1.本实用新型属于水面垃圾清理技术领域,尤其涉及一种太阳能式水面垃圾清理机器人。
背景技术:
2.日常生活和生产中产生的大量废弃物被排入江河湖海中,这些水面垃圾破坏视觉景观和水域的生态系统,恶化水体水质,尤其是在城市景观水域等小型水域,由于水循环不畅,水面垃圾无法及时排走,污染问题会愈发严重。针对小型水域的水面垃圾清理仍然以人工打捞为主,劳动量大、工作效率低。南京工程学院的张乐泉等人发明了一种水面垃圾清理机器人(授权公告号:cn 212766664 u),机器人打捞垃圾采用转动垃圾收集笼的方式,在工作时,打捞的垃圾随收集笼一同运动,无固定存放点,容易堵塞收集笼从而降低打捞率。深圳市朗驰欣创科技股份有限公司的鲜开义等人发明了用于自动清理水面垃圾的机器人(公告号: cn 206485528u)同上述机器人一样,机器人的续航能力有较大欠缺。现有的水面垃圾清理机器人打捞效率不足,续航不稳定,因此现开发一款使用可靠、续航稳定、绿色环保的太阳能式水面垃圾清理机器人。
技术实现要素:
3.针对现有技术中的存在的水面垃圾清理机器人续航能力不稳定,本实用新型的目的在于提供一种太阳能式水面垃圾清理机器人解决现有水面垃圾清理装置续航不稳定的问题。
4.为解决上述问题,本实用新型采用如下的技术方案:
5.一种太阳能式水面垃圾清理机器人,包括打捞工作装置、漂浮装置、收集装置、太阳能发电装置、运动装置;所述打捞工作装置包括左挡板,右挡板,动能传送带,打捞传送带,打捞盒,电机,传动大带轮,传动小带轮,传动轴,尾轴,输送带轮一,输送带轮二,输送带轮三,输送带轮四;所述漂浮装置,包括左浮筒,右浮筒;所述收集装置,包括主体一,垃圾篓;所述太阳能发电装置,包括主体二,太阳能发电板,蓄电池,控制装置一,控制装置二;所述运动装置,包括右推进器,左推进器。
6.在一些实施方式中,所述左挡板包括辅件一,角钢一,辅件二,角钢二,辅件三,角钢三;所述右挡板包括辅件四,角钢四,辅件五,角钢五,辅件六;左挡板的辅件一与角钢一固定连接,角钢一辅件二固定连接,辅件二与角钢二固定连接,角钢二与辅件三固定连接,辅件三与角钢三固定连接;右挡板的辅件四与角钢四固定连接,角钢四与辅件五固定连接,辅件五与角钢五固定连接,角钢五与辅件六固定连接。
7.在一些实施方式中,所述左浮筒与右浮筒固定在所述主体一上,并镜面对称;其中右浮筒包括排水几何体,上盖,角钢七,角钢八,角钢九,角钢十,角钢十一。
8.在一些实施方式中,所述主体一,上下开口;所述垃圾篓上端开口,下端和四周都开有小孔,左右两端还有设有外突翼。
9.在一些实施方式中,所述右推进器与所述左推进器镜面对称;其中所述左推进器,包括连接座,推进器外筒,推进电机,螺旋桨。
10.在一些实施方式中,所述电机,所述右推进器,所述左推进器,所述蓄电池,所述控制装置一,所述控制装置二用导线相连接。
11.在一些实施方式中,所述电机固定在所述角钢三上;所述角钢三固定在所述辅件三上;所述传动小带轮与所述电机铰接;所述传动大带轮与所述小带轮通过所述动能传送带相连接;所述传动轴与所述辅件三,所述辅件四铰接;所述输送带轮一,所述输送带轮二,所述传动大带轮固定在传动轴上;所述尾轴与所述辅件一,所述辅件六铰接;所述输送带轮三,所述输送带轮四固定在所述尾轴上;所述输送带轮一,所述输送带轮二,所述输送带轮三,所述输送带轮四用所述打捞传送带连接;所述辅件三与所述角钢二固定连接;所述角钢二与所述辅件二固定连接;所述辅件二与所述角钢一固定连接;所述角钢一与所述辅件一固定连接;所述辅件四与所述角钢四固定连接;所述角钢四与所述辅件五固定连接;所述辅件五与所述角钢五固定连接;所述角钢五与所述辅件六固定连接;所述打捞盒固定在所述打捞传送带上;所述排水几何体与所述上盖密封连接;所述角钢七,所述角钢九,所述角钢十一固定在所述上盖上;所述角钢八固定在所述角钢七,所述角钢九上;所述角钢十与所述角钢十一固定连接;所述角钢八与所述主体一螺栓连接;所述主体一与所述主体二螺栓连接;所述太阳能发电板与所述主体二螺栓连接;所述蓄电池与所述主体二通过螺栓连接:所述控制装置一与所述控制装置二与所述主体二通过螺栓连接;所述连接座与所述主体二螺栓连接;所述连接座与所述推进器外筒固定连接;所述推进电机与所述推进器外筒固定连接;所述推进电机与所述螺旋桨固定连接。
