1.本实用新型属于水上设备技术领域,具体涉及一种救援用无人船。
背景技术:
2.在水流湍急水域中常有落水溺水事故发生,在现有技术中,通常需要有经验的救援人员在遇到落水人员后乘坐并操控船体滑行至落水人员身边,救援者将落水者拉上船体,从而实现落水者的救援,但该种方式对救援人员的船体驾驶经验的要求较高,如果救援人员的经验不足,不能顺利将船体驾驶至落水者处,可能延误救援时机。
技术实现要素:
3.因此,为克服上述技术问题,本实用新型提供一种救援用无人船,包括船体和动力系统,所述动力系统设于所述船体并驱动所述船体移动,还包括人机交互模块、控制器和人体跟踪系统,所述人体跟踪系统包括热成像仪,所述热成像仪固定于所述船体,所述动力系统包括主推进器、左推进器和右推进器,所述主推进器设置于所述船体的尾部,所述左推进器和所述右推进器分别位于所述船体的左侧和右侧;
4.所述人机交互模块与所述控制器通信连接,所述控制器与所述热成像仪、所述主推进器、所述左推进器及所述右推进器电性连接。
5.进一步地,还包括取像系统,所述取像系统包括前摄像头、左摄像头和右摄像头,所述前摄像头、所述左摄像头和所述右摄像头分别固定于所述船体的前端、左端和右端,所述前摄像头、所述左摄像头和所述右摄像头与所述控制器电性连接,所述人机交互模块为操控显示屏。前摄像头、左摄像头和右摄像头将船体的前方、左侧和右侧的进行实时录像并将图像信息通过控制器反馈于操控显示屏中,供救援人员时刻观察情况。
6.进一步地,包括阻碍物回避系统,所述阻碍物回避系统包括前声呐探测装置、左声呐探测装置和右声呐探测装置,所述前声呐探测装置、所述左声呐探测装置和所述右声呐探测装置分别固定于所述前声呐探测装置、所述左声呐探测装置和所述右声呐探测装置与所述控制器电性连接。前声呐探测装置、左声呐探测装置和右声呐探测装置分别对船体的前方、左侧、右侧的障碍物的位置信息进行探测并反馈于控制器,控制器通过控制动力系统使船体避开障碍物。
7.进一步地,所述船体的侧边设有抓握部。抓握部可设为把手,可供落水者抓握。
8.进一步地,所述船体的侧边设有挂钩。挂钩可供落水者挂随身物件。
9.进一步地,所述挂钩的表面设有聚氨酯胶层。聚氨酯胶层具有良好的防滑效果,避免挂于挂钩的物件滑落。
10.进一步地,所述聚氨酯胶层的表面设有防滑凸纹。进一步增加防滑效果。
11.进一步地,还包括照明装置,所述照明装置的底部与所述船体的顶部通过相互配合的滑槽可拆卸安装。可在夜晚等视线差的情况下,将照明装置装与船体,便于落水者或救援人员观望船体所在位置。
12.进一步地,还包括扬声器和话筒,所述扬声器固定于所述船体,所述扬声器与所述控制器电性连接,所述话筒与所述人机交互模块电性连接。救援人员可通过手持话筒并朝话筒讲话,声音即可从船体的扬声器传出,便于救援人员与落水者之间的沟通。
13.本实用新型产生的有益效果是:主推进器推动船体向前移动,左推进器和右推进器可分别使船体向侧方移动,利用人体有温度的原理,通过热成像仪捕捉落水者的位置并将信息反馈于控制器,控制器分别通过控制主推进器、左推进器和所述右推进器使船体向落水者位置推进,船体可通过热成像仪移动至落水者的位置,无需驾驶经验成熟的救援人员驾驶船体,此外,与控制器通信连接的人机交互模块可通过对控制器发送信号,远程干涉船体的移动,使船体能更精确地移动至落水者的位置。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
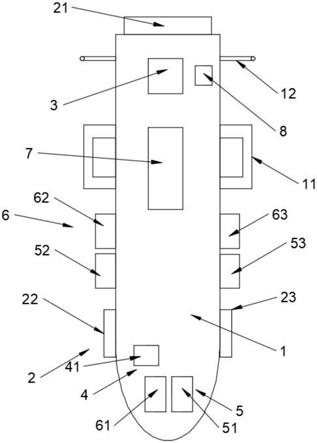
15.图1为本实用新型的结构示意图;
