1.本实用新型涉及无人机领域,具体的涉及一种运输无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。随着无人机小型化的发展和性能的提高,目前越来越多的物流公司开始试点采用无人机进行配送以提高运输的时效性。
3.然而现有的无人机的运货方式存在以下缺陷:1、目前无人机的配送方式都是在无人机的底部吊装或固定一件货物进行运输,这种方式运输过程中货物是裸露在外面的,会因为风吹雨淋使货物受到损坏。2、此外现有的运输无人机都是根据预设指令飞行到指定地点再将货物放下,在这个过程中只能收到送货方(物流配送相关人员)的远程控制指令,而现场接受货物的收货人缺乏与无人机互动的方式。3、运输无人机到达送货地点后无法判断当前所在位置的人员是否为实际取货人,存在货物被冒领的隐患。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种运输无人机,能够避免运输过程中货物裸露在外,并且可以解决无法与收货人互动以及无法识别收货人身份的问题。
5.根据本实用新型实施例的一种运输无人机,包括:机身,所述机身后端设置有机尾,所述机身前端设置有机头,所述机身内开设有与外界相通的储物仓;旋翼模组,所述旋翼模组包括设置在机身两侧的可倾转旋翼和设置在机尾上的水平旋翼;驱动装置,所述驱动装置位于所述机身内并且与所述旋翼模组相连以用于提供驱动力;舱门,所述舱门位于所述储物仓的开口处,所述舱门上设置有动力装置以用于控制舱门的开闭;传感器模组,所述传感器模组设置在机头上以用于识别收货人的身份和手势命令;无线通信模块,所述无线通信模块用于与远程终端通讯;主控模块,所述主控模块分别与所述传感器模组、无线通信模块、驱动装置和动力装置电性连接。
6.根据本实用新型实施例的一种运输无人机,至少具有如下技术效果:本实用新型实施方式在机身内开设有储物仓,将货物放置在储物仓内并且闭合舱门使货物与外界隔绝,在运输过程中不会受到风吹雨淋的影响,可以避免货物受损。在机头前端设置有传感器模组,主控模块通过传感器模组不仅可以识别收货人的身份,避免冒领,还通过传感器模组识别收货人的手势动作做出相应的互动反馈。
7.根据本实用新型的一些实施例,所述水平旋翼为两个,分别对称设置在机尾的两侧。
8.根据本实用新型的一些实施例,两个所述水平旋翼的间距小于两个所述可倾转旋翼的间距。
9.根据本实用新型的一些实施例,所述动力装置为液压伸缩支架。
10.根据本实用新型的一些实施例,所述机头的前端开设有传感器安装槽,所述传感器模组安装在所述传感器安装槽内,所述传感器安装槽外设置有挡风玻璃。
11.根据本实用新型的一些实施例,所述传感器模组包括动作捕捉传感器、距离传感器和摄像头,动作捕捉传感器、距离传感器和摄像头分别与所述主控模块电性连接。
12.根据本实用新型的一些实施例,所述传感器安装槽内还设置有投影装置以用于将显示信息投影到挡风玻璃上。
13.根据本实用新型的一些实施例,所述驱动装置采用电机。
14.根据本实用新型的一些实施例,还包括照明灯,所述照明灯安装在所述机身或机头上。
15.根据本实用新型的一些实施例,还包括脚架,所述脚架设置在机身的底部。
16.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
17.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
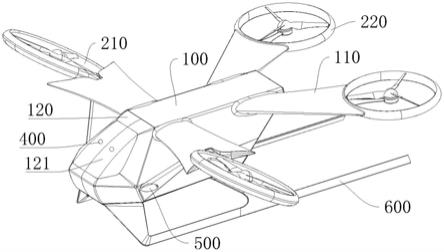
18.图1为本实用新型实施例中运输无人机的前视图;
19.图2为本实用新型实施例中运输无人机的后视图。
20.附图标号
21.机身100、机尾110、机头120、挡风玻璃121、可倾转旋翼210、水平旋翼220、舱门300、传感器模组400、照明灯500、脚架600。
具体实施方式
22.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
