1.本实用新型涉及遥控船技术领域,特别涉及一种用于无线遥控型船用侧向推进器的控制系统。
背景技术:
2.电动船或者船用电动推进器一般是使用电驱动船艇,其动力驱动为电动,通过供电装置给电机供电,驱动螺旋桨产生推进力,可以用于水上出行、竞技、休闲等场合。随着无线控制技术的飞速发展,无线遥控型船也应运而生,目前的无线遥控型船控制时难以实现实时的监控,难以实现精确的控制操作,且易造成推进器发生故障、触礁等事故,安全性较低。
技术实现要素:
3.为解决上述技术问题,本实用新型提供了一种用于无线遥控型船用侧向推进器的控制系统,具有可实现实时监控、提高操作安全性的优点。
4.为达到上述目的,本实用新型的技术方案如下:
5.一种用于无线遥控型船用侧向推进器的控制系统,包括:
6.设置在船体上的中控服务器,所述中控服务器连接有第一无线收发模块,所述中控服务器与推进器的控制器相连接;
7.设置在推进器上且与所述中控服务器相连接的信号采集单元,所述信号采集单元包括:速度传感器、惯性传感器、电流传感器以及超声波传感器;以及,
8.无线操控装置,所述无线操控装置包括:微处理器、与所述微处理器相连接用于控制推进器运行的操控键、与所述微处理器相连接用于与所述第一无线收发模块进行无线通讯的第二无线收发模块、与所述微处理器相连接用于显示所述信号采集单元采集的显示器、以及与所述微处理器相连接的报警装置,当所述信号采集单元的检测信号超过预定阈值时,所述微处理器控制所述报警装置发出报警信息。
9.实现上述技术方案,使用时,通过速度传感器采集船体的速度信息以便于对船行驶速度进行控制,通过惯性传感器测量推进器的加速度、倾斜角度等信息以便对推进器的动力性能进行控制,通过电流传感器检测推进器的驱动电机工作电流以防止驱动电机过流损坏,通过超声波传感器检测船底与障碍物之间的距离以防止船体触礁搁浅;信号采集单元采集到的信号和数据通过第一无线收发模块经第二无线收发模块发送到微处理器中,操作人员通过显示器实时观测各检测参数,以便通过操控键实时调整推进器的运行参数,同时通过报警装置发送报警信息进行提示,以便操作人员及时调整,从而实现了实时监控,提高船行驶的安全性。
10.作为本实用新型的一种优选方案,船体上还设有若干与所述中控服务器相连接的监控摄像头,所述监控摄像头用于监控船体周围的环境。
11.实现上述技术方案,通过监控摄像头可实时监控船体周围的环境,方便操作者及
时调整船体的航向。
12.作为本实用新型的一种优选方案,所述微处理器还连接有语音播放模块,所述语音播放模块用于播放所述信号采集单元采集的数据。
13.实现上述技术方案,通过语音播放模块播放采集的数据,便于操作者实时了解以及时进行调控。
14.作为本实用新型的一种优选方案,所述操控键包括智能锁定件,所述智能锁定件用于在设定好航行参数后将其他操控键锁定,并在长按预定时长后解锁定。
15.实现上述技术方案,通过智能锁定件能防止操作者进行误操作。
16.作为本实用新型的一种优选方案,所述中控服务器还连接gps定位模块,所述显示器还用于显示定位信息。
17.实现上述技术方案,通过gps定位模块实时定位船体的位置,便于操作者监控以调整航向。
18.作为本实用新型的一种优选方案,所述显示器采用触摸屏。
19.实现上述技术方案,便于进行操作。
20.作为本实用新型的一种优选方案,所述报警装置为蜂鸣器或者报警灯。
21.综上所述,本实用新型具有如下有益效果:
22.本实用新型实施例通过提供一种用于无线遥控型船用侧向推进器的控制系统,包括:设置在船体上的中控服务器,所述中控服务器连接有第一无线收发模块,所述中控服务器与推进器的控制器相连接;设置在推进器上且与所述中控服务器相连接的信号采集单元,所述信号采集单元包括:速度传感器、惯性传感器、电流传感器以及超声波传感器;以及,无线操控装置,所述无线操控装置包括:微处理器、与所述微处理器相连接用于控制推进器运行的操控键、与所述微处理器相连接用于与所述第一无线收发模块进行无线通讯的第二无线收发模块、与所述微处理器相连接用于显示所述信号采集单元采集的显示器、以及与所述微处理器相连接的报警装置,当所述信号采集单元的检测信号超过预定阈值时,所述微处理器控制所述报警装置发出报警信息。使用时,通过速度传感器采集船体的速度信息以便于对船行驶速度进行控制,通过惯性传感器测量推进器的加速度、倾斜角度等信息以便对推进器的动力性能进行控制,通过电流传感器检测推进器的驱动电机工作电流以防止驱动电机过流损坏,通过超声波传感器检测船底与障碍物之间的距离以防止船体触礁搁浅;信号采集单元采集到的信号和数据通过第一无线收发模块经第二无线收发模块发送到微处理器中,操作人员通过显示器实时观测各检测参数,以便通过操控键实时调整推进器的运行参数,同时通过报警装置发送报警信息进行提示,以便操作人员及时调整,从而实现了实时监控,提高船行驶的安全性。
