1.本实用新型涉及水下机器人技术领域,尤其是涉及一种蛇鳗形轻作业模块化水下自主运维机器人。
背景技术:
2.近年来人们尝试采用水下机器人开展海底油气生产系统、海底观测网、海上风电场等海洋基础设施的巡检。现有的自主水下航行器和遥控无人潜水器等传统水下机器人为刚性结构,在复杂水下设施中通过性、灵活性欠佳,且通常不具备水下充电的功能,不能满足长时间水下工作的要求。现有的水下仿生机器人在一定程度上提高了水下机器人的运动灵活性,但对自身姿态位置精细调节较低,通常不具备作业能力。水下机器人在水下基础设施巡检任务中往往需要携带不同的设备,如摄像头、声纳、机械爪、机械扳手以及水下探测传感器,特别是面对一些复杂度较高的水下任务时,现有水下机器人对于多任务的适应性较低。
技术实现要素:
3.本实用新型的目的就是为了克服上述现有技术存在的自主水下机器人灵活性不高、功能单一、通用性不强以及没有作业能力的缺陷而提供一种蛇鳗形轻作业模块化水下自主运维机器人。
4.本实用新型的目的可以通过以下技术方案来实现:
5.一种蛇鳗形轻作业模块化水下自主运维机器人,包括机器人本体,所述机器人本体包括多种模块舱,所述模块舱通过螺栓相互固定,所述模块舱的类型包括机械爪工具舱、机械扳手工具舱、动力舱、电池舱、扩展电池舱和关节舱,所述机械爪工具舱和机械扳手工具舱分设于机器人本体两端,所述动力舱、电池舱和扩展电池舱设于机械爪工具舱和机械扳手工具舱之间,通过关节舱进行连接,由关节舱调节所连接的两个模块舱的相对位置。
6.所述机械爪工具舱用于拍摄水下视频以及抓取物体,包括机械爪、第一摄像头、第一照明灯、机械爪工具舱外壳和端盖。
7.进一步地,所述第一摄像头的数量为2个,对称分布于机械爪的两侧,所述第一照明灯的数量为2个,对称分布于机械爪的两侧,所述第一照明灯的中心连线与第一摄像头的中心连线垂直。
8.所述机械扳手工具舱用于拍摄水下视频以及螺栓的松紧,包括机械扳手、第二摄像头、第二照明灯、机械扳手工具舱外壳和端盖。
9.进一步地,所述第二摄像头的数量为2个,对称分布于机械扳手的两侧,所述第二照明灯的数量为2个,对称分布于机械扳手的两侧,所述第二照明灯的中心连线与第二摄像头的中心连线垂直。
10.进一步地,所述第一摄像头和第二摄像头用于采集水下视频和水下视觉导航,所述第一照明灯和第二照明灯用于对水下环境提供照明,所述机械爪工具舱外壳和机械扳手
工具舱外壳用于保护舱内元件。
11.进一步地,所述机械爪工具舱和机械扳手工具舱中端盖设于机械爪和机械扳手的背面。
12.所述动力舱用于进行复杂运算与运动控制,同时推动机器人的运动,包括动力舱筒身,所述动力舱筒身的两端设有端盖,所述动力舱筒身的外侧设有天线、第一推进器和第二推进器,所述动力舱筒身的内部设有动力舱支架,所述动力舱支架用于支撑动力舱的内部结构且用于固定动力舱内部的各个元件,所述动力舱支架通过法兰与端盖连接,所述动力舱支架上设有调试模块、单板计算机、串口扩展模块、配重板、运动控制模块和usb扩展模块。
13.进一步地,所述第一推进器的数量为2个,分设于动力舱筒身的水平两侧,2个第一推进器的推进方向一致且推进方向与动力舱筒身垂直,所述第二推进器分设于动力舱筒身上远离第一推进器的上下两侧,所述第二推进器的推进方向互相垂直且各自推进方向与动力舱筒身的角度均为45度。
14.进一步地,所述天线用于机器人本体和外界通信;所述调试模块连接单板计算机和外接计算机,用于调试程序;所述单板计算机用于对复杂数据进行计算;所述串口扩展模块用于后续扩展串口仪器设备,预留有一定数量的接口;所述配重板的数量为2个,对称固定在动力舱支架上,用于调节机器人本体的自重;所述运动控制模块自身自带有一套位姿传感系统,用于机器人本体的姿态解算,同时进行机器人本体的运动控制;所述usb扩展模块用于后续扩展usb接口的仪器设备,预留有一定数量的接口。
