1.本实用新型涉及水面清洁技术领域,尤其涉及一种水上垃圾自动回收装置。
背景技术:
2.随着我国经济的快速发展,人民物质生活水平的大幅度提高,人们在日常生产、生活、旅行度假等过程中产生了各种大量的废弃物。由于民众环保意识淡薄,随意处置废弃物导致了江河、湖泊和港口等水体中飘浮着大量垃圾,严重破坏了水体生态环境、社会人文景观和自然环境。此外,江河、湖泊和港口等水体中飘浮着大量垃圾还会严重破坏了水体生态环境、社会人文景观和自然环境。
3.目前,对于水体面积较小的公园湖泊,水上漂浮垃圾清理方式大多采用人工打捞,不仅耗费人力,而且收集速度慢,效率低,而相关技术中的水上垃圾回收装置,体积庞大,维护成本高,设备使用专业性较强,对使用人员的专业性和技能要求较高,导致垃圾回收效率低下。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种水上垃圾自动回收装置,操作简单,维护成本低,能够提高垃圾回收的效率。
5.根据本实用新型的第一方面实施例的水上垃圾自动回收装置,其特征在于,包括:第一船体和第二船体,所述第一船体和所述第二船体之间设置有连接杆,所述第一船体和所述第二船体通过所述连接杆连接,所述第一船体和所述第二船体的头部之间设置有垃圾收集口,所述第一船体和所述第二船体的船身之间设置有垃圾收集通道,所述第一船体和所述第二船体的头部呈流线型,所述第一船体和所述第二船体的尾部分别与垃圾收集网连接,所述垃圾收集通道与所述垃圾收集网连通。
6.根据本实用新型实施例的水上垃圾自动回收装置,至少具有如下有益效果:本实用新型实施例中的水上垃圾自动回收装置,通过设置第一船体和第二船体的双体式船体设计,在双船体中间形成垃圾收集口和垃圾收集通道,第一船体和第二船体的头部采用流线型设计,使得垃圾收集口的大小大于垃圾收集网的网口的大小,以便垃圾直接经过垃圾收集通道流入垃圾收集网中,操作简单,维护成本低,能够提高垃圾回收的效率。
7.根据本实用新型的一些实施例,所述垃圾收集网的形状为心形状,心形状的所述垃圾收集网的底部为网口,所述垃圾收集网的网口分别与所述第一船体和所述第二船体的尾部连接。
8.根据本实用新型的一些实施例,还包括自动扎口装置和拉绳,所述垃圾收集网的网口设置有用于使所述垃圾收集网脱落并扎口的所述自动扎口装置,所述垃圾收集网的网口通过所述拉绳与所述第一船体的尾部或所述第二船体的尾部连接。
9.根据本实用新型的一些实施例,还包括底板,所述底板设置在所述第一船体和所述第二船体的下方,所述底板分别与所述第一船体和所述第二船体的底部连接。
10.根据本实用新型的一些实施例,还包括叶轮模组,所述连接杆设有多个,所述连接杆包括第一连接杆和第二连接杆,所述第一连接杆连接在所述第一船体和所述第二船体的头部之间,所述第二连接杆连接在所述第一船体和所述第二船体的尾部之间,所述叶轮模组设置在所述第二连接杆上,所述叶轮模组设置在所述底板的上方。
11.根据本实用新型的一些实施例,所述第一船体和所述第二船体的外侧分别设置有第一滚轮。
12.根据本实用新型的一些实施例,还包括触碰开关和用于驱动所述第一滚轮转动的驱动装置,所述触碰开关设于所述第一船体和所述第二船体的外侧,且所述触碰开关设于所述第一滚轮的下方,所述驱动装置设于所述第一船体和所述第二船体内。
13.根据本实用新型的一些实施例,还包括设在所述底板的头部的第二滚轮,所述第二滚轮设置在所述垃圾收集口以下。
14.根据本实用新型的一些实施例,所述连接杆为可调节伸缩程度的金属杆。
15.根据本实用新型的一些实施例,所述底板为薄钢板。
16.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
17.下面结合附图和实施例对本实用新型做进一步的说明,其中:
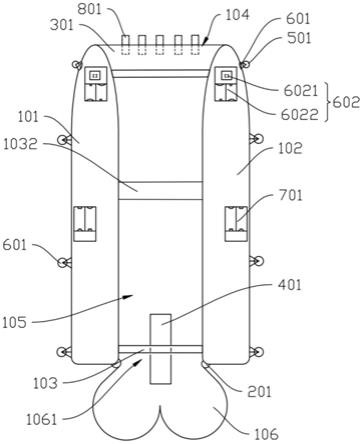
18.图1为本实用新型一些实施例提供的水上垃圾自动回收装置的结构示意图;
19.图2为本实用新型另一些实施例提供的水上垃圾自动回收装置的结构示意图;
