是涉及一种基于压电驱动的夹心式结构多自由度深海航行器。
背景技术:
2.随着海洋经济的发展和军事需求的增加以及海洋石油天然气开发的迫切需求,水下航行器的理论与应用研究得到了迅猛的发展,航行器的数量和种类也显著增长,其中包括载人潜水器、自主水下航行器以及有缆遥控航行器等。
3.虽然航行器技术在理论研究和实际应用都已相对成熟,但结构尺寸大,噪声大,对环境扰动性差和造价成本昂贵等不足之处仍然存在。现有常见航行器进行深海探测时,为抵抗深水压,常需要设置钢体外壳和压力平衡装置,体积相对来讲比较庞大,并不适用于狭小海域的探测和取样。新型功能材料,例如采用形状记忆合金和介电弹性体制作的软体机器人,结构虽然可以微小型化,但是运动形式相对简单,不能实现多自由度,且造价成本高。有缆航行器采用缆线来传输航行器所需要的动力和控制信号,反馈传感信号,它续航力强,动力充沛,安全可靠性更高,数据传输能力强,市场占有率高,被广泛用于深水海域的探测。
技术实现要素:
4.本发明为了解决现有技术中的问题,提出一种基于压电驱动的夹心式结构多自由度深海航行器。
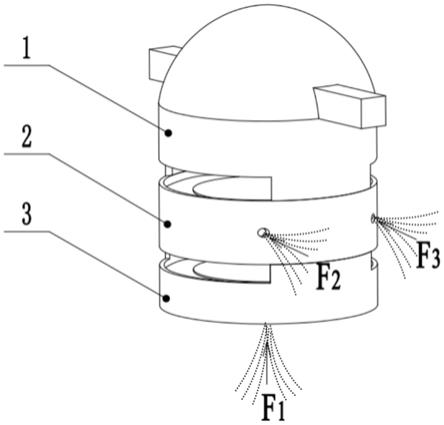
5.为实现上述目的,本发明采用以下技术方案:一种基于压电驱动的夹心式结构多自由度深海航行器,它包括浮力调控模块、中间旋转驱动模块和底部浮潜驱动模块,所述浮力调控模块的外壳为流线型,内腔为中空式结构并放置浮力材料,通过改变浮力材料的体积占比,进而控制深海航行器的初始浮沉状态;所述中间旋转驱动模块包括两个侧喷驱动单元,两个侧喷驱动单元上下分布,两个侧喷驱动单元内均设置有压电振子和侧喷喷水口,依靠压电振动引起腔体体积变化实现吸排水动作,从而实现深海航行器的旋转运动;所述底部浮潜驱动模块包括用于实现浮潜运动的浮潜驱动单元,浮潜驱动单元内设置有压电振子和底部直喷喷水口,浮潜驱动单元依靠压电振动引起腔体体积变化实现吸排水动作,从而实现深海航行器沉浮运动;所述浮力调控模块、中间旋转驱动模块和底部浮潜驱动模块依次竖直同轴紧固连接,构成夹心式结构。
6.更进一步的,所述中间旋转驱动模块包括第一压电振子、中间连接组件和第二压电振子,所述第一压电振子包括固定连接的第一压电陶瓷和第一振动膜片,所述中间连接组件的上方与第一压电振子固接构成v型侧喷腔体,所述第二压电振子包括固定连接的第二压电陶瓷和第二振动膜片,所述中间连接组件的下方与第二压电振子固接构成v型侧喷腔体,所述中间连接组件的壁面设置有侧喷喷水口,侧喷喷水口轴线与压电振子的轴线垂直,依靠压电振子振动引起腔体体积变化实现吸排水动作,从而实现深海航行器的转动,所述侧喷喷水口数量为一个或多个。
7.更进一步的,所述底部浮潜驱动模块的浮潜驱动单元包括第三压电振子和连接组件,所述第三压电振子包括固定连接的第三压电陶瓷和第三振动膜片,所述连接组件的上方与第三压电振子固接,内部形成收敛性结构的直喷腔体,所述连接组件轴线方向设置直喷喷水口,直喷喷水口轴线与深海航行器的中心线同轴。
8.更进一步的,所述中间旋转驱动模块和底部浮潜驱动模块中侧喷驱动单元和浮潜驱动单元的个数为n,n为大于等于一的正整数,所述侧喷驱动单元之间采用竖直轴向紧固连接,所述浮潜驱动单元之间采用水平紧固连接。
9.更进一步的,所述中间旋转驱动模块中的侧喷喷水口分布在中间连接组件的中心两侧且距旋转中心相等,两个侧喷驱动单元上的侧喷喷水口中心轴平行,底部浮潜驱动模块的直喷喷水口朝向深海航行器的沉浮方向。
10.更进一步的,所述压电振子与导线连接处做绝缘处理,出线口设置在深海航行器的底部。
11.更进一步的,所述中间旋转驱动模块和底部浮潜驱动模块通过调控内部压电振子的激励信号的波形、振幅、频率和占空比来控制侧喷喷水口和直喷喷水口的驱动性能,使水沿着喷口方向射流出去,由此控制深海航行器的航行和姿态。