15.所述电池舱用于给整个机器人本体供电,包括电池舱筒身,所述电池舱筒身的两端设有端盖,所述电池舱筒身的内部电池舱支架,所述电池舱支架用于支撑电池舱的内部结构且用于固定电池舱内部的各个元件,所述电池舱支架通过法兰与端盖连接,所述电池舱支架上设有电池接线端子、供电管理模块、电池、充电管理模块和充电线圈。
16.进一步地,所述供电管理模块用于直流电压的调节输出,用于对机器人本体的各种用电设备进行分别供电;所述充电管理模块用于对电池的充电进行管理和控制;所述充电线圈的数量为2个,分别位于电池舱的两端,用于与外界充电线圈进行磁耦合,配合充电管理模块从而实现对电池的无线充电。
17.所述扩展电池舱用于给机器人本体增加续航,包括扩展电池舱筒身,所述扩展电池舱筒身用于保护舱内元件,所述扩展电池舱筒身的两端设有端盖,所述扩展电池舱筒身的内部设有扩展电池舱支架,所述扩展电池舱支架用于支撑扩展电池舱的内部结构且用于固定扩展电池舱内部的各个元件,所述扩展电池舱支架通过法兰与端盖连接,所述扩展电池舱支架上设有电池。
18.所述关节舱包括波纹管,所述波纹管用于保护舱内元件且可以在一定范围内弯曲,所述波纹管的两端设有端盖,所述波纹管通过法兰与端盖连接,所述波纹管的内部设有舵机。
19.所述端盖用于和其它模块舱进行连接,所述端盖的中心设有接线孔,所述接线孔中设有水密接线端子用于供电以及通信。
20.所述机器人本体在运行时设有三个主程序以及一个可调用子程序进行控制,所述三个主程序包括执行任务程序、自身电量监测与处理程序和自身故障监测与处理程序;所
述可调用子程序具体为返航程序,可由自身电量监测与处理程序、自身故障监测与处理程序调用。
21.与现有技术相比,本实用新型具有以下有益效果:
22.1.本实用新型相比传统的单体式水下机器人,通过设置可弯曲且体型细长的关节舱来对其他模块舱进行连接,提高了水下机器人的运动灵活性和通过性。
23.2.本实用新型相比传统的单体式水下机器人,由具有多种功能的模块舱相互连接构成,可以根据需要增减不同功能的模块舱,在不同的任务场景下可以快速切换,具有较高的通用性。
24.3.本实用新型的水下机器人相比传统的自主式水下机器人,通过设置机械爪工具舱和机械扳手工具舱,使机器人本体具备一定的水下作业能力。
25.4.本实用新型的水下机器人相比全靠仿生驱动的仿生机器人,由于其融合了传统的推进器驱动的方式,在水下作业时具备更好的可控性和稳定性。
26.5.本实用新型的水下机器人由于具有多个动力舱,多组推进器对于整个机器人高度冗余,可以完成复杂度较高动作。
27.6.本实用新型的水下机器人在电池舱中设置有充电线圈,有无线充电的功能,使机器人本体具备在水下常驻的能力。
附图说明
28.图1为本实用新型机器人本体三节版本的结构示意图;
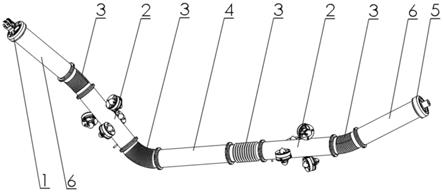
29.图2为本实用新型机器人本体五节版本的结构示意图;
30.图3为本实用新型机械爪工具舱的正面结构组成示意图;
31.图4为本实用新型机械爪工具舱的反面结构组成示意图;
32.图5为本实用新型机械扳手工具舱的正面结构组成示意图;
33.图6为本实用新型机械扳手工具舱的反面结构组成示意图;
34.图7为本实用新型动力舱外部结构组成示意图;
35.图8为本实用新型动力舱内部顶面结构组成示意图;
36.图9为本实用新型动力舱内部底面结构组成示意图;
37.图10为本实用新型电池舱外部结构组成示意图;
38.图11为本实用新型电池舱内部结构组成示意图;
39.图12为本实用新型扩展电池舱结构组成示意图;
40.图13为本实用新型关节舱结构组成爆炸图;
41.图14为本实用新型三节版本机器人本体的各组件连接关系图;
42.图15为本实用新型五节版本机器人本体的各组件连接关系图;
