1.本发明涉及垃圾收集的领域,尤其涉及一种海上漂浮物机械翻斗式收集船。
背景技术:
2.相关技术中,收集船包括船体,船体的自船头到船尾,收集船依次设置有导料板、第一输送带机构、第二传送带机构以及一个收集箱,垃圾自导料板、第一输送带机构和第二传送带机构依次输送,从而输送至收集箱。一般收集箱较长,第二传送带将垃圾输送至收集箱某一位置后,工作人员需要调节垃圾的位置,从而避免垃圾无法填充收集箱的空位。由上可见,工作人员的工作负担较大,
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种海上漂浮物机械翻斗式收集船,能够较好的对垃圾进行收集。
4.本发明的第一方面实施例提供了锁扣加强板,包括:
5.船体,沿所述船体的船头到所述船体的船尾的方向为预设方向;
6.导向板,设置于船体的船头,用于使垃圾沿导向板滑动至预设位置;
7.m个收集箱,沿所述预设方向依次布设于所述船体内;
8.第一传送带,沿所述预设方向布设于船体内,所述第一传送带具有第一输入端和第一输出端,第一输入端位于预设位置,第一输出端沿预设方向延伸、并倾斜向上延伸至预设高度;
9.输送组件,包括m个第二传送带和m个驱动件,m个所述第二传送带沿预设方向依次设置于所述船体内,并与m个收集箱一一对应设置,以使所述第二传送带的垃圾分别输送至对应的所述收集箱;其中,第二传送带包括第二输入端和第二输出端,所述第二传送带活动连接于所述船体,以使相邻两个所述第一传送带能够重叠,以实现垃圾自一个所述第二传送带的第二输出端输送另一个所述第二传送带的第二输入端,并能够使相邻两个所述第一传送带能够脱离,以实现垃圾自一个所述第二传送带的第二输出端输送至对应的所述收集箱,m个所述驱动件分别与所述第二传送带相连接,用于驱动所述第二传送带运动
10.根据本发明实施例的锁扣加强板,至少具有如下技术效果:当垃圾需要输送至首部的收集箱,首部的第二传送带的第二输出端与其后一个的第二传送带的第二输入端沿预设方向错开,如此,首部的第二传送带将垃圾输送至首部的收集箱。若首部的垃圾箱装满后,第二个第二传送带在驱动件的作用下,第二个第二传送带的第二输入端与第一个的第二传送带的第二输入端沿竖向方向重合,即后一个第二传送带的第二输入端位于首部第二传送带的下方,因此,垃圾能够首部的第二传送带输送至其下一个第二传送带,从而实现将垃圾输送至下一个收集箱。
11.根据本发明的一些实施例,所述第二传送带沿所述预设方向水平滑动设置于所述船体。
12.根据本发明的一些实施例,所述第二传送带竖向转动连接于所述船体。
13.根据本发明的一些实施例,所述第二传送带为双向输送带。
14.根据本发明的一些实施例,还包括第三传送带,所述第三传送带沿预设方向上布设于所述船体内,所述第三传送带位于所述第二传送带的上方,所述第三传送带具有第三输入端和第三输出端,所述第一输出端与所述第三输入端沿所述预设方向依次分隔设置,所述第三输出端位于尾部的收集箱的上方。
15.根据本发明的一些实施例,所述第一输出端与所述第三输入端之间的间距在13cm至15cm之间。
16.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
17.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
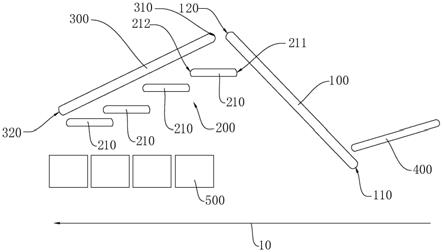
18.图1为垃圾的第一种输送结构示意图;
19.图2为垃圾的第二种输送结构示意图;
20.图3为垃圾的第三种输送结构示意图。
21.附图标记:
22.10、预设方向;100、第一传送带;110、第一输入端;120、第一输出端;200、输送组件;210、第二传送带;211、第二输入端;212、第二输出端;220、驱动件;300、第三传送带;310、第三输入端;320、第三输出端;400、导向板;500、收集箱。
具体实施方式
23.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
24.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
25.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
26.根据本发明一种海上漂浮物机械翻斗式收集船,参照图1至图3,包括船体,沿船体的船头到船体的船尾的方向为预设方向10。收集船还包括导向板400、第一传送带100、输送组件200和m个收集箱500;其中,导向板400设置于船体的头部,并向远离船体运动方向的一侧展开,如此,船体运行时,垃圾沿导向板400的侧面运动至船体的预设位置。第一传送带100沿预设方向10上布设于船体内,第一传送带100具有第一输入端110和第一输出端120,
第一输入端110位于预设位置,第一输出端120倾斜向上延伸至预设高度;m个收集箱500沿预设方向10依次设置于船体,输送组件200设置于船体,用于将垃圾分别输送至m个收集箱500。
