1.本实用新型属于水上环卫设备领域,具体涉及一种智能充电水上垃圾清理船。
背景技术:
2.水是生命之源,它不仅养育了我们人类,也是万物生存的根本,进入二十一世纪以来,水污染问题已成为全球化问题,所以治理水质污染也成了环境整治的重中之重。通常,对于河道及各流域的水上垃圾都需要相关部门定期指派环卫工人定期负责清理,但由于河道流域众多,大部分河道也是常年无人顾及,相关部门无法获知河道的水质情况,也无法对这些河道进行全面的管控,导致很多河道已经成了臭水沟,污染区附近居民只能掩之以鼻,且人工打捞存在着劳动力紧缺问题和打捞危险性。
技术实现要素:
3.本实用新型克服了现有技术中的缺点,提供了一种智能充电水上垃圾清理船,无需人工,可在预设的路线自动清理水面垃圾,也可远程获知水质情况,且当电量不足时,可实现自动充电。
4.为了解决上述技术问题,本实用新型是通过以下技术方案实现的:
5.一种智能充电水上垃圾清理船,包括船体、垃圾柜、垃圾收集装置、太阳能发电装置、主控箱、防撞模块、水质检测装置和充电接口;所述垃圾收集装置包括主驱动器、副驱动器、滑杆、桶体、内层过滤网、转动杆、流速传感器、水泵接口、挂钩,主驱动器与桶体固定连接,内层过滤网设置在桶体内部,桶体与内层过滤网可分离,转动杆的一端与内层过滤网固定连接,另一端与副驱动器转动连接,主驱动器与副驱动器可沿着滑杆垂直升降,副驱动器可绕着滑杆水平转动,桶体底部设有水泵接口,水泵接口上设有流速传感器,垃圾收集装置通过挂钩与船体可拆卸连接;所述太阳能发电装置为垃圾收集装置、主控箱、防撞模块和水质检测装置提供电源;所述主控箱包括防水箱体、主控器、触摸屏、电量检测模块、通信模块和gps定位装置,所述主控器、电量检测模块、通信模块和gps定位装置设置在所述防水箱体内部,所述触摸屏设置在所述防水箱体顶部,主控器分别与垃圾收集装置、防撞模块、水质检测装置、触摸屏、电量检测模块、通信模块及gps定位装置连接,主控器接收水质检测装置发送的数据控制触摸屏显示水质情况,并通过通信模块将水质检测装置发送的数据传输到远程终端;主控器接收gps定位装置发送的数据并根据触摸屏设置的巡航路线控制船体自动巡航;所述触摸屏上设有身份识别装置,主控器接收身份识别装置发送的数据控制整个系统的开关;所述防撞模块包括至少一个测距探头,主控器根据所述防撞模块测得的数据控制船体避障;垃圾柜底部设有称重传感器,当称重传感器测得的数据达到预设的阈值时,主控器根据预设的路线控制船体自动驶向垃圾收集点。当电量检测模块测得的数据低于预设的阈值时,主控器根据预设的路线控制船体自动驶向充电点充电。
6.进一步,所述测距探头为超声波测距传感器或红外测距传感器。
7.与现有技术相比,本实用新型的有益效果是:
8.本实用新型所述一种智能充电水上垃圾清理船,桶体底部设有水泵接口与水泵连接,通过水泵的吸力制造水流落差产生旋涡,将垃圾吸进桶体内。桶体内设有内层过滤网,水泵接口上设有流速传感器,当流速传感器检测到的水流速度低于预设的阈值时,主驱动器沿着滑杆往上升,从而带动桶体上升离开水面,水泵停止工作。当主驱动器上升到预设高度时停止,副驱动器继续上升,从而带动内层过滤网上升与桶体分离。当副驱动器上升到预设高度时停止,然后绕着滑杆水平转动,将内层过滤网转动到垃圾柜上方,然后通过转动杆带动内层过滤网翻转,从而将收集的垃圾倒入垃圾柜内,主控器接收gps定位装置发送的数据并根据触摸屏设置的巡航路线控制船体自动巡航,从而实现无需人工,即可在预设的路线自动清理水面垃圾。主控器接收水质检测装置发送的数据控制触摸屏显示水质情况,并通过通信模块将水质检测装置发送的数据传输到远程终端,可实现远程监控水质情况,避免河道无人监管而变臭水沟。所述触摸屏上设有身份识别装置,主控器接收身份识别装置发送的数据控制整个系统的开关,从而保证智能充电水上垃圾清理船的使用安全性。垃圾柜底部设有称重传感器,当称重传感器测得的数据达到预设的阈值时,主控器根据预设的路线控制船体自动驶向垃圾收集点。当电量检测模块测得的数据低于预设的阈值时,主控器根据预设的路线控制船体自动驶向充电点充电,从而保证垃圾清理船持续工作。