12.更进一步的,通过选择性的调控中间旋转驱动模块中第一压电振子和第二压电振子的激励信号,控制深海航行器的运动状态,当第一压电振子通电,第二压电振子断电时,中间连接组件的上方侧喷单元具有驱动力,航行器顺时针转动;当第一压电振子断电,第二压电振子通电时,中间连接组件(2
‑
2)的下方侧喷单元提供动力,航行器逆时针转动;当第一压电振子和第二压电振子通相同激励信号时,两个侧喷驱动单元提供相同的驱动力,深海航行器直行。
13.更进一步的,通过选择性的调控底部浮潜驱动模块中第三压电振子的激励信号和协调控制航行器重力、浮力和驱动力三者之间的关系,改变深海航行器的沉浮运动状态,当控制底部浮潜驱动模块的驱动力与航行器浮力之和大于重力时,实现深海航行器的上浮;当控制底部浮潜驱动模块的驱动力与航行器浮力之和等于重力时,实现深海航行器的悬停;当控制底部浮潜驱动模块上直喷喷水口的驱动力与浮力之和小于重力时,实现深海航行器的下沉。
14.更进一步的,所述深海航行器与为其充电的充电母体构成多机协作系统,深海航行器位于充电母体底部,充电母体存放浮力块和供电电路,深海航行器与充电母体协同工作,实现深海航行器的作业范围调整,实现与充电母体自由脱离和结合,充电母体具有驱动能力,充电母体内多个深海航行器可以实现共同脱落,执行探测或者取样任务,深海航行器执行完任务后,与充电母体结合实现快速返航。
15.与现有技术相比,本发明的有益效果是:本发明解决了现有水下航行器在用于深海时结构尺寸大,造价成本高等方面的问题。提供了一种基于压电脉动射流原理的夹心式多自由度深海有缆航行器,本发明以夹心式结构为基本组成结构布置相应的压电驱动模块,通过协调改变各驱动单元内压电陶瓷的激励信号,进而控制振动形态,改变驱动特性,实现整体航行器的多自由度运动形式。本发明通过压电脉动射流的驱动技术,依托压电陶瓷的材料耐压特性和航行器的无密封结构,便可以实现航行器适用于深海环境且结构微小型化,达到厘米级,利于对深海狭小区域进行探测和取样。本发明采用模块化设计,便于零
件升级与维修,且造价成本低。
附图说明
16.图1为本发明所述的一种基于压电驱动的夹心式结构多自由度深海航行器立体结构示意图;
17.图2为本发明所述的一种基于压电驱动的夹心式结构多自由度深海航行器剖面结构示意图;
18.图3为本发明所述的浮力调控模块结构示意图;
19.图4为本发明所述的中间连接组件结构示意图;
20.图5为本发明所述的底部浮潜驱动模块排水动作示意图;
21.图6为本发明所述的底部浮潜驱动模块吸水动作示意图;
22.图7为本发明所述的深海航行器与充电母体协作示意图。
23.1:浮力调控模块,2:中间旋转驱动模块,3:底部浮潜驱动模块,4:充电母体,5:深海航行器,1
‑
1:外壳,1
‑
2:浮力材料,2
‑1‑
1:第一压电陶瓷,2
‑1‑
2:第一振动膜片,2
‑
2:中间连接组件,2
‑3‑
1:第二压电陶瓷,2
‑3‑
2:第二振动膜片,3
‑1‑
1:第三压电陶瓷,3
‑1‑
2:第三振动膜片,3
‑
2:连接组件。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。
25.参见图1
‑
7说明本实施方式,一种基于压电驱动的夹心式结构多自由度深海航行器,它包括浮力调控模块1、中间旋转驱动模块2和底部浮潜驱动模块3,浮力调控模块1的外壳1
‑
1为流线型,内腔为中空式结构并放置浮力材料1
‑
2,通过改变浮力材料1
‑
2的体积占比,进而控制深海航行器5的初始浮沉状态;中间旋转驱动模块2包括两个侧喷驱动单元,两个侧喷驱动单元上下分布,两个侧喷驱动单元内均设置有压电振子和侧喷喷水口,依靠压电振动引起腔体体积变化实现吸排水动作,从而实现深海航行器5的旋转运动;底部浮潜驱动模块3包括用于实现浮潜运动的浮潜驱动单元,浮潜驱动单元内设置有压电振子和底部直喷喷水口,浮潜驱动单元依靠压电振动引起腔体体积变化实现吸排水动作,从而实现深海航行器5沉浮运动;浮力调控模块1、中间旋转驱动模块2和底部浮潜驱动模块3依次竖直同轴紧固连接,构成夹心式结构。