20.图3为本实用新型一些实施例提供的叶轮模组的结构示意图。
21.附图标记:
22.第一船体101;第二船体102;连接杆103;第一连接杆1031;第二连接杆1032;垃圾收集口104;垃圾收集通道105;垃圾收集网106;网口1061;挂钩201;底板301;叶轮模组401;第一滚轮501;触碰开关601;驱动装置602;第一驱动马达6021;电池盒6022;第二驱动马达701;第二滚轮801。
具体实施方式
23.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
24.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.在本实用新型的描述中,若干的含义是一个以上,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所
指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
26.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
27.本实用新型的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
28.参照图1和图2所示,本实用新型实施例提供了一种水上垃圾自动回收装置(以下简称回收装置),包括第一船体101和第二船体102,第一船体101和第二船体102之间设置有连接杆103,第一船体101和第二船体102通过连接杆103进行可靠连接,第一船体101和第二船体102形成双体式船体设计,第一船体101和第二船体102的头部之间设置有垃圾收集口104,第一船体101和第二船体102的船身之间为垃圾收集通道105,第一船体101和第二船体102的头部呈流线型,垃圾收集口104成类似矩形前宽后窄的棱台式,以便于由于回收装置前进时形成的水流由缓变急流入垃圾收集口104中,以减缓水上垃圾与船头的碰撞,保护船体,水上垃圾进入垃圾收集口104后来到垃圾收集通道105中,由于回收装置的前进,垃圾逐渐向后移动,第一船体101和第二船体102的尾部分别与垃圾收集网106连接,以使垃圾收集通道105与垃圾收集网106连通,以便垃圾直接经过垃圾收集通道105流入垃圾收集网106中,本实用新型实施例中的第一船体101和第二船体102之间无其它器件,即垃圾收集通道105为一个无阻碍且畅通的通道,回收装置的电路等原件设置在两侧的船体上或船体内,方便了水上垃圾的回收,也提高了回收装置中电路的防水功能,提高了工作的稳定性,降低了维护成本。本实用新型实施例中的水上垃圾自动回收装置操作简单,维护成本低,能够自动收集水上漂浮的垃圾,提高垃圾回收的效率。
29.需要说明的是,在本实用新型的一些实施例中,第一船体101和第二船体102可采用空心塑料或泡沫,以减轻回收装置的重量,使其漂浮在水面上,在满足本实用新型实施例要求的前提下,第一船体101和第二船体102还可以为其它类型空心的材料制成,本实用新型不对其作具体限制。
30.参照图1和图2所示,在本实用新型的一些实施例中,垃圾收集网106的形状设计为心形状,心形状的垃圾收集网106的底部为网口1061,心形状的垃圾收集网106的头部中间具有凹陷设计,垃圾收集网106的网口1061两端分别与第一船体101和第二船体102的尾部连接,将垃圾收集网106设计成心形状,心形状底部与船尾连接。在一实施例中,垃圾收集通道105无多余的设备,在回收装置前进的过程中水流会流经垃圾收集口104、垃圾收集通道105再到垃圾收集网106中,垃圾由垃圾收集通道105进入垃圾收集网106后,将进入心形状的垃圾收集网106左右两侧,使得垃圾收集网106中间不会被垃圾填充,从而水流可以顺利通过收集网,减小了回收装置的行驶阻力,提高了回收装置在水上的工作效率。
