1.本实用新型涉及一种二自由度水下扑翼运动实验装置。
背景技术:
2.经探测,地球表面积的三分之二以上被江河湖泊和海洋等水面覆盖,水面以下蕴藏着丰富的生物资源和矿产资源。毋庸置疑,随着陆地资源的开发殆尽,水下资源的开发和利用对经济增长的推动作用将愈趋明显。目前用于水下观测、考察和开发的主要工具有载人潜水器和无人潜水器两种。
3.当前水下机器人多采用传统的螺旋桨作为推进器,其体积大、重量重、能耗高、综合效率低(通常小于45%)、瞬时响应有严重的滞后现象、运动灵活性能差、并且伴有较大的噪音和尾涡。螺旋桨推进器的这些缺点不利于开发具有大范围转移能力和高机动性的水下机器人。为克服螺旋桨推进器的这些缺陷,适应未来水下机器人技术发展的要求,人们在开发新能源的同时,也在积极寻找性能更加优良的新型推进与操纵方式。
4.水生动物经过上亿年的演变和进化,早己在优胜劣汰中将其在水中的运动能力发挥到了极至。其中鱼类和鲸类等哺乳动物(此处我们统称为鱼类)的游动方式具有高速、高效、灵活、低噪等特点,其游动和控制姿态的能力是任何目前装备传统的操纵与推进系统的潜器所无法比拟的,将其应用于水下机器人,将为水下机器人的研究和发展提供新的起点和更为广阔的空间。近年来仿生水下机器人技术已经成为水下机器人的重要研究方向之一,它基于仿生学原理,通过对鱼类游动机理的研究,利用机械结构、电子设备和功能材料来开发模仿鱼类的操纵和推进方式,并将其应用于水下机器人。这种新型水下机器人在战争时期,可用于水雷战和反水雷战、军事侦察和潜艇的配套武器:在和平时期,可用于复杂海洋环境下的海底测量、海洋观察、水下救生等,因此具有十分重要的意义。
5.水中生物的游动方式可粗略的分为摆动法、划动法、水翼法、喷射法等四大类。其中水生动物水翼法游动的高效率、灵活性却一直是科研人员翘首以盼的。“水翼”,是指某些水生动物的流线型运动器官。海龟、企鹅等大型水生动物,它们的前肢就是水翼。它们游动时,翼状的前肢在水中上下拍动,并不断改变水翼前缘的上翘与下沉,使水产生反作用力推动它们前进,犹如小鸟在空中拍动翅膀飞行一样,这就是动物的水翼法游动。
6.为了研究水翼运动,现有技术中存在一些仿生的机械设备,但目前大多停留在静止的水池中实现一自由度的扑动,并不能很好的模拟水生动物的灵活游动,单自由度的扑翼运动,如授权公告号为cn205122038u的中国实用新型专利所公开的一种水下扑翼运动实验装置,该装置只是一种单自由度的扑翼运动,只能研究翼板在一个自由度上的摆动而产生的推力情况,若想实现真正仿生的目的,该装置远远达不到要求,因为研究水翼运动不仅需要至少两个自由度的运动模拟、运动模拟后的测量,而且还需要模拟水生生物在非静止水下(不同流速)的运行状态并进行对应的测量,才能实现不同的研究目的。
技术实现要素:
7.本实用新型的目的在于提供一种可真实模拟海龟前肢在不同流速的水中游动状态,以检测对应的推力和升力大小,从而达到研究水翼运动的水动力特性目的的二自由度水下扑翼运动实验装置。
8.本实用新型的技术方案如下:
9.一种二自由度水下扑翼运动实验装置包括:
10.水箱;
11.扑翼机构,包括扑翼电机以及由扑翼电机驱动的翼板,扑翼电机的输出轴竖直设置,定义竖直方向为z向、前后方向为x向、左右方向为y向,翼板绕z轴往复旋转摆动;
12.摆动机构,包括摆动电机、曲柄摇杆机构和平行四杆机构,平行四杆机构与扑翼机构连接,摆动电机通过曲柄摇杆机构带动平行四杆机构运动,以带动扑翼机构绕x轴往复旋转摆动;