23.在实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.在实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
25.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
26.参考图1和图2,一种运输无人机,包括:机身100,机身100后端设置有机尾110,机
身100前端设置有机头120,机身100内开设有与外界相通的储物仓,还包括旋翼模组、驱动装置、自动开闭舱门300、传感器模组400、无线通信模块和主控模块。
27.其中,旋翼模组包括两个可倾转旋翼210和两个水平旋翼220,两个可倾转旋翼210分别安装在机身100两侧的机翼上,通过可倾转旋翼210 角度的变化,无人机可以旋转方向,从而改变飞行轨迹。两个水平旋翼 220分别对称安装在机尾110两侧的尾翼上,两个水平旋翼220的间距小于两个可倾转旋翼的间距。水平旋翼220也可以只采用一个,当水平旋翼220只有一个时需要安装在机尾的中轴线上以保持飞行平衡。
28.驱动装置安装在机身100内,其中,本实施例中驱动装置采用电机,通过电机给可倾转旋翼210和水平旋翼220提供驱动力,电机和旋翼之间的连接关系采用无人机领域的常规技术手段,本实用新型不再详细描述。
29.本实施例中机身、机头和机尾采用铝合金焊接而成,重量轻并且结构坚固。参考图2,机身100内开设有储物仓,储物仓的开口设置在机身的后端,储物仓的开口处设置有舱门300,舱门300通过合页实现转动,为了实现自动开闭,舱门300上设置有动力装置,本实施例中动力装置为液压伸缩支架310,其一端固定在舱门300上,另一端固定在储物仓的内顶壁上,通过液压实现舱门300的自动升降。当然,除了液压伸缩支架310以外还可以采用伸缩电机等动力装置实现舱门300的自动开闭。
30.主控模块包括处理器和相关电路,处理器通过相关电路分别与传感器模组400、无线通信模块、驱动装置和动力装置电性连接,处理器一方面接收传感器模组400反馈的各种信号来进行运算和处理,另一方面通过无线通信模块与后台通信,发出控制信号来驱动旋翼模组的运行以及舱门300的开闭。
31.参考图1,机头120的前端开设有传感器安装槽,传感器模组400 安装在传感器安装槽内,传感器安装槽外设置有挡风玻璃121,挡风玻璃 121采用钢化玻璃,可以更好地保护传感器模组400。其中,本实施例中传感器模组400包括分别与处理器电性连接的动作捕捉传感器、距离传感器和摄像头,其作用是身份确认的人脸识别和识别指挥手势。摄像头也可以拍摄实时飞行画面传送回后台。无线通信模块采用卫星通信模块,通过卫星通信进行信息传输和定位,既可以传输摄像头拍摄的画面还可以接收后台发送的控制命令来控制无人机的飞行状态,还可以采用4g,5g 模块来与手机通讯,通过更换不同型号芯片的主控模块能够实现更多功能,例如当无人机通过收件人的手机定位到在一定范围内,无人机会调整机身使机头120的传感器模组400面对收件人,并通过收件人的手势指挥降落在稳定平面,或是al识别着陆点。到达指定地点后进行人脸识别签收,自动打开舱门300让收件人取货。
32.传感器安装槽内还设置有投影装置,可以将显示信息投影到挡风玻璃121上,例如显示收货人名字以便核实信息,还可以通过显示信息告知收货人如何将货物从储物仓内取出,投影装置可以采用hud。
33.为了便于夜间照明,还包括照明灯500,照明灯500安装在机身100 或机头120上,本实施例中照明灯500为两个,分别安装在机头的两侧,满足夜间任务的需要。为了方便停放,机身100的底部设置有脚架600。
34.综上所述,本实用新型实施方式在机身100内开设有储物仓,将货物放置在储物仓内并且闭合舱门300使货物与外界隔绝,在运输过程中不会受到风吹雨淋的影响,可以避免
货物受损。在机头120前端设置有传感器模组400,无人机通过传感器模组400不仅可以识别收货人的身份,避免冒领,还通过传感器模组400识别收货人的手势动作做出相应的互动反馈。
35.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。