1.本发明属于游泳机器人领域,是一种仿生黑斑蛙游泳机器人,具体来说,一种模仿黑斑蛙在水中游泳的机器人,严格模仿黑斑蛙的外形,膝关节、踝关节、末端点的运动曲线,严格模仿黑斑蛙的运动过程,并采用电机的回转运动转化为齿条的移动从而驱动腿的运动,来实现腿的连续运动,从而让机器人实现快速移动。并采用转向机构让机器人更加灵活。
背景技术:
2.游泳机器人可以代替人在水下完成各种复杂任务,他可以在水下进行水下侦察,水文观测,对水温、水深和水质进行测量,对探索海洋,河地观察具有重要意义。并且采用仿生结构尽可能减少机器人对环境的破坏。因此需要一种控制简单,成本低,重量轻,仿生效果好的游泳机器人。
3.对于现有的仿生游泳机器人的设计,公布号cn104192288b的发明专利《一种基千气动肌肉驱动的仿青蛙游动机器人》采用三个气动肌肉来进行驱动,实现了高灵活性控制,但是控制难度大,难以机器人微型化。
4.针对上述设计中存在的问题,我们设计出一种仿生黑斑蛙游泳机器人,在保证结构简单,控制方便,体积小的前提下,可实现高速移动,可完成各种水下任务的水下游泳机器人,并且此机器人高度模仿黑斑蛙游泳时的姿态和各关节运动曲线,实现高度仿生。
技术实现要素:
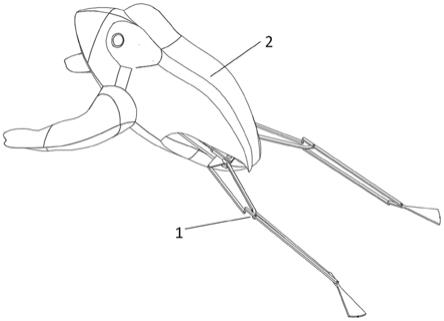
5.本发明的目的是提供一种仿生黑斑蛙游泳机器人,包括腿部执行机构(1)和驱动和控制机构(2)。
6.腿部执行机构(1),包含:齿轮驱动连杆(1
‑
1)、腿部基座(1
‑
2)、大腿连杆(1
‑
3)、小腿连杆1(1
‑
4)、小腿连杆2(1
‑
5)、足部连杆(1
‑
6);各个构件和设备的连接关系为:两边的腿部基座(1
‑
2)固定连接在下支撑板(2
‑
2);齿轮驱动连杆(1
‑
1)靠近躯干部分的铰链点通过轴连接在腿部基座(1
‑
2)与上支撑板(2
‑
3)之间,形成旋转副,远离躯干的两个铰链点通过轴分别连接在小腿连杆1(1
‑
4)、小腿连杆2(1
‑
5)上,形成两个旋转副,延伸出来的齿轮与驱动齿条(2
‑
1)配合,通过驱动齿条(2
‑
1)获得驱动力;大腿连杆(1
‑
3)靠近躯干的铰链点通过轴连接在腿部基座(1
‑
2)上,远离躯干的铰链点通过轴连接在小腿连杆2(1
‑
5)上;小腿连杆2(1
‑
5)通过轴分别与足部连杆(1
‑
6)、齿轮驱动连杆(1
‑
1)和大腿连杆(1
‑
3)连接;小腿连杆1(1
‑
4)通过轴分别与齿轮驱动连杆(1
‑
1)、足部连杆(1
‑
6)连接;
7.驱动和控制机构(2),包含:驱动齿条(2
‑
1)、下支撑板(2
‑
2)、上支撑板(2
‑
3)、驱动电机(2
‑
4)、驱动电机支架(2
‑
5)、减速器(2
‑
6)、驱动法兰盘(2
‑
7)、支撑柱(2
‑
8)、光学传感器支架(2
‑
9)、光学传感器(2
‑
10)、控制系统部分(2
‑
11)、法兰盘上驱动杆(2
‑
12)、外壳(2
‑
13)、转向电机支架(2
‑
14)、转向电机(2
‑
15)、联轴器(2
‑
16)、转向浆支架(2
‑
17)、转向浆(2
‑
18);各个构件的连接关系为:下支撑板(2
‑
2)与上支撑板(2
‑
3)通过支撑柱(2