43.图16为本实用新型五节版本机器人本体调试状态下的各组件连接关系图;
44.图17为本实用新型自身电量监测与处理程序的流程示意图;
45.图18为本实用新型执行任务程序的流程示意图;
46.图19为本实用新型自身故障监测与处理程序的流程示意图;
47.图20为本实用新型返航程序的流程示意图。
48.附图标记:
[0049]1‑
机械爪工具舱;1
‑1‑
机械爪;1
‑2‑
第一摄像头;1
‑3‑
第一照明灯;1
‑4‑
机械爪工具舱外壳;2
‑
动力舱;2
‑2‑
动力舱筒身;2
‑3‑
第一推进器;2
‑4‑
第二推进器;2
‑6‑
动力舱支架;2
‑7‑
调试模块;2
‑8‑
单板计算机;2
‑9‑
串口扩展模块;2
‑
10
‑
配重板;2
‑
11
‑
运动控制模块;2
‑
12usb
‑
扩展模块;2
‑
13
‑
天线;3
‑
关节舱;3
‑3‑
波纹管;3
‑4‑
舵机;4
‑
电池舱;4
‑2‑
电池舱筒身;4
‑4‑
电池舱支架;4
‑5‑
电池接线端子;4
‑6‑
供电管理模块;4
‑8‑
充电管理模块;4
‑9‑
充电线圈;5
‑
机械扳手工具舱;5
‑1‑
机械扳手;5
‑2‑
第二摄像头;5
‑3‑
第二照明灯;5
‑4‑
机械扳手工具舱外壳;6
‑
扩展电池舱;6
‑2‑
扩展电池舱筒身;6
‑4‑
扩展电池舱支架;7
‑
端盖;8
‑
接线孔;9
‑
法兰;10
‑
电池。
具体实施方式
[0050]
下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
[0051]
实施例一
[0052]
一种蛇鳗形轻作业模块化水下自主运维机器人,包括机器人本体,机器人本体包括多种模块舱,模块舱通过螺栓相互固定,模块舱的类型包括机械爪工具舱1、机械扳手工具舱5、动力舱2、电池舱4、扩展电池舱6和关节舱3,机械爪工具舱1和机械扳手工具舱5分设于机器人本体两端,动力舱2、电池舱4和扩展电池舱6设于机械爪工具舱1和机械扳手工具舱5之间,通过关节舱3进行连接,由关节舱3调节所连接的两个模块舱的相对位置。
[0053]
本实施例中,如图1所示,机器人本体具体为三节版本,模块舱依次为械爪工具舱1、动力舱2、关节舱3、电池舱4、关节舱3、动力舱2和机械扳手工具舱5。
[0054]
如图3和图4所示,机械爪工具舱1用于拍摄水下视频以及抓取物体,包括机械爪1
‑
1、第一摄像头1
‑
2、第一照明灯1
‑
3、机械爪工具舱外壳1
‑
4和端盖7。
[0055]
第一摄像头1
‑
2的数量为2个,对称分布于机械爪1
‑
1的两侧,第一照明灯1
‑
3的数量为2个,对称分布于机械爪1
‑
1的两侧,第一照明灯1
‑
3的中心连线与第一摄像头1
‑
2的中心连线垂直。
[0056]
如图5和图6所示,机械扳手工具舱5用于拍摄水下视频以及螺栓的松紧,包括机械扳手5
‑
1、第二摄像头5
‑
2、第二照明灯5
‑
3、机械扳手工具舱外壳5
‑
4和端盖7。
[0057]
第二摄像头5
‑
2的数量为2个,对称分布于机械扳手5
‑
1的两侧,第二照明灯5
‑
3的数量为2个,对称分布于机械扳手5
‑
1的两侧,第二照明灯5
‑
3的中心连线与第二摄像头5
‑
2的中心连线垂直。
[0058]
第一摄像头1
‑
2和第二摄像头5
‑
2用于采集水下视频和水下视觉导航,第一照明灯1
‑
3和第二照明灯5
‑
3用于对水下环境提供照明,机械爪工具舱外壳1
‑
4和机械扳手工具舱外壳5
‑
4用于保护舱内元件。
[0059]
机械爪工具舱1和机械扳手工具舱5中端盖7设于机械爪1
‑
1和机械扳手5
‑
1的背面。
[0060]
如图8和图9所示,动力舱2用于进行复杂运算与运动控制,同时推动机器人的运动,包括动力舱筒身2