31.在本实用新型的一些实施例中,水上垃圾自动回收装置还包括自动扎口装置(图中未示出)和拉绳(图中未示出),垃圾收集网106的网口1061设置有用于使垃圾收集网106脱落并扎口的自动扎口装置,垃圾收集网106的网口1061通过拉绳与第一船体101的尾部或
第二船体102的尾部连接,具体的,第一船体101和/或第二船体102的尾部设置有挂钩201,当自动扎口装置给垃圾收集网106进行扎口使其脱落时,垃圾收集网106通过拉绳固定挂在第一船体101或第二船体102尾部的挂钩201上,当垃圾收集网106内收满水上垃圾后,将无法再继续收集,此时需要对垃圾收集网106进行扎口并回到岸上进行处理,防止收集好的垃圾掉落,通过设置自动扎口装置和拉绳可以有效解决这个问题,在一实施例中,回收装置设定了扎口阻力,可以通过在挂钩201处设置拉力传感器等以测量垃圾收集网106的阻力变化,当垃圾收集网106受到阻力达到设定阻力时,垃圾收集网106将在自动扎口装置的作用下自行脱落并扎口,以防垃圾掉落,为了防止收集的垃圾位于水池中央,垃圾收集网106脱落后仍通过拉绳与第一船体101或第二船体102相连,并通过回收装置拖拽至岸边,方便工人打捞。
32.参照图1和图2所示,在本实用新型的一些实施例中,水上垃圾自动回收装置还包括底板301,底板301设置在第一船体101和第二船体102的下方,底板301分别与第一船体101和第二船体102的底部连接。本实用新型实施例为保证导流效果和垃圾不逃脱,在双体式船间一定水深处设置了底板301,可以为水上垃圾进入垃圾收集口104和垃圾收集通道105提供了导流作用,方便垃圾的自动收集。
33.参照图1和图2所示,在本实用新型的一些实施例中,针对水上垃圾的类型,诸如塑料垃圾袋此类的垃圾,容易挂在垃圾收集口104的问题,水上垃圾自动回收装置还包括设在底板301的头部的第二滚轮801,第二滚轮801设置在垃圾收集口104前缘水面以下,在一实施例中,第二滚轮801的数量可以为多个,以便于让垃圾顺利通过垃圾收集口104进入垃圾收集网106内,需要说明的是,在一实施例中,第二滚轮801可连接在底板301的入水口处,也可通过在第一船体101和第二船体102的头部连接连接杆103,并将第二滚轮801设置在该连接杆103处,以实现将第二滚轮801设置在底板301的头部,本实用新型不对其作具体限制。
34.在本实用新型的一些实施例中,为了保证垃圾顺利流进垃圾收集网106中,垃圾收集口104底部和两侧材料可采用表面较为光滑的材料,底板301为薄钢板,通过设置薄钢板,表面光滑,且相对较薄,有利于减少回收装置前进的阻力,减少垃圾收集通道105对垃圾的阻力,水上使垃圾顺利滑入垃圾收集网106中。在满足本实用新型实施例要求的前提下,底板301还可以为其它类型的材料,并具备表面光滑和薄的特点即可,本实用新型不对其作具体限制。
35.参照图1至图3所示,在本实用新型的一些实施例中,水上垃圾自动回收装置还包括叶轮模组401,连接杆103设有多个,连接杆103包括第一连接杆1031和第二连接杆1032,第一连接杆1031连接在第一船体101和第二船体102的头部之间,第二连接杆1032连接在第一船体101和第二船体102的尾部之间,叶轮模组401设置在第二连接杆1032上,本实用新型实施例中的水上垃圾自动回收装置采用叶轮式驱动,作为船体前进的动力来源,也是导致水上漂浮垃圾被迫收集的重要手段,叶轮模组401可以包括一个或多个叶轮组件,可根据动力的需要设置,叶轮模组401设置在二个船体之间靠近船尾位置,即设置在第二连接杆1032上,一方面叶轮式驱动可以驱动船体前进,另一方面,叶轮模组401转动时,二个船体之间将形成水流,水上漂浮垃圾可通过水流导入位于船体尾部的垃圾收集网106中,叶轮模组401设置在底板301的上方,以便在双船体之间形成水流,方便水上垃圾直接经过垃圾收集通道105进入垃圾收集网106中。
36.参照图1和图2所示,需要说明的是,在本实用新型的一些实施例中,连接杆103还可以设置多根,叶轮模组401可设置在回收装置靠后侧的连接杆103上,当第一船体101和第二船体102的长度较长时,可以根据结构需要设置多根连接杆103,本实用新型不对其作具体限制。