13.安装板,沿x方向导向滑动安装在箱体上部,所述摆动机构安装在安装板上,所述扑翼机构向下深入水箱内;
14.牵引机构,安装在水箱上,包括牵引电机、带轮和输送带,安装板相对于输送带固定,牵引电机带动输送带绕带轮旋转以带动摆动机构沿x向移动;
15.单自由度力传感器,设置在扑翼机构与摆动机构之间,以检测x向推力;
16.多自由度力传感器,设置在扑翼电机与翼板之间,以检测z向推力、绕x轴旋转的扭矩、绕z轴旋转的扭矩。
17.进一步地,摆动机构的下部具有绕x轴摆动的摆动架,摆动架上设有沿x向滑动的第一导轨和第一滑块,所述扑翼机构的上部固定在第一滑块上,第一滑块与摆动块之间设置有所述单自由度力传感器,翼板绕z轴往复旋转摆动时,第一滑块与单自由度力传感器之间产生x向推力。
18.进一步地,所述水箱为矩形,水箱的长度方向沿x向延伸,水箱的上部设有沿x向延伸的第二导轨,第二导轨上滑动装配有第二滑块,所述安装板固定在第二滑块上。
19.进一步地,所述第二导轨有两条,分别对称设置在水箱的上部两侧,每条第二导轨上对应设置一个第二滑块,两个第二滑块固定在安装板的两端。
20.进一步地,带轮包括两组驱动带轮和从动带轮,每组驱动带轮和从动带轮上绕设一条输送带,两条输送带分别对称设置在水箱的上部两侧,所述安装板的两端分别固定在两个输送带上,两个驱动带轮通过同一根驱动轴带动,驱动轴上固定有从动链轮,牵引电机上连接有主动链轮,主动链轮通过链条带动从动链轮旋转。
21.进一步地,驱动带轮和从动带轮为同步带轮,输送带为同步带。
22.进一步地,所述水箱为透明材质。
23.本实用新型的有益效果:本实用新型的一种二自由度水下扑翼运动实验装置在使用时:
24.当需要单独进行x向推力研究时,仅仅启动扑翼机构和单自由度力传感器,扑翼电机启动后带动翼板沿z向往复摆动,控制两边摆动的幅度相同,从而可以使得扑翼机构产生x向的推力,扑翼机构带动第一滑块在第一导轨上滑动,从而挤压支架上固定的单自由度力传感器,单自由度力传感器可将检测的推力数值反馈给控制系统;
25.当需要进行z向升力研究时,仅开启摆动机构和多自由度力传感器(六轴测力传感器),摆动电机带动曲柄摇杆机构动作,进而带动与之相连的平行四杆机构动作,平行四杆机构带动摆动架绕x轴往复摆动,从而带动扑翼机构同步带动,翼板产生的升力推动多自由度力传感器,从而检测z向升力,与此同时,还可利用多自由度力传感器检测绕x轴的力矩;
26.当需要检测在不同流速下的x向推力及z向升力时,可增加启动牵引机构,牵引机构启动后可通过牵引电机带动主动链轮-链条-从动链轮-驱动轴-驱动带轮-输送带等依次运动,输送带的旋转可带动与之固定的安装板沿x向滑动,安装板带动摆动机构和扑翼机构整体沿x向移动,从相对论的原理可知,扑翼机构在安装板带动下沿x向的移动速度就相对于施加的水流速度。
27.可见,采用本实用新型的二自由度水下扑翼运动实验装置试验时,能够模拟类似海龟前肢的拍水运动和翻转运动,即模拟二自由度的水翼运动,而且还可以通过改变牵引电机转速而模拟不同流速下的相应独立推力运动、升力运动和相互结合的水翼运动,还可以分析不同拍水幅值、左右摆动幅值对水动力性能的影响,通过调节曲柄的长度来控制摆动机构左右摆动的幅值,通过扑翼电机来控制翼板拍水的幅度,然后单自由度力传感器测量翼板拍水产生的推力,六自由度力传感器来测量翼板在水下运动时受到的升力大小和方向,有益于分析拍水的幅值、左右翻转的幅值、上下拍水的偏角、自身翻转偏角对水动力性能的影响等,可大大方便对于仿生机器人的研究。
附图说明
