1.本发明属于航空航天技术领域,并涉及航空技术领域,尤其涉及飞行器系统技术中的飞行控制系统技术领域,具体涉及一种高层病房用无人机智能输送系统。
背景技术:
2.随着城市的发展壮大,城市人口越来越多,城市用地制约着城市的发展,也限制着医院用地面积,但增加的人口需要更多的配套病房,因此,新建医院病房的楼层在逐渐增加,而随着高层病房的增多,高层病房所需要的输送系统亟需解决,现有高层病房对于医疗物资的输送一般采用货运电梯,由于病房楼层较高,在进行医疗物资的输送过程中需要在每层楼内上下,将各个楼层所需的医疗物资输送到指定位置内,不仅消耗大量时间,还需要专人对医疗物资进行搬运,当出现紧急医疗物资的输送时,例如器官移植等的输送,甚至需要医护人员通过步梯进行紧急跑步等方式进行传递,不仅会严重影响紧急医疗物资的输送效率,输送过程中还容易出现紧急医疗物资损坏等问题的产生,也容易导致患者出现危险状况,容易导致移植的器官出现意外状况等。
技术实现要素:
3.为了解决高层病房输送医疗物资时引发的一系列问题,提供一种能够进行智能化高效率输送、通过无人机与轨道传输的无缝结合实现对医疗物资的定点输送、能够对紧急物资进行实时输送的高层病房用无人机智能输送系统。
4.基于上述目的,本发明通过如下技术方案实现:一种高层病房用无人机智能输送系统,包括无人机输送系统和与无人机输送系统相配合的智能控制系统;无人机输送系统包括无人机输送机构、与无人机输送机构相配合的输送轨道机构,无人机输送机构包括无人机本体,无人机本体底端设有无人机起落架,顶端设有多个相对无人机中心对称的无人机旋翼,无人机本体内设有无人机处理器,无人机处理器连接有无线信号处理模块、无人机数据处理模块;无人机本体上设有与输送轨道机构相配合的轨道传输结构。
5.优选地,智能控制系统包括远程控制壳体,远程控制壳体上设有触摸显示屏,远程控制壳体的背面设有壳体固定结构,远程控制壳体内设有远程处理器,远程处理器连接有数据分析处理模块、与无线信号处理模块相配合的远程信号处理模块;远程控制壳体顶端设有至少两个发光报警柱,发光报警柱顶端均设有声音报警器。
6.优选地,无人机输送机构还包括设置在无人机本体底端的医疗物资输送结构,医疗物资输送结构包括设置在无人机起落架上的支架调节结构,支架调节结构包括一对相对无人机起落架轴心所在竖直平面镜面对称的支架调节器,支架调节器均包括设置在无人机起落架上的支架转筒,支架转筒两端均设有与无人机起落架转动连接的转筒轴承,支架转筒上设有转筒连杆,转筒连杆远离支架转筒的一端设有调节套筒,调节套筒内套设有与调节套筒转动连接的支架调节轴,支架调节轴上设有与调节套筒间隙配合的支架支撑杆。
7.优选地,无人机本体底端设有分别与支架调节器相配合的调节电动推杆,调节电动推杆的活动端通过电动推杆转轴与转筒连杆转动连接;调节套筒上设有套筒调节电机,套筒调节电机通过减速齿轮与设置在支架调节轴上的支架调节齿轮相配合;支架支撑杆底端设有支撑凸起,支撑凸起上设有支撑垂轴,支撑垂轴上设有与支撑垂轴活动连接的垂轴支撑脚;调节电动推杆、套筒调节电机均与无人机处理器电性连接;医疗物资输送结构还包括设置在无人机本体上与支架调节结构、无人机起落架间隙配合的物资暂储结构;转筒连杆上设有支架限位器,支架限位器包括设置在转筒连杆上的限位转轴,限位转轴上设有限位凸轮,限位凸轮与设置在转轴连杆上的限位杆相配合,限位杆上套设有与转轴连杆相连接的限位套筒,限位套筒远离支架调节齿轮的一端设有复位弹簧;限位凸轮上设有与限位杆相配合的弧型限位槽,限位杆与支架调节齿轮间隙配合;转筒连杆上设有与限位转轴相配合的限位电机;限位电机与无人机处理器电性连接;调节套筒内设有与支架调节轴相配合的支架复位弹簧。