附图说明
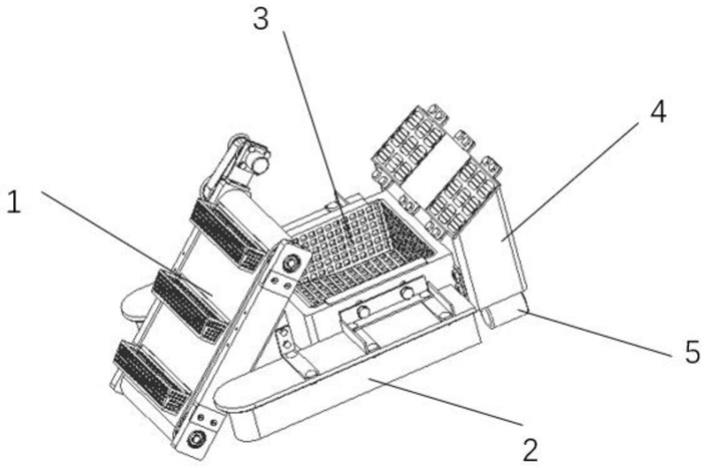
12.图1为本实用新型的整体结构图;
13.图2为本实用新型的打捞装置整体结构图;
14.图3为本实用新型的打捞装置的内部结构图;
15.图4为本实用新型的漂浮装置的浮筒分布及整体图;
16.图5为本实用新型的右浮筒结构图;
17.图6为本实用新型的收集装置结构图;
18.图7为本实用新型的太阳能发电装置外部整体和运动装置分布图;
19.图8为本实用新型的太阳能发电装置的内部结构图;
20.图9为本实用新型的左推进器结构图。
21.图中:1
‑
工作装置、2
‑
漂浮装置、3
‑
收集装置、4
‑
太阳能发电装置、5
‑
运动装置、101
‑ꢀ
左挡板、102
‑
右挡板、103
‑
动能传送带、104
‑
打捞传送带、105
‑
打捞盒、106
‑
电机、107
‑
传动大带轮、108
‑
传动小带轮、109
‑
传动轴、110
‑
尾轴、111
‑
输送带轮一、112
‑
输送带轮二、113
‑ꢀ
输送带轮三、114
‑
输送带轮四、115
‑
辅件一、116
‑
角钢一、117
‑
辅件二、118
‑
角钢二、119
‑ꢀ
辅件三、120
‑
角钢三、121
‑
辅件四、122
‑
角钢四、123
‑
辅件五、124
‑
角钢五、125
‑
辅件六、201
‑ꢀ
左浮筒、202
‑
右浮筒、203
‑
排水几何体、204
‑
上盖、205
‑
角钢七、206
‑
角钢八、207
‑
角钢九、 208
‑
角钢十、209
‑
角钢十一、301
‑
主体一、302
‑
垃圾篓、303
‑
垃圾篓翼、401
‑
主体二、402
‑ꢀ
太阳能发电板、403
‑
控制装置一、404
‑
蓄电池、405
‑
控制装置二、501
‑
右推进器、
502
‑
左推进器、503
‑
连接座、504
‑
推进电机、505
‑
螺旋桨、506
‑
推进器外筒。
具体实施方式
22.下面结合本实用新型实施例中的附图对本实用新型作进一步说明。
23.如摘要图所示,一种太阳能式水面垃圾清理机器人,包括打捞工作装置(1)、漂浮装置(2)、收集装置(3)、太阳能发电装置(4)、运动装置(5)。可实现太阳能充电,远程控制清理水面垃圾。所述打捞装置(1)安装在收集装置(3)前端;所述漂浮装置(2)安装在收集装置(3)两侧;所述太阳能发电装置(4)安装在收集装置(3)后端;所述运动装置(5)安装在太阳能装置(4)的下端。
24.如图7、8所示,所述太阳能充电,需将机器人放在阳光下,通过太阳能发电板(402) 接收太阳光进行发电,产生的电能通过导线储存在蓄电池(404)中。
25.如图1、2、3、4、5、6、7、8、9所示,所述远程控制清理水面垃圾,即蓄电池(404) 通过导线与控制装置一(403)、控制装置二(405)相连接;控制装置一(403)、控制装置二(405)与电机(106)、左推进器(502)、右推进器(501)通过导线相连接,蓄电池(404) 将电能传给控制装置(403)、控制装置(405),再通过控制装置(403)和控制装置(405) 传给电机(106)、左推进器(502)、右推进器(501),通过控制电流的输出来控制左推进器 (502)、右推进器(501)的转速和转向来控制机器人的前进,后退,转弯;通过控制输入电机(106)的电流来控制电机的转速;当电机(106)开始工作时,电机(106)带动传动小带轮(108)转动,小带轮(108)再带动动能传送带(103),使动能传送带面阳部分自下而上运动,动能传送带(103)再带动传动轴转动(109),传动轴(109)再带动打捞传送带(104) 运动,从而使打捞盒(105)运动,当打捞盒(105)运动到最高点之后,打捞物会应为重力掉落在垃圾篓(302)中,完成垃圾清理作业。