16.其中,1、船体;11、抓握部;12、挂钩;2、动力系统;21、主推进器;22、左推进器;23、右推进器;3、控制器;4、人体跟踪系统;41、热成像仪;5、取像系统;51、前摄像头;52、左摄像头;53、右摄像头;6、阻碍物回避系统;61、前声呐探测装置;62、左声呐探测装置;63、右声呐探测装置;7、照明装置;8、扬声器。
具体实施方式
17.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
18.下面将结合附图来描述本实用新型的具体实施方式。
19.图1示出了本实用新型提供的一种救援用无人船,包括船体1和动力系统2,动力系统2设于船体1并驱动船体1移动,还包括人机交互模块、控制器3和人体跟踪系统4,人体跟踪系统4包括热成像仪41,热成像仪41固定于船体1,动力系统2包括主推进器21、左推进器22和右推进器23,主推进器21设置于船体1的尾部,左推进器22和右推进器23分别位于船体1的左侧和右侧;
20.人机交互模块与控制器3通信连接,控制器3与热成像仪41、主推进器21、左推进器22及右推进器23电性连接。
21.还包括取像系统5,取像系统5包括前摄像头51、左摄像头52和右摄像头53,前摄像头51、左摄像头52和右摄像头53分别固定于船体1的前端、左端和右端,前摄像头51、左摄像头52和右摄像头53与控制器3电性连接,人机交互模块为操控显示屏。
22.包括阻碍物回避系统6,阻碍物回避系统6包括前声呐探测装置61、左声呐探测装置62和右声呐探测装置63,前声呐探测装置61、左声呐探测装置62和右声呐探测装置63分
别固定于前声呐探测装置61、左声呐探测装置62和右声呐探测装置63与控制器3电性连接。
23.船体1的侧边设有抓握部11。抓握部11可设为把手,可供落水者抓握。
24.船体1的侧边设有挂钩12。挂钩12可供落水者挂随身物件。
25.挂钩12的表面设有聚氨酯胶层。聚氨酯胶层具有良好的防滑效果,避免挂于挂钩12的物件滑落。
26.聚氨酯胶层的表面设有防滑凸纹。进一步增加防滑效果。
27.还包括照明装置7,照明装置7的底部与船体1的顶部通过相互配合的滑槽可拆卸安装。可在夜晚等视线差的情况下,将照明装置7装与船体1,便于落水者或救援人员观望船体1所在位置。
28.还包括扬声器8和话筒,扬声器8固定于船体1,扬声器8与控制器3电性连接,话筒与人机交互模块电性连接。救援人员可通过手持话筒并朝话筒讲话,声音即可从船体1的扬声器8传出,便于救援人员与落水者之间的沟通。
29.工作原理:救援人员可在岸上将无人船放下水体,启动控制器3和人机交互模块,主推进器21推动船体1向前移动,左推进器22和右推进器23可分别使船体1向侧方移动,利用人体有温度的原理,通过热成像仪41捕捉落水者的位置并将信息反馈于控制器3,控制器3分别通过控制主推进器21、左推进器22和所述右推进器23使船体1向落水者位置推进,同时,前声呐探测装置61、左声呐探测装置62和右声呐探测装置63分别对船体1的前方、左侧、右侧的障碍物的位置信息进行探测并反馈于控制器3,控制器3通过控制动力系统2使船体1避开障碍物,此外,前摄像头51、左摄像头52和右摄像头53将船体1的前方、左侧和右侧的进行实时录像并将图像信息通过控制器3反馈于操控显示屏中,供救援人员时刻观察情况,与控制器3通信连接的人机交互模块可通过对控制器3发送信号,远程干涉船体1的移动,使船体1能更精确地移动至落水者的位置,落水者通过抓取把手或船体1后随船体1到达岸上。
30.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的。
31.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出简单推演或替换,都应当视为属于本实用新型的保护范围。