1.本实用新型涉及无人机领域,具体是一种无人机抓取装置。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.得益于技术进步和资本推动,近年来无人机呈现出前所未有的发展,并广泛应用在工业、农业、军事等行业。例如可以利用无人机作为飞行平台,搭载药箱、喷洒设备或者监测设备,对农田进行喷药或者数据采集。或者利用携带摄像机装置的无人机,开展大规模航拍,实现空中俯瞰的效果。装配有高清数码摄像机和照相机以及gps定位系统的无人机,可沿电网进行定位自主巡航,实时传送拍摄影像,监控人员可在电脑上同步收看与操控。还可以利用无线电遥控设备和自备的程序控制装置操纵的无人机运载包裹,自动送达目的地。
4.随着无人机在各行各业越来越广泛的运用,现在迫切需要一些具有拾取或抓取功能的无人机和无人机的辅助装置。
5.现有的无人机中,已经有了一些无人机具备上述的功能,但是在抓取一些易碎物品的时候,由于缺少对物品的固定措施,会由于物体的晃动和无人机发生碰撞从而发生损坏,这降低了无人机抓取物体时的安全性。
技术实现要素:
6.本实用新型的目的在于提供一种无人机抓取装置,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种无人机抓取装置,包括连接板和安装在连接板底部的机械爪,所述连接板的顶面与多个竖直均匀分布的连接杆的底端固定连接,连接杆的顶端与顶板的底面固定连接,顶板的底面边缘处与多个竖直均匀分布的自由伸缩杆的顶端固定连接,自由伸缩杆的底端与升降环的顶面固定连接,所述机械爪主要由第一连接臂、和第二连接臂和爪头构成,第一连接臂的顶端通过铰链与连接板的底面转动连接,第一连接臂的底端通过销钉与第二连接臂的顶端转动连接,第二连接臂的底端固定有爪头,第一连接臂的中部与竖直安装的第一电动伸缩杆的底端铰接,第一电动伸缩杆的顶端焊接固定有滑块,滑块滑动安装在连接板的底面,第二连接臂的中部与水平安装的第二电动伸缩杆的一端铰接,第二电动伸缩杆的另一端焊接固定有固定块,固定块焊接固定在升降环的内壁上。
9.作为本实用新型进一步的方案:所述爪头与第二连接臂一体成型。
10.作为本实用新型进一步的方案:所述机械爪为六个且围绕连接板的圆心呈环形均匀分布。
11.作为本实用新型进一步的方案:所述升降环的底面通过胶水固定有耐磨垫,耐磨垫的由聚氯丁二烯橡胶制作而成。
12.作为本实用新型进一步的方案:所述连接板的底面中部通过螺钉固定安装有摄像头,连接板的底面通过螺钉固定有多个围绕摄像头均匀分布的led灯。
13.与现有技术相比,本实用新型的有益效果是:
14.通过机械爪的结构设计,配合第一电动伸缩杆和第二电动伸缩杆的作用,将机械爪内的物体夹持住,从而使无人机在飞行过程中,有效避免了物体发生晃动,提高了无人机抓取物体的稳定性。
15.通过led灯的结构设计,在抓取物体时,不仅能够起到照明的作用,还能够起到定位作用,使用方便。
附图说明
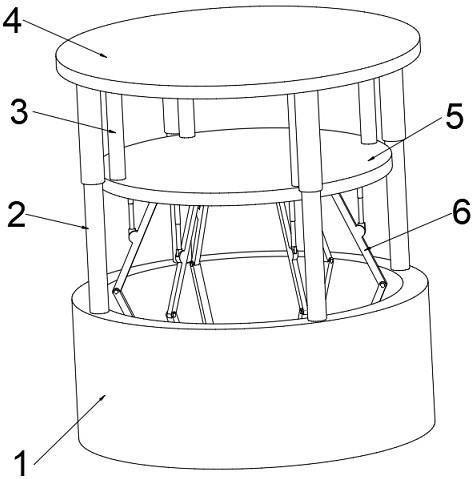
16.图1为一种无人机抓取装置的结构示意图。
17.图2为一种无人机抓取装置的剖面图。
18.图3为一种无人机抓取装置中连接板底部的结构示意图。
19.如图所示:升降环1、自由伸缩杆2、连接杆3、顶板4、连接板5、第一连接臂6、滑块7、第一电动伸缩杆8、第二连接臂9、固定块10、第二电动伸缩杆11、耐磨垫12、爪头13、led灯14、摄像头15。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1~3,本实用新型实施例中,一种无人机抓取装置,包括连接板5和安装在连接板5底部的机械爪,所述连接板5的顶面与多个竖直均匀分布的连接杆3的底端固定连接,连接杆3的顶端与顶板4的底面固定连接,顶板4的底面边缘处与多个竖直均匀分布的自由伸缩杆2的顶端固定连接,自由伸缩杆2的底端与升降环1的顶面固定连接,所述机械爪主要由第一连接臂6、和第二连接臂9和爪头13构成,第一连接臂6的顶端通过铰链与连接板5的底面转动连接,第一连接臂6的底端通过销钉与第二连接臂9的顶端转动连接,第二连接臂9的底端固定有爪头13,且爪头13与第二连接臂9一体成型,第一连接臂6的中部与竖直安装的第一电动伸缩杆8的底端铰接,第一电动伸缩杆8的顶端焊接固定有滑块7,滑块7滑动安装在连接板5的底面,第二连接臂9的中部与水平安装的第二电动伸缩杆11的一端铰接,第二电动伸缩杆11的另一端焊接固定有固定块10,固定块10焊接固定在升降环1的内壁上。