26.在实施示例中,中间旋转驱动模块2包括第一压电振子、中间连接组件2
‑
2和第二压电振子,第一压电振子包括固定连接的第一压电陶瓷2
‑1‑
1和第一振动膜片2
‑1‑
2,中间连接组件2
‑
2的上方与第一压电振子固接构成v型侧喷腔体,第二压电振子包括固定连接的第二压电陶瓷2
‑3‑
1和第二振动膜片2
‑3‑
2,中间连接组件2
‑
2的下方与第二压电振子固接构成v型侧喷腔体,中间连接组件2
‑
2的壁面设置有侧喷喷水口,侧喷喷水口轴线与压电振子的轴线垂直,依靠压电振子振动引起腔体体积变化实现吸排水动作,从而实现深海航行器5的转动,侧喷喷水口数量为一个或多个,侧喷喷水口数量可按需设置。
27.在实施示例中,底部浮潜驱动模块3的浮潜驱动单元包括第三压电振子和连接组件3
‑
2,第三压电振子包括固定连接的第三压电陶瓷3
‑1‑
1和第三振动膜片3
‑1‑
2,连接组件
3
‑
2的上方与第三压电振子固接,内部形成收敛性结构的直喷腔体,连接组件3
‑
2轴线方向设置直喷喷水口,直喷喷水口轴线与深海航行器5的中心线同轴。
28.在实施示例中,中间旋转驱动模块2和底部浮潜驱动模块3中侧喷驱动单元和浮潜驱动单元的个数为n,n为大于等于一的正整数,侧喷驱动单元之间采用竖直轴向紧固连接,浮潜驱动单元之间采用水平紧固连接。本实施例中,中间旋转驱动模块2设置2个驱动单元,底部浮潜驱动模块3设置1个驱动单元。
29.在实施示例中,中间旋转驱动模块2中的侧喷喷水口分布在中间连接组件2
‑
2的中心两侧且距旋转中心相等,两个侧喷驱动单元上的侧喷喷水口中心轴平行,底部浮潜驱动模块3的直喷喷水口朝向深海航行器5的沉浮方向。
30.在实施示例中,压电振子与导线连接处做绝缘处理,出线口设置在深海航行器5的底部。中间旋转驱动模块2和底部浮潜驱动模块3通过调控内部压电振子的激励信号的波形、振幅、频率和占空比来控制侧喷喷水口和直喷喷水口的驱动性能,使水沿着喷口方向射流出去,由此控制深海航行器5的航行和姿态。
31.在实施示例中,通过选择性的调控中间旋转驱动模块2中第一压电振子和第二压电振子的激励信号,控制深海航行器5的运动状态,当第一压电振子通电,第二压电振子断电时,中间连接组件2
‑
2的上方侧喷单元具有驱动力f3,航行器顺时针转动;当第一压电振子断电,第二压电振子通电时,中间连接组件(2
‑
2)的下方侧喷单元提供动力f2,航行器逆时针转动;当第一压电振子和第二压电振子通相同激励信号时,f3=f2,两个侧喷驱动单元提供相同的驱动力,深海航行器5直行。
32.在实施示例中,通过选择性的调控底部浮潜驱动模块3中第三压电振子的激励信号和协调控制航行器重力、浮力和驱动力三者之间的关系,改变深海航行器5的沉浮运动状态,当控制底部浮潜驱动模块3的驱动力f1与航行器浮力之和大于重力时,实现深海航行器5的上浮;当控制底部浮潜驱动模块3的驱动力f1与航行器浮力之和等于重力时,实现深海航行器5的悬停;当控制底部浮潜驱动模块3上直喷喷水口的驱动力f1与浮力之和小于重力时,实现深海航行器5的下沉。
33.在实施示例中,深海航行器5与为其充电的充电母体4构成多机协作系统,深海航行器5位于充电母体4底部,充电母体4存放浮力块和供电电路,深海航行器5与充电母体4协同工作,实现深海航行器5的作业范围调整,实现与充电母体4自由脱离和结合,充电母体4具有驱动能力,充电母体4内多个深海航行器5可以实现共同脱落,执行探测或者取样任务,深海航行器5执行完任务后,与充电母体4结合实现快速返航。
34.以上对本发明所提供的一种基于压电驱动的夹心式结构多自由度深海航行器,进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。