8.优选地,轨道传输结构包括设置在无人机本体顶端的隐藏凹槽,隐藏凹槽内设有传输调节器,隐藏凹槽上设有一对相互配合的旋转盖板,旋转盖板通过盖板转轴与无人机本体相连接,无人机本体内设有与盖板转轴相配合的盖板电机;传输调节器包括两个相对隐藏凹槽中心对称的可伸缩调节杆,可伸缩调节杆与设置在隐藏凹槽中心上的传输电动推杆间隙配合,传输电动推杆活动端设有一对间隙配合且与可伸缩调节杆顶端相连接的传输推杆转轴,传输推杆转轴上设有相互配合的传输挡翅,传输挡翅均通过一对间隙配合的挡翅转筒与传输推杆转轴转动连接,挡翅转筒内设有与传输推杆转轴相配合的转筒弹簧。
9.优选地,传输调节器还包括与传输挡翅相配合的挡翅调节结构,挡翅调节结构包括分别与传输挡翅相配合的限位挡板,限位挡板一端设有与传输推杆转轴转动连接的挡板转筒,挡板转筒与挡翅转筒间隙配合,挡板转筒端部设有转筒齿轮,转筒齿轮与设置在限位挡板间隙内的挡翅调节板相配合。
10.优选地,挡翅调节板的两侧均设有与转筒齿轮相啮合的调节板齿条,挡翅调节板上套设有与调节板齿条间隙配合的齿条防护筒,齿条防护筒通过防护筒连杆分别与设置在传输推杆转轴上的防护筒轴承相连接;齿条防护筒上设有挡翅调节电机,挡翅调节电机活动端设有与调节板齿条相配合的挡翅调节齿轮,挡翅调节齿轮通过设置在齿条防护筒上的防护筒调节孔与调节板齿条相啮合;传输挡翅底面上均设有挡翅凹槽,挡翅凹槽内设有挡翅凹轮;挡翅调节电机与无人机处理器电性连接;挡翅调节板上设有与齿条防护筒相配合的挡翅凸起;齿条防护筒上设有与挡翅调节板相配合的挡翅限位器,挡翅限位器包括限位转轮,限位转轮上设有与调节板齿条相配合的限位轮凸起,限位转轮通过转轮转轴与齿条防护筒相连接,齿条防护筒上设有与转轮转轴相配合的转轴电机。
11.优选地,输送轨道机构包括输送凹槽,输送凹槽内部两侧均设有与挡翅凹轮相配合的输送轨道,输送轨道上均设有轨道输送器,轨道输送器包括输送壳体,输送壳体靠近传输挡翅的一端设有压力传感器,输送壳体上设有与输送轨道相配合的输送凹轮,输送凹轮通过输送同步带与设置输送壳体内的输送同步电机相配合。
12.优选地,输送壳体上设有调节转轴,调节转轴上设有固定连杆,固定连杆端部设有弧型固定卡头,弧型固定卡头与设置在传输挡翅上的固定卡孔相配合;输送壳体内设有与调节转轴相配合的输送调节电机;压力传感器、输送同步电机、输送调节电机均与远程处理
器电性连接;输送壳体内设有壳体凹槽,壳体凹槽与设置在传输挡翅上的挡翅卡板相配合。
13.优选地,传输挡翅远离挡翅转筒的一端设有挡翅转轴,挡翅转轴上设有挡翅转环;输送凹槽的侧面为弧型侧面;传输挡翅上、输送凹槽底面上设有相互配合的红外线光电开关;输送凹槽内设有多个位置传感器;红外线光电开关、位置传感器均与远程处理器相连接。
14.与现有技术相比,本发明的有益效果如下:(1)本发明通过无人机输送系统配合智能控制系统,实现了通过无人机对医疗物资的智能化高效率输送,方便对高层病房所需医疗物资进行及时转运,该输送过程大大降低了人工参与程度,降低了人工参与带来的各种问题,大幅度提升了医疗物资的输送效率,能够对紧急医疗物资进行实时输送,减少紧急医疗物资输送时产生的各种问题;无人机输送机构通过无人机本体对医疗物资在高层病房外部进行飞行输送动作,该过程通过预设程序进行智能化控制,无人机本体飞行到指定病房位置后,通过设置在病房上的轨道开口与输送轨道结构相配合,无人机飞行模式转换为轨道滑行模式,通过输送轨道机构快速输送到指定病房或手术室内,大幅度提升输送速度,还能够有效避免无人机在房间内飞行容易造成的影响患者安全,容易与房间内物品撞击等问题;通过无线信号处理模块对远程传输的信息进行收集并传输给无人机处理器,通过无人机处理器配合无人机数据处理模块对数据指令等进行分析处理,通过轨道传输结构将无人机本体与输送轨道机构相连接,实现无人机飞行模式到轨道滑行模式的转换。