28.图1为本实用新型的一种二自由度水下扑翼运动实验装置的一种实施方式的立体结构示意图;
29.图2为图1的俯视图(较长零部件的省略采用断开画法);
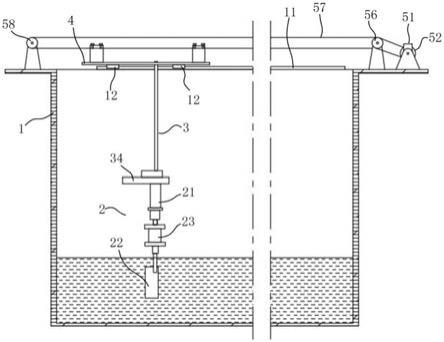
30.图3为纵向剖视的工作原理图(较长零部件的省略采用断开画法);
31.图4为图1的右上侧立体图;
32.图5为摆动机构与扑翼机构的配合结构立体图;
33.图6为摆动机构与安装板的配合结构立体图;
34.图7为牵引机构、安装板、摆动机构及扑翼机构的配合结构局部立体图;
35.图8为图7中a处的局部放大图;
36.图9为摆动架处的局部放大图;
37.图中:1-水箱,11-第二导轨,12-第二滑块,2-扑翼机构,21-扑翼电机,22-翼板,23-六轴测力传感器,3-摆动机构,31-摆动电机,32-曲柄摇杆机构,33-平行四杆机构,34-摆动架,35-第一导轨,36-第一滑块,37-支架,38-单自由度力传感器,4-安装板,5-牵引机构,51-牵引电机,52-主动链轮,53-链条,54-从动链轮,55-驱动轴,56-驱动带轮,57-输送带,58-从动带轮。
具体实施方式
38.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型,即所描述的实施例仅仅是本实用新型一部分实施例,
而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
39.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
40.需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
41.以下结合实施例对本实用新型的特征和性能作进一步的详细描述。
42.本实用新型的一种二自由度水下扑翼运动实验装置的一种实施方式:一种二自由度水下扑翼运动实验装置包括水箱1、扑翼机构2、摆动机构3、安装板4、牵引机构5、单自由度力传感器38和多自由度力传感器。定义竖直方向为z向、前后方向为x向、左右方向为y向(见图8所示坐标系)。
43.如图1-4所示,水箱1为矩形长条形结构,其长度沿x方向延伸,上部开口的四个边沿处设有向外延伸的边沿板,水箱1可采用透明材质以方便查看内部运动状态。水箱1的宽度方向的两个边沿板上分别固定设置有长度较长的第二导轨11,两根第二导轨11平行设置,且横截面可采用燕尾型或者其他常见的导轨形状。第二导轨11上滑动装配有第二滑块12,安装板4的两端固定在第二滑块12上。换句话说,第二导轨11有两条,分别对称设置在水箱1的上部两侧,每条第二导轨11上对应设置一个第二滑块12,两个第二滑块12固定在安装板4的两端。
44.牵引机构5安装在水箱1上,包括牵引电机51、带轮和输送带57,安装板4相对于输送带57固定,牵引电机51带动输送带57绕带轮旋转以带动摆动机构3沿x向移动;进一步地,带轮包括两组驱动带轮56和从动带轮58,每组驱动带轮56和从动带轮58上绕设一条输送带57,两条输送带57分别对称设置在水箱1的上部两侧,安装板4的两端分别固定在两个输送带57上,两个驱动带轮56通过同一根驱动轴55带动,驱动轴55上固定有从动链轮54,牵引电机51上连接有主动链轮52,主动链轮52通过链条53带动从动链轮54旋转。在其他实施例中,主动链轮52、从动链轮54和链条53可以替换为同步带轮和同步带。