‑
2,动力舱筒身2
‑
2的两端设有端盖7,动力舱筒身2
‑
2的外侧设有天线2
‑
13、第一推进器2
‑
3和第二推进器2
‑
4,动力舱筒身2
‑
2的内部设有动力舱支架2
‑
6,动力舱
支架2
‑
6用于支撑动力舱2的内部结构且用于固定动力舱2内部的各个元件,动力舱支架2
‑
6通过法兰9与端盖7连接,法兰9底面分别与两端的端盖7通过螺栓相连,法兰9另一端嵌入动力舱筒身2
‑
2,动力舱支架2
‑
6上设有调试模块2
‑
7、单板计算机2
‑
8、串口扩展模块2
‑
9、配重板2
‑
10、运动控制模块2
‑
11和usb扩展模块2
‑
12。
[0061]
如图7所示,第一推进器2
‑
3的数量为2个,分设于动力舱筒身2
‑
2的水平两侧,2个第一推进器2
‑
3的推进方向一致且推进方向与动力舱筒身2
‑
2垂直,第二推进器2
‑
4分设于动力舱筒身2
‑
2上远离第一推进器2
‑
3的上下两侧,第二推进器2
‑
4的推进方向互相垂直且各自推进方向与动力舱筒身2
‑
2的角度均为45度。
[0062]
天线2
‑
13用于机器人本体和外界通信;调试模块2
‑
7连接单板计算机2
‑
8和外接计算机,在实验室环境下调试程序;单板计算机2
‑
8用于对复杂数据进行计算,本实施例中,用于对第一摄像头1
‑
2和第二摄像头5
‑
2传回的数据进行机器视觉相关计算分析;串口扩展模块2
‑
9用于后续扩展串口仪器设备,预留有一定数量的接口;配重板2
‑
10的数量为2个,对称固定在动力舱支架2
‑
6上,用于调节机器人本体的自重;运动控制模块2
‑
11自身自带有一套位姿传感系统,用于机器人本体的姿态解算,同时进行机器人本体的运动控制;usb扩展模块2
‑
12用于后续扩展usb接口的仪器设备,预留有一定数量的接口。
[0063]
如图10和图11所示,电池舱4用于给整个机器人本体供电,包括电池舱筒身4
‑
2,电池舱筒身4
‑
2的两端设有端盖7,电池舱筒身4
‑
2的内部电池舱支架4
‑
4,电池舱支架4
‑
4用于支撑电池舱4的内部结构且用于固定电池舱4内部的各个元件,电池舱支架4
‑
4通过法兰9与端盖7连接,法兰9底面分别与两端的端盖7通过螺栓相连,法兰9另一端嵌入电池舱筒身4
‑
2,电池舱支架4
‑
4上设有电池接线端子4
‑
5、供电管理模块4
‑
6、电池10、充电管理模块4
‑
8和充电线圈4
‑
9。
[0064]
供电管理模块4
‑
6用于直流电压的调节输出,用于对机器人本体的各种用电设备进行分别供电;充电管理模块4
‑
8用于对电池10的充电进行管理和控制;充电线圈4
‑
9的数量为2个,分别位于电池舱4的两端,用于与外界充电线圈进行磁耦合,配合充电管理模块从而实现对电池10的无线充电。
[0065]
如图12所示,扩展电池舱6用于给机器人本体增加续航,包括扩展电池舱筒身6
‑
2,扩展电池舱筒身6
‑
2用于保护舱内元件,扩展电池舱筒身6
‑
2的两端设有端盖7,扩展电池舱筒身6
‑
2的内部设有扩展电池舱支架6
‑
4,扩展电池舱支架6
‑
4通过法兰9与端盖7连接,法兰9底面分别与两端的端盖7通过螺栓相连,法兰9另一端嵌入扩展电池舱筒身6
‑
2,扩展电池舱支架6
‑
4上设有电池10,扩展电池舱支架6
‑
4用于支撑扩展电池舱6的内部结构且用于固定扩展电池舱6内部的各个元件,电池10用于为机器人本体的运行扩充电能。
[0066]
如图13所示,关节舱3包括波纹管3
‑
3,波纹管3
‑
3用于保护舱内元件且可以在一定范围内弯曲,波纹管3
‑
3的两端设有端盖7,波纹管3
‑
3通过法兰9与端盖7连接,法兰9底面分别与两端的端盖7通过螺栓相连,法兰9另一端与波纹管3
‑
3相连,波纹管3
‑
3的内部设有舵机3