附图说明
23.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
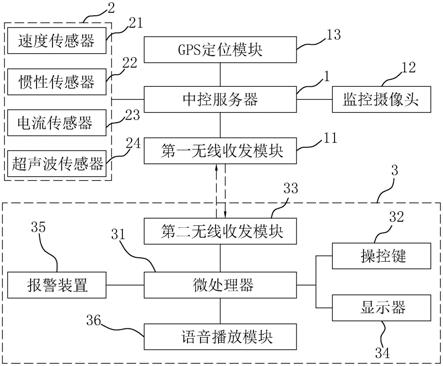
24.图1为本实用新型实施例的控制框图。
25.图2为本实用新型实施例中无线操控装置的结构示意图。
26.图中数字和字母所表示的相应部件名称:
27.1、中控服务器;11、第一无线收发模块;12、监控摄像头;13、gps定位模块;2、信号采集单元;21、速度传感器;22、惯性传感器;23、电流传感器;24、超声波传感器;3、无线操控装置;31、微处理器;32、操控键;321、智能锁定件;33、第二无线收发模块;34、显示器;35、报警装置;36、语音播放模块。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.实施例
30.一种用于无线遥控型船用侧向推进器的控制系统,如图1和图2所示,包括:设置在船体上的中控服务器1,中控服务器1连接有第一无线收发模块11,中控服务器1与推进器的控制器相连接;设置在推进器上且与中控服务器1相连接的信号采集单元2,信号采集单元2包括:速度传感器21、惯性传感器22、电流传感器23以及超声波传感器24;以及,无线操控装置3。
31.具体的,无线操控装置3包括:微处理器31、与微处理器31相连接用于控制推进器运行的操控键32、与微处理器31相连接用于与第一无线收发模块11进行无线通讯的第二无线收发模块33、与微处理器31相连接用于显示信号采集单元2采集的显示器34、以及与微处理器31相连接的报警装置35,当信号采集单元2的检测信号超过预定阈值时,微处理器31控制报警装置35发出报警信息。
32.第一无线收发模块11和第二无线收发模块33可选用蓝牙模块、wifi无线通讯模块、gprs通讯模块等。
33.进一步的,在船体上还设有若干与中控服务器1相连接的监控摄像头12,监控摄像头12用于监控船体周围的环境,监控摄像头12优选为球形摄像头,通过监控摄像头12可实时监控船体周围的环境,方便操作者及时调整船体的航向;同时,中控服务器1还连接gps定位模块13,显示器34还用于显示定位信息,通过gps定位模块13实时定位船体的位置,便于操作者监控以调整航向。
34.进一步的,微处理器31还连接有语音播放模块36,语音播放模块36用于播放信号采集单元2采集的数据,如播报速度值、加速度值、工作电流值、与水底距离值,优选的,语音播放模块36在检测信号超过预定阈值时播放语音提示信息,通过语音播放模块36播放采集的数据,便于操作者实时了解以及时进行调控。
35.进一步的,操控键32包括智能锁定件321,智能锁定件321用于在设定好航行参数后将其他操控键32锁定,并在长按预定时长后解锁定,如长按2
‑
5s,通过智能锁定件321能防止操作者进行误操作。
36.本实施例中,显示器34采用触摸屏,以便于进行操作,报警装置35为蜂鸣器或者报警灯,本实施例中选用报警灯。
37.使用时,通过速度传感器21采集船体的速度信息以便于对船行驶速度进行控制,通过惯性传感器22测量推进器的加速度、倾斜角度等信息以便对推进器的动力性能进行控制,通过电流传感器23检测推进器的驱动电机工作电流以防止驱动电机过流损坏,通过超声波传感器24检测船底与障碍物之间的距离以防止船体触礁搁浅;信号采集单元2采集到的信号和数据通过第一无线收发模块11经第二无线收发模块33发送到微处理器31中,操作人员通过显示器34实时观测各检测参数,以便通过操控键32实时调整推进器的运行参数,同时通过报警装置35发送报警信息进行提示,以便操作人员及时调整,从而实现了实时监控,提高船行驶的安全性。
38.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。