附图说明
9.附图用来提供对本实用新型的进一步理解,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
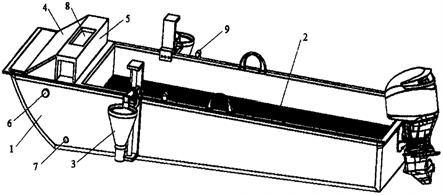
10.图1是智能充电水上垃圾清理船的立体结构图。
11.图2是垃圾收集装置的立体结构图。
12.图中,1——船体;2——垃圾柜;
13.3——垃圾收集装置;4——太阳能发电装置;
14.5——主控箱;6——防撞模块;
15.7——水质检测装置;8——触摸屏;9——充电接口;
16.31——主驱动器;32——副驱动器;33——滑杆;
17.34——桶体;35——内层过滤网;36——转动杆;
18.37——流速传感器;38——水泵接口;39——挂钩。
具体实施方式
19.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
20.如图1、2所示,本实用新型所述一种智能充电水上垃圾清理船,包括船体1、垃圾柜2、垃圾收集装置3、太阳能发电装置4、主控箱5、防撞模块6、水质检测装置7和充电接口9;所述垃圾收集装置3包括主驱动器31、副驱动器32、滑杆33、桶体34、内层过滤网35、转动杆36、流速传感器37、水泵接口38、挂钩39,主驱动器31与桶体34固定连接,内层过滤网35设置在桶体34内部,桶体34与内层过滤网35可分离,转动杆36的一端与内层过滤网35固定连接,另一端与副驱动器32转动连接,主驱动器31与副驱动器32可沿着滑杆33垂直升降,副驱动器32可绕着滑杆33水平转动,桶体34底部设有水泵接口38,水泵接口38上设有流速传感器37,
垃圾收集装置3通过挂钩39与船体1可拆卸连接;所述太阳能发电装置4为垃圾收集装置3、主控箱5、防撞模块6和水质检测装置7提供电源;所述主控箱5包括防水箱体、主控器、触摸屏8、电量检测模块、通信模块和和gps定位装置,所述主控器、电量检测模块、通信模块和gps定位装置设置在所述防水箱体内部,所述触摸屏8设置在所述防水箱体顶部,主控器分别与垃圾收集装置3、防撞模块6、水质检测装置7、触摸屏8、电量检测模块、通信模块及gps定位装置连接,主控器接收水质检测装置7发送的数据控制触摸屏8显示水质情况,并通过通信模块将水质检测装置7发送的数据传输到远程终端;主控器接收gps定位装置发送的数据并根据触摸屏8设置的巡航路线控制船体自动巡航;所述触摸屏8上设有身份识别装置,主控器接收身份识别装置发送的数据控制整个系统的开关;所述防撞模块6包括至少一个测距探头,主控器根据所述防撞模块6测得的数据控制船体避障;垃圾柜2底部设有称重传感器,当称重传感器测得的数据达到预设的阈值时,主控器根据预设的路线控制船体自动驶向垃圾收集点。当电量检测模块测得的数据低于预设的阈值时,主控器根据预设的路线控制船体自动驶向充电点充电。。
21.进一步,所述测距探头为超声波测距传感器或红外测距传感器。
22.最后应说明的是:以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但是凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。