22.所述机械爪为六个且围绕连接板5的圆心呈环形均匀分布。
23.在使用时,通过第二连接臂9收缩,将机械爪张开,然后将需要抓取的物体套在机械爪之间,此时驱动第二连接臂9,使机械爪收缩,将物体抓取到机械爪之间,然后驱动第一伸缩杆8伸长,使第一连接臂6向下压,然后通过第一连接臂6和第二连接臂9将机械爪之间的物体夹持住,从而使无人机在飞行过程中,有效避免了物体发生晃动,提高了无人机抓取物体的稳定性。
24.需要说明的是,第一电动伸缩杆8和第二电动伸缩杆11均由人工通过无人机内置
的无线信号传输模块进行远程控制,而通过无线技术控制无人机为现有成熟技术,在此不做赘述。
25.所述升降环1的底面通过胶水固定有耐磨垫12,耐磨垫12的由聚氯丁二烯橡胶制作而成。
26.所述连接板5的底面中部通过螺钉固定安装有摄像头15,连接板5的底面通过螺钉固定有多个围绕摄像头15均匀分布的led灯14。
27.在实际使用中,由led灯14进行照明,并使物体位于led灯14形成的环形光圈内,从而通过led灯14对要抓取的物体进行定位,并由摄像头15进行监控,方便人工远程操控,而无人机中的摄像头通过无线技术传输画面信号的技术为现有成熟技术,在此不做赘述。
28.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内,且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
技术特征:
1.一种无人机抓取装置,包括连接板(5)和安装在连接板(5)底部的机械爪,其特征在于,所述连接板(5)的顶面与多个竖直均匀分布的连接杆(3)的底端固定连接,连接杆(3)的顶端与顶板(4)的底面固定连接,顶板(4)的底面边缘处与多个竖直均匀分布的自由伸缩杆(2)的顶端固定连接,自由伸缩杆(2)的底端与升降环(1)的顶面固定连接,所述机械爪主要由第一连接臂(6)、和第二连接臂(9)和爪头(13)构成,第一连接臂(6)的顶端通过铰链与连接板(5)的底面转动连接,第一连接臂(6)的底端通过销钉与第二连接臂(9)的顶端转动连接,第二连接臂(9)的底端固定有爪头(13),第一连接臂(6)的中部与竖直安装的第一电动伸缩杆(8)的底端铰接,第一电动伸缩杆(8)的顶端焊接固定有滑块(7),滑块(7)滑动安装在连接板(5)的底面,第二连接臂(9)的中部与水平安装的第二电动伸缩杆(11)的一端铰接,第二电动伸缩杆(11)的另一端焊接固定有固定块(10),固定块(10)焊接固定在升降环(1)的内壁上。2.根据权利要求1所述的一种无人机抓取装置,其特征在于,所述爪头(13)与第二连接臂(9)一体成型。3.根据权利要求1所述的一种无人机抓取装置,其特征在于,所述机械爪为六个且围绕连接板(5)的圆心呈环形均匀分布。4.根据权利要求1所述的一种无人机抓取装置,其特征在于,所述升降环(1)的底面通过胶水固定有耐磨垫(12),耐磨垫(12)的由聚氯丁二烯橡胶制作而成。5.根据权利要求1所述的一种无人机抓取装置,其特征在于,所述连接板(5)的底面中部通过螺钉固定安装有摄像头(15),连接板(5)的底面通过螺钉固定有多个围绕摄像头(15)均匀分布的led灯(14)。
技术总结
本实用新型公开了一种无人机抓取装置,涉及无人机领域,具体包括连接板和安装在连接板底部的机械爪,所述连接板的顶面与多个竖直均匀分布的连接杆的底端固定连接,连接杆的顶端与顶板的底面固定连接,顶板的底面边缘处与多个竖直均匀分布的自由伸缩杆的顶端固定连接,自由伸缩杆的底端与升降环的顶面固定连接。本实用新型通过机械爪的结构设计,配合第一电动伸缩杆和第二电动伸缩杆的作用,将机械爪内的物体夹持住,从而使无人机在飞行过程中,有效避免了物体发生晃动,提高了无人机抓取物体的稳定性。通过LED灯的结构设计,在抓取物体时,不仅能够起到照明的作用,还能够起到定位作用,使用方便。使用方便。使用方便。
技术研发人员:赖桂斌
受保护的技术使用者:邯郸昌田机器人科技有限公司
技术研发日:2021.05.28
技术公布日:2022/1/18