1.本发明属于水面保洁和无人船自主驾驶领域,尤其涉及一种三船协同的自动驾驶无人水面漂浮物清洁船。
技术背景
2.河道湖泊是城市自然资源的重要组成部分,然而水域环境中垃圾的堆积会造成城市水环境的污染,进而对人体、工农业生产和生态环境造成不可估量的危害。因此,加强水域环境的清洁管理,对保护城市生态文明具有非常重要的现实意义。传统的城市水域环境清洁主要通过人工收集垃圾的模式,该模式对于人员的依赖性极大,并且效率低下。
3.基于自动驾驶的方法可以在最小化人工需求的情况下实现水域环境的清洁。一些基于半自动的多体船以及全自动的单体船已经得到了应用,而这些方法在实际的清洁过程中依然存在着对于人员的高依赖性和垃圾清洁的低效性,难以获得良好的实践效果。近年来,由于深度学习和多体协同等相关技术的发展,使得三船协同的自动驾驶有了可能。
技术实现要素:
4.本发明的目的在于针对现有技术中水面漂浮物清理船要么人工参与、要么无人驾驶作业范围小的不足,提供一种三船协同的自动驾驶无人水面漂浮物清洁船。本发明可满足对水环境漂浮物清理的需求。
5.本发明的目的是通过以下技术方案来实现的:一种三船协同的自动驾驶无人水面漂浮物清洁船,包括一个主船和二个副船,二个副船通过漂浮带与主船相连。三船均具有自动驾驶功能,相互协同成倒品字型行进,同时联合漂浮带形成半包围结构清扫水面。其中,主船结合激光雷达、图像视觉、定位系统、pid控制实现自动驾驶。副船通过激光雷达实现自动驾驶。
6.进一步地,主船的自动驾驶功能:
7.通过定位系统和目标位置规划行驶路径,再结合pid控制算法得到主船的基础前行速度和基础转向速度。通过激光雷达得到障碍物和岸边相对主船的距离和方位,从而得到主船的障碍规避的转向速度和前行速度。通过图像视觉获得副船的位置和朝向,从而得到主船为了与副船保持距离不变且朝向一致所需的前行和转向的协同补偿速度,以及副船的协同补偿速度。将基础速度、障碍规避速度和协同补偿速度进行加权累加得到主船的执行速度并实现。
8.进一步地,副船的自动驾驶功能:
9.通过激光雷达得到岸边和障碍物相对副船的距离和方位,从而得到副船为了与岸边保持期望距离所需的沿岸行驶速度,和为了避开障碍物的沿岸行驶速度。副船将主船发送的主船基础速度和副船协同补偿速度,以及自身的沿岸行驶速度和沿岸行驶速度加权相加后作为副船的执行速度并实现。
10.进一步地,主船的自动驾驶功能具体为:
11.主船根据定位系统给出的当前定位信息、目标点位置以及地图信息,基于视线法规划一条行驶路径。以规划路径点为目标牵引点,以其与定位系统获取的实时坐标位置的连线长度作为前向速度的反馈量,通过pid控制算法,给出主船的基础前行速度;同时以这个连线的朝向作为主船的期望前进方向,将其与定位系统获取的主船当前航向角的偏差作为反馈,通过pid控制算法,给出主船的基础转向速度。主船根据主船激光雷达的扫描信息,聚类出障碍物和河道相对主船的距离和方位,根据排斥势场方法,给出主船的障碍规避的转向速度和前行速度。主船根据获取的图像信息,采用深度神经网络,提取包含副船的边界框;在此框中,利用颜色信息提取副船的轮廓,并通过双目匹配算法确定这些轮廓的三维位置;三维位置聚合后,获得副船的位置和朝向。主船依据自身的位置朝向与副船的位置朝向的偏差,通过比例反馈,给出主船的前行和转向的协同补偿速度,以及副船的协同补偿速度,使得主船相对副船的距离保持不变且朝向一致。主船将上述的基础速度、障碍规避速度和协同补偿速度进行加权累加,作为主船的执行速度。
12.进一步地,副船的自动驾驶功能具体为:副船依据副船激光雷达的扫描信息,聚类形成河岸和障碍物信息。对沿河岸行驶的副船,根据聚类得到的副船与河岸距离,以及与期望距离的偏差,给出副船沿河岸的行驶速度。对聚类的障碍物信息,依据势场排斥法,给出副船的障碍规避速度。副船同时获取主船发送过来的主船基础速度和副船协同补偿速度。最终将上述的四个速度加权相加后作为副船的执行速度。
13.进一步地,主船包括激光雷达、摄像头、定位系统、传送带、收集框、推进器。传送带安装在船体前部,形态为前低后高;传送带后方为漂浮物的收集框。
14.进一步地,收集框与船体滑动连接。
15.进一步地,副船包括激光雷达、推进器等。
16.进一步地,副船还包括导水板和护栏。
17.进一步地,副船还包括密封接插件。
18.本发明的有益效果是:本发明通过自动驾驶技术在三体船协同控制上的应用,通过协同形成大范围水域的清扫,可满足实际的水域清洁需求。
附图说明
19.图1为主船结构图;
20.图2为副船结构图;
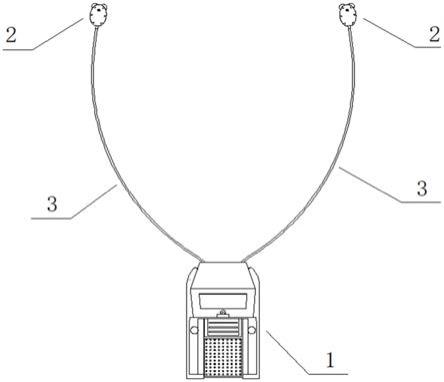