45.如图5-9所示,扑翼机构2包括扑翼电机21以及由扑翼电机21驱动的翼板22,扑翼电机21的输出轴竖直设置,翼板22绕z轴往复旋转摆动。
46.摆动机构3包括摆动电机31、曲柄摇杆机构32和平行四杆机构33,平行四杆机构33与扑翼机构2连接,摆动电机31通过曲柄摇杆机构32带动平行四杆机构33运动,以带动扑翼机构2绕x轴往复旋转摆动;摆动机构3的下部具有绕x轴摆动的摆动架34,摆动架34上设有沿x向滑动的第一导轨35和第一滑块36,扑翼机构2的上部固定在第一滑块36上,第一滑块36与摆动块之间设置有所述单自由度力传感器38,翼板22绕z轴往复旋转摆动时,第一滑块
36与单自由度力传感器38之间产生x向推力。
47.安装板4沿x方向导向滑动安装在箱体上部,所述摆动机构3安装在安装板4上,扑翼机构2向下深入水箱1内;单自由度力传感器38设置在扑翼机构2与摆动机构3之间,以检测x向推力;多自由度力传感器设置在扑翼电机21与翼板22之间,以检测z向推力、绕x轴旋转的扭矩、绕z轴旋转的扭矩。
48.其中多自由度力传感器为mc3a型六轴测力传感器23,传感器可以感知xyz三个方向上的力和力矩(fx,fy,fz,mx,my,mz)。
49.本实用新型的一种二自由度水下扑翼运动实验装置在使用时:
50.当需要单独进行x向推力研究时,仅仅启动扑翼机构2和单自由度力传感器38,扑翼电机21启动后带动翼板22沿z向往复摆动,控制两边摆动的幅度相同,从而可以使得扑翼机构2产生x向的推力,扑翼机构2带动第一滑块36在第一导轨35上滑动,从而挤压支架37上固定的单自由度力传感器38,单自由度力传感器38可将检测的推力数值反馈给控制系统;
51.当需要进行z向升力研究时,仅开启摆动机构3和多自由度力传感器(六轴测力传感器23),摆动电机31带动曲柄摇杆机构32动作,进而带动与之相连的平行四杆机构33动作,平行四杆机构33带动摆动架34绕x轴往复摆动,从而带动扑翼机构2同步带动,翼板22产生的升力推动多自由度力传感器,从而检测z向升力,与此同时,还可利用多自由度力传感器检测绕x轴的力矩;
52.当需要检测在不同流速下的x向推力及z向升力时,可增加启动牵引机构5,牵引机构5启动后可通过牵引电机51带动主动链轮52-链条53-从动链轮54-驱动轴55-驱动带轮56-输送带57等依次运动,输送带57的旋转可带动与之固定的安装板4沿x向滑动,安装板4带动摆动机构3和扑翼机构2整体沿x向移动,从相对论的原理可知,扑翼机构2在安装板4带动下沿x向的移动速度就相对于施加的水流速度。
53.可见,采用本实用新型的二自由度水下扑翼运动实验装置试验时,能够模拟类似海龟前肢的拍水运动和翻转运动,即模拟二自由度的水翼运动,而且还可以通过改变牵引电机51转速而模拟不同流速下的相应独立推力运动、升力运动和相互结合的水翼运动,还可以分析不同拍水幅值、左右摆动幅值对水动力性能的影响,通过调节曲柄的长度来控制摆动机构3左右摆动的幅值,通过扑翼电机21来控制翼板22拍水的幅度,然后单自由度力传感器38测量翼板22拍水产生的推力,六自由度力传感器来测量翼板22在水下运动时受到的升力大小和方向,有益于分析拍水的幅值、左右翻转的幅值、上下拍水的偏角、自身翻转偏角对水动力性能的影响等,可大大方便对于仿生机器人的研究。
54.以上所述,仅为本实用新型的较佳实施例,并不用以限制本实用新型,本实用新型的专利保护范围以权利要求书为准,凡是运用本实用新型的说明书及附图内容所作的等同结构变化,同理均应包含在本实用新型的保护范围内。