1.本实用新型涉及无人船技术领域,具体涉及一种全回转双体无人船。
背景技术:
2.随着技术的发展,无人船也越来越受到重视,但现有传统无人船(一般为单体船型)存在稳定性不高、回转半径大,不适合在在码头自主靠泊以及在狭小水域作业、甲板面积有限不利于搭载较大体积的任务设备、通讯距离短等不足。
技术实现要素:
3.本实用新型提出的一种全回转双体无人船,可解决上述技术问题。
4.为实现上述目的,本实用新型采用了以下技术方案:
5.一种全回转双体无人船,包括船体,船体上设有控制器以及分别与控制器连接的通讯系统、导航系统、动力系统、推进系统和避障系统;
6.船体采用双体结构,单片体之间由连接桥连接。
7.进一步的,导航系统包括dgps导航设备、磁罗经和陀螺惯性导航设备;
8.其中dgps导航设备包括dgps天线位于桅杆顶部;
9.陀螺惯性导航设备包括两个惯性导航天线,分别位于船体艏、艉部。
10.进一步的,所述通讯系统包括数传电台、3g/4g/5g通讯设备和系留无人机,其中数传电台天线、3g/4g/5g通讯天线安装在无人船艏部,系留无人机安装于无人船艉部。
11.进一步的,所述动力系统包括电池组、全回转推进器、艏侧推,全回转推进器分别设在两个片体尾部,艏侧推设在右片体艏部,推进器、艏侧推分别与控制器连接,电池组为全船设备供电。
12.进一步的,避障系统包括分别与控制器连接的毫米波雷达、x波段雷达和ais 避障设备,ais避障设备设在船体艏部,毫米波雷达分别设于船体船舯、首、尾部;
13.船体设有告警设备和摄像设备。
14.进一步的,船体甲板中部设有月池,可供无人船执行海洋测绘、水质取样、警戒巡逻等任务时搭载任务模块。
15.进一步的,电池组位于船体两侧内部,推进器分别位于左、右舷艉部,艏侧推位于右舷艏部。
16.进一步的,推进器装有全回转电机作为转向机构,在收到控制器航行命令后,可按指令航行或避障;在收到码头靠港指令后,推进器旋转180
°
,同时艏侧推打开,可与推进器配合实现横移靠港。
17.进一步的,船体在桅杆处设有桅灯、前视摄像头、后视摄像头,在船体两侧设有左舷航行灯、右舷航行灯;
18.双摄像头随时监控船舶周围海况,遇到险情随时干预船舶航行,航行灯和桅灯在夜间航行时为附近船舶发出告警,提示附近船舶有船经过。
19.进一步的,在船体内部设有电池管理系统,用于电池组的安全管理,避免火灾的发生。
20.由上述技术方案可知,本实用新型的全回转双体无人船,采用双体船结构,增加了甲板面积,可以搭载更多的任务模块,同时具有更好的稳性,便于执行多种任务。通过全回转推进器与侧推的配合,可以做到原地转向,增加了在狭窄水域作业的能力,同时,通过控制器对通讯、导航、动力、避障等系统的统一管理,能够实现无人船的自主航行以及自主靠泊。
21.该无人船稳定性好、操纵性强,适合狭窄水域探测及巡逻任务。
附图说明
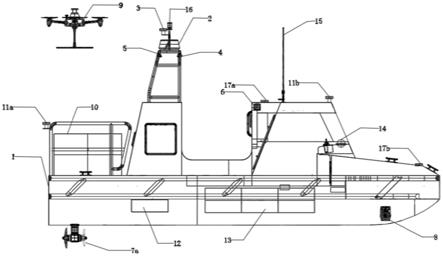
22.图1是本实用新型的侧视示意图;
23.图2是本实用新型的俯视示意图;
24.图3是本实用新型的前视示意图;
25.附图标记解释1、船体,2、x波段雷达,3、dgps天线,4、前视摄像头, 5、后视摄像头,6、右舷航行灯,7a、第一推进器,7b、第二推进器8、艏侧推,9、系留无人机,10、系留无人机控制箱,11a、第一惯性导航天线,11b、第二惯性导航天线,12、bms,13、电池组,14、磁罗经,15、数传电台天线, 16、桅灯,17a、第一毫米波雷达,17b、第二毫米波雷达,17c、第三毫米波雷达,17d、第四毫米波雷达,18、dgps设备,19、3g/4g/5g通信设备,20、 ais设备,21、左舷航行灯,22、任务模块,23、月池,24、vhf数传电台, 25、控制器,26、连接桥,27、3g/4g/5g通信天线,28、惯性导航设备。
具体实施方式
26.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