‑
4,本实施例中,舵机3
‑
4的数量为2个,2个舵机3
‑
4互相垂直正交相连,相互配合使关节舱3在各个角度弯曲。
[0067]
端盖7用于和其它模块舱进行连接,端盖7的中心设有接线孔8,本实施例中接线孔8的数量为4个,接线孔8中设有水密接线端子用于供电以及通信,电源线和通信线通过水密接线端子穿过端盖7上面的四个接线孔8进行连接。
[0068]
三节版本机器人本体的各组件连接关系图如图14所示。在电气连接上,三节版本机器人本体配备一块可充电电池17,在机器人运行时电能首先流经供电管理模块4
‑
6,继而由供电管理模块4
‑
6分别给机器人各个用电组件进行供电,用电组件包括机械爪1
‑
1、机械扳手5
‑
1、关节舱3的舵机3
‑
4、第一推进器2
‑
3和第二推进器2
‑
4、运动控制模块2
‑
11、单板计算机2
‑
8、第一摄像头1
‑
2和第二摄像头5
‑
2、第一照明灯1
‑
3和第二照明灯5
‑
3、天线2
‑
13、usb扩展模块2
‑
12以及串口扩展模块2
‑
9,其中运动控制模块2
‑
11内置深度计以及惯性测量单元;在机器人本体充电时,电能由充电线圈4
‑
9输送至充电管理模块4
‑
8,再由充电管理模块4
‑
8负责给可充电电池17充电,同时供电管理模块4
‑
6停止给各个用电组件进行供电。在通信连接上,运动控制模块2
‑
11分别与机械爪1
‑
1、机械扳手5
‑
1、舵机3
‑
4、第一推进器2
‑
3和第二推进器2
‑
4单向连接以实现对它们的控制,同时运动控制模块2
‑
11也与单板计算机2
‑
8相连,可以进行双向的通信;单板计算机2
‑
8分别与充电管理模块4
‑
8与供电管理模块4
‑
6双向连接,一方面可以接收它们两者返回的电池相关信息,另一方面也可以对它们两者发送指令进行配置;单板计算机2
‑
8分别与调试模块2
‑
7、串口扩展模块2
‑
9、usb扩展模块2
‑
12双向连接,可以互相传输信息;单板计算机2
‑
8与第一摄像头1
‑
2和第二摄像头5
‑
2双向连接,一方面接收第一摄像头1
‑
2和第二摄像头5
‑
2传回的图像信息,另一方面对第一摄像头1
‑
2和第二摄像头5
‑
2实现控制;单板计算机2
‑
8与天线2
‑
13双向连接,互相传输信息以实现对外界的通信;单板计算机2
‑
8与第一照明灯1
‑
3和第二照明灯5
‑
3单向连接,单板计算机2
‑
8控制第一照明灯1
‑
3和第二照明灯5
‑
3的开启和关闭。
[0069]
机器人本体在运行时设有三个主程序以及一个可调用子程序进行控制,三个主程序包括执行任务程序、自身电量监测与处理程序和自身故障监测与处理程序;可调用子程序具体为返航程序,可由自身电量监测与处理程序、自身故障监测与处理程序调用。
[0070]
本实施例中,机器人本体执行任务程序流程图如图17所示。在一次任务中,首先由单板计算机2
‑
8进行机器人本体的自检,判断自身各功能是否正常,如果不正常,则通过天线2
‑
13对接驳坞发送信号上报问题,然后结束运行,如果正常,则首先由运动控制模块2
‑
11控制第一推进器2
‑
3和第二推进器2
‑
4实现机器人本体的出仓,然后通过天线定位与水下视觉导航的方式航行至作业区域。到达作业区域后,机器人本体开始对水下设施进行巡检,如果没有发现问题,则继续对水下设施进行巡检,如果发现问题,则首先通过天线2
‑
13对接驳坞发送信号上报问题,然后判断机器人本体自身是否可以通过所携带工具解决问题,如果可以解决问题,则执行维修任务,结束后对接驳坞发送信号上报解决问题的情况,然后返回继续对水下设施进行巡检,如果不能解决问题,则也对接驳坞发送信号上报解决问题的情况,然后返回继续对水下设施进行巡检。
[0071]
本实施例中,机器人本体执行自身电量监测与处理程序流程图如图18所示。
