一种多旋翼无人机组装定位装置
【技术领域】
1.本实用新型属于无人机技术领域,具体涉及一种多旋翼无人机组装定位装置。
背景技术:
2.随着科技的发展,旋翼无人机在军用和民用领域受到了越来越多的关注,并开展了广泛的应用。旋翼无人机在军事应用上,主要是作为靶机和完成军事侦查工作;在民用领域中,最常见的是旋翼无人机机型,它主要应用于应急救灾、科学探测、农林植保以及商业航拍中。
3.无人机的机身与旋翼臂是通过连接件利用螺纹连接的,即连接件分为两部分,一部分的一端与无人机机身粘接,另一端设置有外螺纹,另一部分的一端与旋翼臂粘接,另一端设置内螺纹,两部分通过螺纹连接;但是,在生产过程中无法保证两部分的位置精度。另外,无人机生产组装最重要的精度要求就是最终要保证各电机螺旋桨处于水平状态。目前很多的无人机生产厂家主要是通过单元组装,从局部到整体分步进行,最后再将各个单元组装起来,前一单元组装完成后需要等待结构胶固化后再进行下一单元的组装,组装效率低下。
技术实现要素:
4.为了解决上述问题,本实用新型提供一种多旋翼无人机组装定位装置,所述装置能够保证无人机电机螺旋桨处于水平状态,保证安装精度,提高组装效率。
5.为了实现上述目的,本实用新型采用如下技术方案:一种多旋翼无人机组装定位装置,包括工作台,所述工作台上表面中心位置设置有机身固定座,所述机身固定座的周围固定设置有多条直线导轨,所述直线导轨的顶部通过滑块滑动连接有旋翼臂固定座。
6.优选地,所述机身固定座包括固定座下板和固定座上板,所述固定座下板固定在工作台的上表面,与固定座上板之间通过固定柱连接,所述固定柱的外表面设置有螺纹,其上端与固定座上板固定连接,下端穿过固定座下板及工作台上表面,并在工作台的下方和固定座下板的上方分别通过一个锁止螺母锁紧固定,当需要调整固定座上板的高度时,将两个锁止螺母拧松,调整至合适高度之后再将两个锁止螺母拧紧即可。
7.优选地,所述旋翼臂固定座的上表面设置有与旋翼臂形状相匹配的凹槽,在使用时将旋翼臂嵌入凹槽内固定,防止在滑动旋翼臂固定座时,旋翼臂与旋翼臂固定座分离。
8.优选地,所述旋翼臂固定座上的凹槽内设置一安装孔,所述安装孔设置在远离机身固定座一端的凹槽的中心位置,所述安装孔内设置一支撑结构,为电机平衡板的安装提供支撑、定位。
9.优选地,所述支撑结构包括支撑台、固定在支撑台底部的支撑柱以及套在支撑柱外的支撑套,所述支撑套的侧面设置有螺纹孔,通过顶紧螺栓将支撑套固定在支撑柱外。
10.优选地,所述安装孔的直径小于支撑套的直径,在使用时,将支撑柱放置在安装孔内,支撑套位于安装孔之上;通过调整支撑套在支撑柱上的位置,调整支撑台的高度,当需
要调节支撑台的高度时,将顶紧螺栓拧松,将支撑套调整到合适位置后再将顶紧螺栓拧紧即可,为电机平衡板的安装提供定位,防止电机安装后,其上表面高出旋翼臂。
11.优选地,所述工作台的底部设置有地脚螺栓,用于调节工作台的高度,使得工作台始终处于水平状态。
12.优选地,所述旋翼臂固定座与滑块通过螺栓连接,使得旋翼臂固定座可以更换,以适应不同规格旋翼臂的组装需求。
13.优选地,所述滑块上设置有锁定结构,当将旋翼臂组装到位后,将滑块锁紧固定,防止在结构胶固化过程中滑块滑动,导致组装不精确。
14.与现有技术相比,本实用新型具有以下有益效果:
15.(1)本实用新型所述无人机旋翼臂通过旋翼臂固定座固定,利用滑块滑动将旋翼臂、连接件与机身连接,无需等待结构胶固化即可进行下一组装工作,提高了组装效率;
16.(2)本实用新型所述支撑结构的设置为平衡板的安装提供了定位,保证平衡板处于水平状态,且所述支撑结构的高度可调,可以根据电机的厚度不同调整支撑台的高度,提高了安装精度;
17.(3)本实用新型所述装置可以适用于多种规格无人机的组装需求,适应性强,结构简单,组装方便。
【附图说明】
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
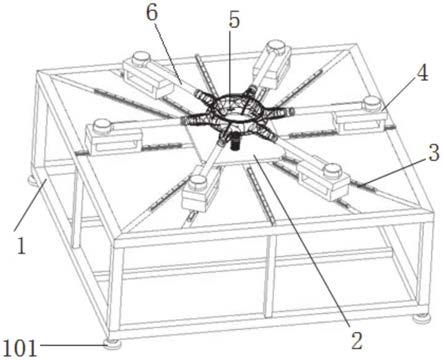
19.图1是本实用新型所述组装定位装置的结构示意图;