27.如图1所示,本实施例所述的全回转双体无人船,包括船体,船体上设有控制器以及分别与控制器连接的通讯系统、导航系统、动力系统、推进系统和避障系统;船体采用双体结构,单片体之间由连接桥连接。
28.船体长为7.5m、宽为2.3m、吃水为0.4m;连接桥宽度为0.8m。
29.船体设有左右两个片体,片体宽度为0.75m。
30.导航系统包括dgps导航设备、磁罗经和陀螺惯性导航设备。
31.通讯系统包括数传电台、3g/4g/5g通讯设备19和系留无人机,其中数传电台天线、3g/4g/5g通讯天线27安装在无人船艏部,系留无人机安装于无人船艉部。
32.动力系统包括电池组、全回转推进器、艏侧推,全回转推进器分别设在两个片体尾部,艏侧推设在右片体艏部,推进器、艏侧推分别与控制器连接,电池组为全船设备供电;
33.避障系统包括分别与控制器连接的毫米波雷达、x波段雷达和ais避障设备, ais避障设备设在船体艏部,毫米波雷达分别设于船体船舯、首、尾部;船体设有告警设备和摄像设备;
34.船体甲板中部设有月池,可供无人船执行海洋测绘、水质取样、警戒巡逻等任务时
搭载任务模块。
35.以下结合附图,具体说明:
36.如图1
‑
图3所示,本实施例的一种双体无人船,包括船体1,船体长为7.5m,宽为2.3m,吃水为0.4m,船体采用双体结构,由连接桥26连接,连接桥宽0.8m, 连接桥上设有月池23,可搭载任务载荷模块22。双体结构能使船舶具有更好的稳性,同时为船舶提供更宽敞的甲板,搭载更多的任务载荷。
37.控制器25统一管理通讯、导航、动力、避障等系统设备,通过各设备的反馈数据对各设备发送控制指令。
38.通讯系统包括安装在船艏的vhf数传电台24,3g/4g/5g通讯设备19和安装于船艉的系留无人机9,其中数传电台天线15、3g/4g/5g通讯天线27安装在无人船艏部,系留无人机和无人机控制箱10通过电缆连接安装于无人船艉部。前2种通讯设备适用于日常数据传输,系留无人机用于远距离数据传输。
39.导航系统包括dgps导航设备18、磁罗经14和惯性导航设备28,其中dgps 天线3位于桅杆顶部,第一惯性导航天线11a,第二惯性导航天线11b分别位于船体艏、艉部。导航系统为船舶自主航行提供船体的姿态、位置、加速度、航速等信息。
40.避障系统包括第一毫米波雷达17a,第二毫米波雷达17b,第三毫米波雷达 17c,第四毫米波雷达17d、x波段雷达2和ais设备20。毫米波雷达分布于船体的前、后、左、右,x波段雷达位于桅杆上层,ais位于船体艏部。通过三中设备的配合,避障系统可以实现全方位监测船舶周围环境,为船舶避障以及自主靠泊提供保障。
41.动力系统包括电池组13、全回转推进器7a,7b、艏侧推8。电池组位于船体两侧内部,推进器分别位于左、右舷艉部,艏侧推位于右舷艏部。推进器装有全回转电机作为转向机构,在收到控制器航行命令后,可按指令航行或避障;在收到码头靠港指令后,推进器旋转180
°
,同时艏侧推打开,可与推进器配合实现横移靠港。
42.船体在桅杆处设有桅灯16、前视摄像头4、后视摄像头5,在船体两侧设有左舷航行灯21、右舷航行灯6。双摄像头可随时监控船舶周围海况,遇到险情可随时干预船舶航行,航行灯和桅灯可在夜间航行时为附近船舶发出告警,提示附近船舶有船经过。
43.本船在船体内部设有电池管理系统12,可用于电池组的安全管理,避免火灾的发生。
44.由上述技术方案可知,本实用新型的全回转双体无人船,采用双体船结构,增加了甲板面积,可以搭载更多的任务模块,同时具有更好的稳性,便于执行多种任务。通过全回转推进器与侧推的配合,可以做到原地转向,增加了在狭窄水域作业的能力,同时,通过控制器对通讯、导航、动力、避障等系统的统一管理,能够实现无人船的自主航行以及自主靠泊。
45.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。