27.进一步地,输送组件200包括m个驱动件220和m个第二传送带210,m个第二传送带210沿预设方向10依次布设于船体,第二传送带210具有第二输入端211和第二输出端212,m个第二输出端212分别与m个收集箱500一一对应设置,如此,m个第二传送带210分别将垃圾输送至对应的收集箱500。并且,m个第二传送带210分别活动连接于船体,m个驱动件220分别与第二传送带210相连接,用于驱动第二传送带210运动于船体。其中,驱动件220能够使相邻两个第二传送带210的相邻端部沿竖向方向重合,即,前一个第二传送带210的第二输出端212位于后一个第二传送端的上方,后一个第二传送带210的第二输入端211位于前一个第二传送带210的下方,从而使垃圾自前一个第二传送带210输送至后一个第二传送带210;并且,驱动件220能够使相邻两个第二传送带210的端部沿预设方向10分开,以使垃圾自前一个第二传送带210的第二输出端212输送至对应的收集箱500。
28.通过采用上述方案,当垃圾需要输送至首部的收集箱500,首部的第二传送带210的第二输出端212与其后一个的第二传送带210的第二输入端211沿预设方向10错开,如此,首部的第二传送带210将垃圾输送至首部的收集箱500。若首部的垃圾箱装满后,第二个第二传送带210在驱动件220的作用下,第二个第二传送带210的第二输入端211与第一个的第二传送带210的第二输入端211沿竖向方向重合,即后一个第二传送带210的第二输入端211位于首部第二传送带210的下方,因此,垃圾能够首部的第二传送带210输送至其下一个第二传送带210,从而实现将垃圾输送至下一个收集箱500。
29.此外,垃圾收集时,垃圾中存在较多的较大的垃圾,比如木板、泡沫、大塑胶瓶,为了对垃圾更好的分类,沿预设方向10,相邻两个第二传送带210的端部之间的距离保持在6厘米至13厘米左右,如此,即使相邻两个第二传送带210的端部存在一定的间距,尺寸较大的垃圾仍能够输送至下一个第二传送带210,直至输送至最后一个传送带,从而将尺寸较大的垃圾输送至尾部的收集箱500。需要说明的是,用户可根据具体需要,将两个第二传送带210的端部之间的距离调整至合适的大小,以便尺寸较大的垃圾通过。
30.进一步对尺寸较大的垃圾进行分类,垃圾收集时,用户可调整尾部的第二传送带210的端部与其前一个第二传送带210之间的间距,该间距相对于其它相邻两个第二传送带210端部之间的间距较大,如此,部分尺寸较大的垃圾被输送至倒数第二个收集箱500,当然,尾部的收集箱500的垃圾的尺寸大于倒数第二个收集箱500的垃圾的尺寸。
31.在一些实施离中,导向板400为朝向向上的漏斗(图中未示出),并且,导向板400竖向转动连接船体;并且,船体设置有动力件,动力件与导向板400相连接,如此,动力件驱动导向板400向上转动,从而将海面的垃圾舀起,并输送至第一传送带100。
32.在一些实施例中,第二传送带210为双向输送带,如此,相邻两个第二传送带210的输送方向可相反。因此,若相邻两个第二传送带210的端部沿预设方向10错开设置,垃圾自前一个第二传送带210输送至相应的垃圾箱的后端部的上方。若相邻两个第二传送带210的端部沿竖向方向重叠,即后一个第二传送带210的前端部位于前一个第二传送带210的下方,并位于上述收集箱500的前端部的上方,此时后一个第二传送带210将垃圾输送至该收集箱500的前端部内。通过上述方案,即使收集箱500沿预设方向10具有一定的长度,第二传
送带210也能够将垃圾均匀的输送至相应收集箱500内。
33.在一些实施例中,第二传送带210沿预设方向10水平滑动连接于船体上,自首部的第二传送带210到尾部的第二传送带210,第二传送带210的高度逐渐降低,每个驱动件220用于驱动第二传送带210的水平运动。具体的,垃圾输送时,驱动件220驱动第二传送带210沿水平方向运动,从而控制相邻两个第二传送带210沿预设方向10的间距以及沿预设方向10的重合距离。
34.在一些实施例中,第二传送带210沿预设方向10设置于船体内,第二传送带210竖向转动连接于船体,自首部的第二传送带210到尾部的第二传送带210,第二传送带210的高度逐渐降低,每个驱动件220用于驱动第二传送带210的竖向转动。通过采用上述方案,其一,驱动件220驱动第二传动带竖向转动,从而使相邻两个传送带相互重叠或相互脱离,从而使垃圾输送至相应的收集箱500;其二,第二传送带210转动至倾斜状态,第二传送带210能够使垃圾自上而下的输送,避免第二传送带210设计较高,垃圾需要自较高的位置掉落至收集箱500内,从而导致垃圾箱损坏。其三,由于首部的第二传送带210设置的位置较高,且第二传送带210为双向输送带,垃圾能够自首部的第二传送带210输送至第二个传送带,第二个第二传送带210的前端部为倾斜向下状态,第二传送带210的后端部为倾斜向上状态,垃圾自第二传送带210的前端部输送至首部的第二传动带对应的收集箱500,可见,首部的第二传送带210与第二个第二传送带210配合工作,从而将垃圾输送至较低的位置,进而输送至首部的收集箱500。
35.进一步避免较大垃圾进入输送组件200,例如木板、胶桶等,在一些实施例中,收集船还包括第三传送带300,第三传送带300沿预设方向10设置于船体内,第三传送带300倾斜位于第二传送带210的上方,第三传送带300具有第三输入端310和第三输出端320,第一输出端120与第三输入端310沿预设方向10依次分隔设置,即第三输入端310位于第一输出端120的后方,并且该间距在13cm至20cm之间,第三输出端320位于尾部的收集箱500的上方。具体的,垃圾自第一输出端120向下掉落至输送组件200时,尺寸较大的垃圾无法自第一输出端120与第三输入端310之间的间隙向下掉落,该部分垃圾自第三传送带300输送至尾部的第二收集箱500,从而实现尺寸较大的垃圾的单独收集。
36.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。