‑
8)连接形成
机器人躯干骨架;驱动齿条(2
‑
1)在下支撑板(2
‑
2)与上支撑板(2
‑
3)之间,并通过导向轨和导向槽与下支撑板(2
‑
2)与上支撑板(2
‑
3)配合形成移动副;驱动电机支架(2
‑
5)通过螺栓固定连接在上支撑板(2
‑
3)上;减速器(2
‑
6)通过螺栓固定连接在驱动电机支架(2
‑
5)上,并且与驱动电机(2
‑
4)通过轴进行配合,获取电机的扭矩;驱动电机(2
‑
4)固定连接在减速器(2
‑
6)上,为减速器提供扭矩;控制系统部分(2
‑
11)连接在上支撑板(2
‑
3)上,可处理外部信息并对机器人进行控制;光学传感器支架(2
‑
9)连接在上支撑板(2
‑
3)上;光学传感器(2
‑
10)固定连接在光学传感器支架(2
‑
9)上,用于获取外部数据反馈给控制器;驱动法兰盘(2
‑
7)连接在减速器(2
‑
6)的输出轴上,来获取减速器(2
‑
6)的扭矩;法兰盘上驱动杆(2
‑
12)固定连接在驱动法兰盘(2
‑
7)上,并与驱动齿条(2
‑
1)配合带动驱动齿条(2
‑
1)移动;转向电机支架(2
‑
14)和转向浆支架(2
‑
17)通过螺栓连接到下支撑板(2
‑
2);转向电机(2
‑
15)通过螺栓固定连接在转向电机支架(2
‑
14);转向浆(2
‑
18)通过联轴器(2
‑
16)连接在转向电机(2
‑
15)上,并通过转向浆支架(2
‑
17)来支撑;
8.驱动齿条(2
‑
1)包括齿条主体(2
‑1‑
1)、驱动凹槽(2
‑1‑
2)、导向凸台(2
‑1‑
3);驱动凹槽(2
‑1‑
2)固定连接在齿条主体(2
‑1‑
1)上用于获取法兰盘上驱动杆(2
‑
12)提供的动力;导向凸台(2
‑1‑
3)固定连接在齿条主体(2
‑1‑
1)上与下支撑板(2
‑
2)和上支撑板(2
‑
3)配合起导向作用;
9.本发明的一种仿生黑斑蛙游泳机器人,在运动过程中如图10,游泳机器人的膝关节运动曲线(3
‑
1)、踝关节运动曲线(3
‑
2)、末端点运动曲线(3
‑
3)与黑斑蛙游泳时各关节的运动曲线高度相似;
10.本发明的优点在于:
11.1.本发明提出了一种仿生黑斑蛙游泳机器人,该机器人外形结构、运动曲线高度与黑斑蛙游泳过程高度相似。
12.2.本发明的仿生黑斑蛙游泳机器人,该机器人可实现高速运动、控制简单方便,驱动少。
13.3.本发明的仿生黑斑蛙游泳机器人,该机器人通过驱动电机的回转运动转化为驱动齿条的移动副,然后驱动腿部执行机构,可做高速连续运动。
14.4.本发明的仿生黑斑蛙游泳机器人,该机器人通过转向电机带动转向浆实现转向,让游泳机器人更加灵活。
15.本发明的仿生黑斑蛙游泳机器人,结构较为简单,制作简单,仿生效果好,无论外形还是作用都贴近黑斑蛙,成本较低。
附图说明
16.图1本发明中仿生黑斑蛙游泳机器人整体示意图;
17.图2本发明中仿生黑斑蛙游泳机器人整体抛视图;
18.图3本发明中仿生黑斑蛙游泳机器人核心骨架
‑
腿部执行机构展开状态示意图;
19.图4本发明中仿生黑斑蛙游泳机器人核心骨架
‑
腿部执行机构收缩状态示意图;
20.图5本发明中仿生黑斑蛙游泳机器人腿部执行机构示意图;
