1.本实用新型涉及无人技术领域,尤其涉及一种带水质检测、海上警示功能的无人船。
背景技术:
2.无人船是一种可以无须遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人。
3.随着社会的发展,人们常使用无人船对水质进行检测,目前大多数无人船的数据接口常暴露在外,设备在使用时,数据接口中易溅入水,致使其出现短路的情况,进而增加了无人船的损坏率,不利于无人机的正常使用,对此需要改进。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在大多数无人船的数据接口常暴露在外,设备在使用时,数据接口中易溅入水,致使其出现短路的情况,进而增加了无人船的损坏率,不利于无人机正常使用的缺点,而提出的一种带水质检测、海上警示功能的无人船。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种带水质检测、海上警示功能的无人船,包括主体、扩音器、预警灯、电机和保护装置,所述主体的表面固定连接有扩音器,所述主体的表面固定连接有预警灯,所述电机设置在主体的上方,所述保护装置设置在主体的表面上,所述保护装置包括转动块,所述转动块与主体的表面固定连接,所述转动块的表面转动连接有保护板,所述主体的表面固定连接有滑块,所述滑块的表面开设有圆孔,所述保护板的表面固定连接有限位套,所述限位套呈口字形设置,所述圆孔的内壁滑动连接有推杆,所述推杆与限位套的内壁插设连接。
6.优选的,所述滑块与推杆之间固定连接有拉动弹簧,所述拉动弹簧套设在推杆上。
7.优选的,所述主体的表面设置有清理装置,所述清理装置包括支撑架,所述支撑架与主体的表面固定连接,所述支撑架的表面开设有滑孔,所述电机与支撑架的表面固定连接。
8.优选的,所述电机的表面固定连接有主动齿轮,所述主动齿轮的表面采用砂纸打磨处理。
9.优选的,所述滑孔的内壁转动连接有驱动齿轮,所述驱动齿轮与主动齿轮的表面啮合连接,所述驱动齿轮的表面固定连接有限位环。
10.优选的,所述主体的表面固定连接有引导环,所述限位环的表面固定连接有清理刷,所述清理刷与引导环的内壁滑动连接。
11.与现有技术相比,本实用新型的优点和积极效果在于,
12.1、本实用新型中,通过设置保护装置,当无人船使用时,将无人船进行保护,转动保护板,保护板转动并压在主体上,松开推杆,推杆受到拉动弹簧的拉动,推杆移动并抵在
限位套上,完成保护,通过设置保护装置,便于将无人船进行保护,避免了大多数无人船的数据接口常暴露在外,设备在使用时,数据接口中易溅入水,致使其出现短路的情况,进而降低了无人船的损坏率,便于无人机的正常使用。
13.2、本实用新型中,通过设置清理装置,当无人船使用时,将预警灯进行清理,启动电机,主动齿轮转动并带动驱动齿轮,驱动齿轮转动并带动清理刷,清理刷转动并受到引导环的影响,完成清理,通过设置清理装置,便于将预警灯进行清理,避免了大多数的无人船在使用中预警灯的表面易积攒大量灰尘,遇到紧急状况时,预警灯无法完全进行警示操作,致使设备存在一定安全隐患的情况,进而提高设备的稳定性,提高设备的使用寿命。
附图说明
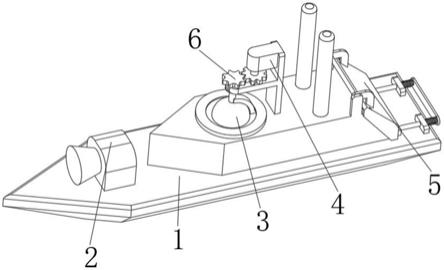
14.图1为本实用新型提出一种带水质检测、海上警示功能的无人船的立体结构示意图;
15.图2为本实用新型提出一种带水质检测、海上警示功能的无人船的后视结构示意图;
16.图3为本实用新型提出一种带水质检测、海上警示功能的无人船中保护装置的结构示意图;
17.图4为本实用新型提出一种带水质检测、海上警示功能的无人船中图3的a处结构示意图;
18.图5为本实用新型提出一种带水质检测、海上警示功能的无人船中清理装置的结构示意图;
19.图6为本实用新型提出一种带水质检测、海上警示功能的无人船中图5的b处结构示意图。
20.图例说明:1、主体;2、扩音器;3、预警灯;4、电机;5、保护装置;51、保护板;52、转动块;53、限位套;54、拉动弹簧;55、滑块;56、推杆;6、清理装置;61、主动齿轮;62、引导环;63、驱动齿轮;64、限位环;65、清理刷;66、支撑架。
具体实施方式
21.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
22.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
23.实施例1,如图1-6所示,一种带水质检测、海上警示功能的无人船,包括主体1、扩音器2、预警灯3、电机4和保护装置5,主体1的表面固定连接有扩音器2,主体1的表面固定连接有预警灯3,电机4设置在主体1的上方,保护装置5设置在主体1的表面上。
24.下面具体说一下其保护装置5和清理装置6的具体设置和作用。
25.如图1和图4所示,保护装置5包括转动块52,转动块52与主体1的表面固定连接,转动块52的表面转动连接有保护板51,主体1的表面固定连接有滑块55,滑块55的表面开设有
圆孔,保护板51的表面固定连接有限位套53,限位套53呈口字形设置,圆孔的内壁滑动连接有推杆56,推杆56与限位套53的内壁插设连接,推杆56可以限制保护板51。
26.滑块55与推杆56之间固定连接有拉动弹簧54,拉动弹簧54套设在推杆56上,拉动弹簧54可以拉动推杆56。
27.其整个保护装置5达到的效果为,通过设置保护装置5,当无人船使用时,将无人船进行保护,转动保护板51,保护板51转动并压在主体1上,松开推杆56,推杆56受到拉动弹簧54的拉动,推杆56移动并抵在限位套53上,完成保护,通过设置保护装置5,便于将无人船进行保护,避免了大多数无人船的数据接口常暴露在外,设备在使用时,数据接口中易溅入水,致使其出现短路的情况,进而降低了无人船的损坏率,便于无人机的正常使用。
28.如图1和图6所示,主体1的表面设置有清理装置6,清理装置6包括支撑架66,支撑架66与主体1的表面固定连接,支撑架66的表面开设有滑孔,电机4与支撑架66的表面固定连接,支撑架66可以支撑电机4。
29.电机4的表面固定连接有主动齿轮61,主动齿轮61的表面采用砂纸打磨处理,主动齿轮61可以带动驱动齿轮63。
30.滑孔的内壁转动连接有驱动齿轮63,驱动齿轮63与主动齿轮61的表面啮合连接,驱动齿轮63的表面固定连接有限位环64,限位环64可以限制驱动齿轮63。
31.主体1的表面固定连接有引导环62,限位环64的表面固定连接有清理刷65,清理刷65与引导环62的内壁滑动连接,清理刷65可以清理预警灯3。
32.其整个的清理装置6达到的效果为,通过设置清理装置6,当无人船使用时,将预警灯3进行清理,启动电机4,主动齿轮61转动并带动驱动齿轮63,驱动齿轮63转动并带动清理刷65,清理刷65转动并受到引导环62的影响,完成清理,通过设置清理装置6,便于将预警灯3进行清理,避免了大多数的无人船在使用中预警灯3的表面易积攒大量灰尘,遇到紧急状况时,预警灯3无法完全进行警示操作,致使设备存在一定安全隐患的情况,进而提高设备的稳定性,提高设备的使用寿命。
33.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。