21.图3为副船和主船形成到品字型队形图;
22.图中:主船1、副船2、漂浮带3、主船激光雷达4、双目摄像头5、副船激光雷达6、gps/北斗定位系统8、传送带9、收纳筐11、密封舱14、副船双推进器16、导水板17、护栏19、水密封接插件21、主船双推进器23。
具体实施方式
23.以下说明结合了一种具体实例,详细介绍本发明的各个步骤,但本发明的实施方式不限于此,且本发明的保护范围不限于此具体的实施例。
24.如图3所示,本发明一种三船协同的自动驾驶无人水面漂浮物清洁船,包括一个主船1、两根漂浮带3和二个副船2。副船2位于主船1前方,每个副船2通过一根漂浮带3与主船1
相连,三船均具有自动驾驶功能,基于图像处理和雷达扫描技术相互协同成倒品字型行进,且联合漂浮带3形成半包围结构清扫水面。其中,主船1和副船2均设有双推进器,通过左右推进器的差速实现转向。
25.如图1所示,主船1为双体船结构,包括主船激光雷达4、双目摄像头5、gps/北斗定位系统8、传送带9、收集框11、主船双推进器23。其中,主船激光雷达4、双目摄像头5位于船头,gps/北斗定位系统8位于船中部;主船双推进器23对称安装在船尾。传送带9安装在船体前部,形态为前低后高,两根漂浮带3的一端分别连接传送带9机架的两侧;传送带9后方为漂浮物的收集框11,且收集框11位于传送带9后端的下方。收集框11与船体滑动连接,可从船尾拉出。
26.如图2所示,副船2为单体船结构,包括密封舱14、副船激光雷达6、副船双推进器16、导水板17、护栏19。副船激光雷达6安装在密封舱14上。副船双推进器16位于密封舱14下方。导水板17位于副船双推进器16下方,保护推进器。副船双推进器16侧面设有护栏19,防水草缠绕。优选地,导水板17通过两侧护栏19和中间立板24,连接在密封舱14底部。副船2尾部设计为平面,水面上方的副船2尾部平面设有水密封接插件21,水密封接插件21用于防水,且便于外部器件的维修、更换;水面下方的副船2尾部平面与漂浮带3相连。
27.主船1的自动驾驶功能具体为:
28.主船1根据gps/北斗定位系统8给出的当前定位信息、目标点位置以及地图信息,基于视线法(line of sight)规划一条行驶路径。以规划路径点为目标牵引点,以其与gps/北斗定位系统8获取的实时坐标位置的连线长度作为前向速度的反馈量,通过pid控制算法,给出主船1的基础前行速度;同时以这个连线的朝向作为主船1的期望前进方向,将其与gps/北斗定位系统8获取的主船1当前航向角的偏差作为反馈,通过pid控制算法,给出主船的基础转向速度。
29.主船1根据主船激光雷达4的扫描信息,聚类出障碍物和河道相对主船1的距离和方位,根据排斥势场方法,给出主船1的障碍规避的转向速度和前行速度。
30.主船1根据双目摄像头5获取的图像信息,采用深度神经网络(如yolo算法),提取包含副船2的边界框;在此框中,利用颜色信息提取副船2的轮廓,并通过双目匹配算法确定这些轮廓的三维位置;三维位置聚合后,获得副船2的位置和朝向。主船1依据自身的位置朝向与副船2的位置朝向的偏差,通过比例反馈,给出主船1的前行和转向的协同补偿速度,以及副船2的协同补偿速度,使得主船1相对副船2的距离保持不变且朝向一致。
31.主船1将上述的基础速度、障碍规避速度和协同补偿速度进行加权累加,作为主船1的执行速度来控制主船双推进器23动作,实现执行速度。其中,基础速度包括基础前行速度和基础转向速度。
32.副船2的自动驾驶功能具体为:
33.副船2依据副船激光雷达6的扫描信息,聚类形成河岸和障碍物相对副船2的距离和方位。
34.对沿河岸行驶的副船2,根据聚类得到的副船2与河岸距离,以及与期望距离的偏差,给出副船2沿河岸的行驶速度。
35.对聚类的障碍物信息,依据势场排斥法,给出副船2的障碍规避速度。
36.副船2同时通过无线或者漂浮带3内置的电缆线获取主船发送过来的主船1基础速
度和副船2协同补偿速度。
37.最终将上述的四个速度加权相加后作为副船2的执行速度,控制副船双推进器16动作实现执行速度。
38.三船协同成倒品字型行进收集漂浮垃圾,具体过程为:
39.主船1和2个副船2先进行初始化,三船都平行于河道且朝向与目标方向一致,并张开成倒品字形,副船2在前,主船1在后。
40.然后启动自动驾驶模式,依据上述的自动驾驶过程三船协同在河道中向指定目标前进。
41.三船形成的半包围圈内的水将在主船双推进器23的抽水作用下,快速向主船1流动;同时在漂浮带3的拦截和导向作用下,带动半包围圈内的水面漂浮物,向主船1船头汇聚,由主船1配置的传送带9将漂浮物向后方运输,在最高点倾倒入下方的收集框11中。