[0072]
在一次任务中,自身电量监测与处理程序一直处于运行状态,首先由单板计算机2
‑
8通过已经走过的路程和消耗的电量来更新返航所需的电量阈值,然后判断此时电池17的所剩电量是否达到阈值,如果还未达到,意味着电池电量依然充足,不需要返航,继续返回更新返航所需电量的阈值,如果已经达到阈值,则意味着电池电量不足以继续执行任务,仅仅足够机器人本体返航,则执行返航程序。
[0073]
本实施例中,机器人本体执行自身故障监测与处理程序流程图如图19所示。在一次任务中,自身故障监测与处理程序一直处于运行状态,首先由单板计算机2
‑
8进行机器人
自身的故障检测,然后判断机器人本体是否发生故障,如果没有发生故障,则不断进行机器人自身的故障检测;如果发生故障,则首先通过天线2
‑
13对接驳坞发送信号上报故障问题,然后判断机器人本体的故障问题,如果导航系统和驱动系统没有发生故障,仅仅是例如机械爪1
‑
1、机械扳手5
‑
1等部件发生故障,则执行返航程序;如果导航系统和驱动系统其中任意一个发生了故障,已经不支持返航了,则机器人本体开始周期性地对外发送求救信号直到耗尽电量,期间等待外界的救援。
[0074]
执行任务程序、自身电量监测与处理程序、自身故障监测与处理程序三者由单板计算机2
‑
8的cpu内核分配不同的时间片同时运行。
[0075]
本实施例中,机器人本体执行返航程序流程图如图20所示。返航程序作为其它程序调用的子程序,在一次执行过程中,首先通过天线定位与水下视觉导航的方式航行至接驳坞,然后由运动控制模块2
‑
11控制推进器实现机器人本体的进仓,进仓之后机器人通过充电线圈4
‑
9进行无线充电,同时通过天线2
‑
13上传此次任务的航行日志,然后判断可充电电池17电量是否充满,如果已经充满,则结束程序;如果还没有充满,则继续判断电量是否充满,直至电量充满。
[0076]
实施例二
[0077]
本实施例中,机器人本体扩展腔体,在图1三节版本机器人本体的基础上加上两个扩展电池舱6和两个关节舱3,连接关系如图2所示,是一种五节版本的蛇鳗形轻作业模块化水下自主运维机器人,包括依次连接的机械爪工具舱1、扩展电池舱6、关节舱3、动力舱2、关节舱3、电池舱4、关节舱3、动力舱2、关节舱3、扩展电池舱6和机械扳手工具舱5。
[0078]
五节版本机器人本体各组件连接关系图如图15所示。由于五节版本的机器人本体增加了两个扩展电池舱6,所以与三节版本的区别在于五节版本机器人本体的可充电电池17数量增加为5个,5个可充电电池17也由供电管理系统4
‑
6和充电管理系统4
‑
8统一管理。
[0079]
本实施例中。机器人本体可以进行调试,具体调试状态下各组件连接关系图如图16所示。在电气连接上,外接电源与调试模块2
‑
7相连,调试模块2
‑
7与供电管理模块4
‑
6相连,电能由外接电源通过调试模块2
‑
7输送到供电管理4
‑
6模块,供电管理模块4
‑
6再分别给机器人本体的各个用电组件进行供电。在通信连接上,计算机与调试模块2
‑
7双向连接,调试模块2
‑
7与单板机计算机2
‑
8双向连接,从而建立计算机与机器人内部的单板计算机2
‑
8的双向通信,从而实现调试的功能。
[0080]
其余同实施例一。
[0081]
此外,需要说明的是,本说明书中描述的具体实施例,其零部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所做的举例说明。凡依据本实用新型构思的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实例做各种各样的修改或补充或采用类似的方法,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。