37.参照图1和图2所示,在本实用新型的一些实施例中,第一船体101和第二船体102的外侧分别设置有第一滚轮501。在回收装置行进过程中,一般第一船体101或第二船体102的船头会先碰到障碍,因此,在第一船体101和第二船体102的外侧分别设置第一滚轮501,当回收装置碰到障碍时,由于第一滚轮501的作用,回收装置将实现转向,从而避开障碍,并且,设置了第一滚轮501可以对第一船体101或第二船体102起到保护作用,避免了船体直接碰撞到障碍物。在满足本实用新型实施例要求的前提下,第一滚轮501可以设置为多个,第一滚轮501可沿着第一船体101或第二船体102的外侧依次设置,对船体起到避障和保护作用,在一实施例中,第一滚轮501设置在第一船体101和第二船体102的头部外侧,对船头起到保护作用。
38.参照图1和图2所示,在本实用新型的一些实施例中,水上垃圾自动回收装置还包括触碰开关601和用于驱动第一滚轮501转动的驱动装置602,触碰开关601设于第一船体101和第二船体102的外侧,且触碰开关601设于第一滚轮501的下方,驱动装置602分别设于第一船体101和第二船体102内,本实用新型实施例由第一滚轮501、触碰开关601和驱动装置602组成了绕障碍系统,将绕障碍系统设置在船头,当船头与障碍物接触时,会触发触碰开关601,驱动装置602开始工作,船体发生转向,以绕避障碍物。在一实施例中,在回收装置前端左右位置分别设置两个水平向的第一滚轮501,第一滚轮501由驱动装置602带动,驱动装置602驱动第一船体101上的第一滚轮501逆时针转,驱动装置602驱动第二船体102的第一滚轮501顺时针转,第一滚轮501轴下部设置触碰开关601,当第一滚轮501与障碍接触时,触碰开关601启动,回收装置发生转动,船头将在第一滚轮501转动下离开障碍,以达到绕避障碍的目的。在一实施例中,触碰开关601可以为压力传感器,驱动装置602可以包括相互连接的第一驱动马达6021和电池盒6022,电池盒6022为第一驱动马达6021提供了电源,第一驱动马达6021驱动第一滚轮501转动,电池盒6022内装有锂电池,第一驱动马达6021由锂电池供电,第一驱动马达6021和电池盒6022均做防水处理,可在其表面包裹一层防水层,或涂刷防水油漆,驱动装置602可以设置在第一船体101和第二船体102内,也可以设置在第一船体101和第二船体102上方,本实用新型不对其作具体限制。
39.在本实用新型的一些实施例中,连接杆103为可调节伸缩程度的金属杆,通过设置可调节伸缩程度的金属杆,以调节连接杆103的长度,从而可以调节第一船体101和第二船体102之间的间距,即垃圾收集通道105的宽度,金属杆能保证双体式船体的整体性和稳定性。
40.参照图1和图2所示,需要说明的是,在本实用新型的一些实施例中,为了弥补叶轮模组401驱动力的不足,为了达到一定的动力,可在第一船体101和第二船体102内设置第二驱动马达701,在第一船体101和第二船体102之间可设置备用叶轮(图中未示出),以便在双船体之间形成水流,备用叶轮由第二驱动马达701驱动,当垃圾收集网106回收的垃圾逐渐增大时,回收装置所遇到的阻力变大,会使得回收装置行驶变慢,为了提高行驶的动力,设置第二驱动马达701来驱动备用叶轮,提高了回收装置的动力,在一实施例中,第二驱动装
置602设置在第一船体101和第二船体102内部,也可以设置在第一船体101和第二船体102上方,并做防水处理,与上述实施例中的第一驱动马达6021类似,第二驱动马达701也可与电池盒6022连接,并由锂电池供电,也可单独设置一个电池来供电,本实用新型不对其作具体限制。
41.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。此外,在不冲突的情况下,本实用新型的实施例及实施例中的特征可以相互组合。