20.图2是本实用新型所述机身固定座的结构示意图;
21.图3是本实用新型所述旋翼臂固定座与支撑结构相配合的结构示意图;
22.图4是本实用新型所述支撑结构的结构示意图;
23.其中:1-工作台;101-地脚螺栓;2-机身固定座;201-固定座下板;202-固定座上板;203-固定柱;204-锁止螺母;3-直线导轨;4-旋翼臂固定座;401-凹槽;5-机身;6-旋翼臂;7-支撑结构;701-支撑台;702-支撑柱;703-支撑套;704-螺纹孔。
【具体实施方式】
24.为使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例,对本实用新型做进一步描述。
25.如图1和2所示,本实用新型提供了一种多旋翼无人机组装定位装置,包括工作台1,所述工作台1的上表面中心位置设置有机身固定座2,所述机身固定座2的周围固定设置有多条直线导轨3,所述直线导轨3由靠近机身固定座2的一端向远离机身固定座2的一端延伸,所述直线导轨3的顶部通过滑块滑动连接有旋翼臂固定座4。
26.如图2所示,所述机身固定座2包括固定座下板201和固定座上板202,所述固定座下板201固定在工作台1的上表面,与固定座上板202之间通过固定柱203连接,所述固定柱
203的外表面设置有螺纹,其上端与固定座上板202固定连接,下端穿过固定座下板201及工作台1上表面,并在工作台的下方和固定座下板201的上方分别通过一个锁止螺母204锁紧固定,当需要调整固定座上板202的高度时,分别将两个锁止螺母204拧松,调整至合适高度之后再将两个锁止螺母204拧紧即可。
27.作为优选,所述旋翼臂固定座4的上表面设置有与旋翼臂6形状相匹配的凹槽401,在使用时将旋翼臂6嵌入凹槽401内固定,防止在滑动旋翼臂固定座4时,旋翼臂6与旋翼臂固定座4分离。
28.作为优选,如图3所示,所述旋翼臂固定座4上的凹槽401内设置一安装孔,所述安装孔设置在远离机身固定座一端的凹槽的中心位置,所述安装孔内设置一支撑结构7,为电机平衡板的安装提供支撑、定位。
29.作为优选,如图4所示,所述支撑结构包括支撑台701、固定在支撑台701底部的支撑柱702以及套在支撑柱702外的支撑套703,所述支撑套703的侧面设置有螺纹孔704,利用顶紧螺栓将支撑套固定在支撑柱702外。
30.作为优选,所述安装孔的直径小于支撑套703的直径,在使用时,将支撑柱702放置在安装孔内,支撑套703位于安装孔之上;通过调整支撑套703在支撑柱上的位置,调整支撑台701的高度,当需要调节支撑台701的高度时,将顶紧螺栓拧松,将支撑套703调整到合适位置后再将顶紧螺栓拧紧即可,为电机平衡板的安装提供定位,防止电机安装后,其上表面高出旋翼臂。
31.作为优选,所述工作台1的底部设置有地脚螺栓101,用于调节工作台高度,使得工作台始终处于水平状态。
32.作为优选,如图1所示,本实施例中所述直线导轨设置有12条,其中8条直线导轨将工作台的上表面平均分为8部分,另外4条直线导轨间隔设置在8条直线导轨中,使得可以适应于两旋翼、四旋翼、六旋翼、八旋翼无人机的组装需求。
33.作为优选,所述旋翼臂固定座4与滑块通过螺栓连接,使得旋翼臂固定座可以更换,以适应不同规格旋翼臂的组装需求。
34.本实用新型所述多旋翼无人机组装定位装置的使用过程:先将机身放置在机身固定座2上,然后调节锁止螺母204将机身调节至合适高度,将所有旋翼臂固定座4滑动到远离机身固定座2的一端,将需要组装的旋翼臂嵌入旋翼臂固定座的凹槽401内,将连接件的两端分别涂抹结构胶,放置在机身与旋翼臂之间,滑动旋翼臂固定座4将旋翼臂、连接件与机身连接在一起,锁定滑块,防止结构胶固化过程中旋翼臂固定座滑动;然后组装下一旋翼臂,组装完成且结构胶固化后,调节支撑台701的高度,使得电机平衡板与旋翼臂以一定的相对位置打胶粘结,待胶固化后,即可取下无人机。
35.以上所述实施例仅表达了本实用新型的某种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。