21.图6和图7本发明中仿生黑斑蛙游泳机器人驱动和控制机构示意图;
22.图8本发明中仿生黑斑蛙游泳机器人驱动齿条结构示意图;
23.图9本发明中仿生黑斑蛙游泳机器人电机与驱动齿条配合示意图;
24.图10本发明中仿生黑斑蛙游泳机器人各关节运动曲线示意图;
25.图中:
[0026]1‑
腿部执行机构;2
‑
驱动和控制机构;
[0027]1‑1‑
齿轮驱动连杆;1
‑2‑
腿部基座;1
‑3‑
大腿连杆;1
‑4‑
小腿连杆1;1
‑5‑
小腿连杆2;1
‑6‑
足部连杆;
[0028]2‑1‑
驱动齿条;2
‑2‑
下支撑板;2
‑3‑
上支撑板;2
‑4‑
驱动电机;2
‑5‑
驱动电机支架;2
‑6‑
减速器;2
‑7‑
驱动法兰盘;2
‑8‑
支撑柱;2
‑9‑
光学传感器支架;2
‑
10
‑
光学传感器;2
‑
11
‑
控制系统部分;2
‑
12
‑
法兰盘上驱动杆;2
‑
13
‑
外壳;2
‑
14
‑
转向电机支架;2
‑
15
‑
转向电机;2
‑
16
‑
联轴器;2
‑
17
‑
转向浆支架;2
‑
18
‑
转向浆;
[0029]2‑1‑1‑
齿条主体;2
‑1‑2‑
驱动凹槽;2
‑4‑3‑
导向凸台;
[0030]3‑1‑
膝关节运动曲线;3
‑2‑
踝关节运动曲线;3
‑3‑
末端点运动曲线;
具体实施方式
[0031]
下面结合附图和实施例说明本发明,但本发明并不限于以下实施例。
[0032]
实施例1
[0033]
参照图1、图2、图3、图4,本发明一种仿生黑斑蛙游泳机器人,包括腿部执行机构(1)、驱动和控制机构(2);
[0034]
参照图3、图4、图5,仿生黑斑蛙游泳机器人的腿部执行机构(1),包含:齿轮驱动连杆(1
‑
1)、腿部基座(1
‑
2)、大腿连杆(1
‑
3)、小腿连杆1(1
‑
4)、小腿连杆2(1
‑
5)、足部连杆(1
‑
6);其主要通过连杆机构为游泳机器人提供前进推力;
[0035]
参照图3、图4、图6、图7,仿生黑斑蛙游泳机器人的驱动和控制机构(2),包含:驱动齿条(2
‑
1)、下支撑板(2
‑
2)、上支撑板(2
‑
3)、驱动电机(2
‑
4)、驱动电机支架(2
‑
5)、减速器(2
‑
6)、驱动法兰盘(2
‑
7)、支撑柱(2
‑
8)、光学传感器支架(2
‑
9)、光学传感器(2
‑
10)、控制系统部分(2
‑
11)、法兰盘上驱动杆(2
‑
12)、外壳(2
‑
13)、转向电机支架(2
‑
14)、转向电机(2
‑
15)、联轴器(2
‑
16)、转向浆支架(2
‑
17)、转向浆(2
‑
18);主要将驱动电机(2
‑
4)转动转化为齿条的往复移动,从而驱动腿部执行机构(1)。光学传感器(2
‑
10)、控制系统部分(2
‑
11)主要采集外部环境信息,并进行处理并各电机。转向电机(2
‑
15)带动转向浆(2
‑
18)为机器人提供转向力。
[0036]
参照图8、图9,法兰盘上驱动杆(2
‑
12)与驱动齿条(2
‑
1)上的驱动凹槽(2
‑1‑
2)配合形成仿生黑斑蛙游泳机器人的主要传动机构,将电机的回转运动转化为驱动齿条的平移运动,来实现对腿部执行机构(1)的驱动。