15.(2)智能控制系统通过远程模式对无人机本体进行远程控制,方便及时掌握无人机位置及状态,通过触摸显示屏进行程序输入及预设,方便对无人机本体的飞行轨道进行设置,方便无人机本体对指定高层病房进行定点输送;远程处理器通过远程信号处理模块与无线信号处理模块无线连接,从而实现对无人机本体的远程控制动作;数据分析处理模块配合远程处理器对接收的数据进行快速分析处理,能够实现实时分析处理的目的;发光报警柱配合声音报警器实现声光报警提醒,能够及时提升操作人员注意,方便对出现问题的零部件进行维修或更换。
16.(3)医疗物资输送结构的设置能够将医疗物资固定在无人机本体上,方便对医疗物资实现稳定输送动作;通过支架调节结构对无人机本体位置进行调节,方便不同体积大小的医疗物资固定在无人机本体上,有效提升本发明的适用性;镜面对称的支架调节器能够保证对无人机本体位置进行调节后,无人机本体始终保持稳定状态,避免无人机本体出现倾斜、摆动、飞行失衡等问题;支架转筒通过转筒轴承与无人机本体转动连接,使得无人机本体在进行位置调整时始终处于稳定状态;转筒连杆通过调节套筒内的支架调节轴连接直接支撑杆,使得支架调节器能够实现二次调节动作,方便无人机本体实现更大的位置调整动作。
17.优选地,无人机输送机构还包括设置在无人机本体底端的医疗物资输送结构,医疗物资输送结构包括设置在无人机起落架上的支架调节结构,支架调节结构包括一对相对无人机起落架轴心所在竖直平面镜面对称的支架调节器,支架调节器均包括设置在无人机起落架上的支架转筒,支架转筒两端均设有与无人机起落架转动连接的转筒轴承,支架转筒上设有转筒连杆,转筒连杆远离支架转筒的一端设有调节套筒,调节套筒内套设有与调节套筒转动连接的支架调节轴,支架调节轴上设有与调节套筒间隙配合的支架支撑杆。
18.(4)调节电动推杆活动端通过电动推杆转轴能够推动转筒连杆沿支架转筒转动,从而带动转筒连杆伸展,使调节套筒远离无人机本体;套筒调节电机通过减速齿轮带动支架调节齿轮转动,从而使支架支撑杆与转筒连杆之间的夹角增加或减小,从而使支架支撑杆沿调节套筒伸展或收缩,从而实现支架调节器对无人机本体位置调整的目的;支撑凸起通过支撑垂轴连接有垂轴支撑脚,使垂轴支撑脚在自身重力作用下能够始终保持垂坠状态,方便支架调节器在调节过程中能够持续保持对无人机本体的支撑作用;物资暂储结构方便将医疗物资放置在其内,方便对医疗物资进行快速稳定的转运。
19.(5)隐藏凹槽配合旋转盖板,能够在无人机本体飞行期间将传输调节器隐藏在隐藏凹槽内,减少对无人机本体飞行过程中的影响,盖板电机通过盖板转轴带动旋转盖板转动,通过旋转盖板从而对隐藏凹槽进行密封动作;可伸缩调节杆与传输电动推杆相配合,能够实现稳定的伸展或收缩动作,能够稳定的将无人机本体与输送凹槽相连接;一对间隙配合的传输推杆转轴与传输挡翅相配合,方便对传输挡翅进行整体调节,方便实现传输挡翅的隐藏及伸展动作;间隙配合的挡翅转筒与转筒弹簧相配合,使得传输挡翅具有竖直伸展的作用力,在转筒弹簧作用下,传输挡翅保持竖直伸展状态,方便传输挡板进入输送凹槽内。
20.(6)挡翅调节结构配合转筒弹簧能够对传输挡翅进行调节,方便传输调节器进出输送凹槽内,方便无人机本体与输送凹槽连接或脱离;限位挡板能够对传输挡翅进行限位,使得传输挡翅固定在输送凹槽内,方便传输挡翅沿输送轨道运动;挡板转筒方便限位挡板与传输推杆转轴转动连接,方便限位挡板实现调整限位动作;转筒齿轮的设置,方便通过挡翅调节板的调节带动转筒齿轮转动,实现对两个限位挡板调整动作。
21.(7)挡翅调节板两侧调节板齿条的设置,使得挡翅调节板能够带动转筒齿轮运动,从而带动挡板转筒上的限位挡板运动,使得传输挡翅能够在限位挡板的限制下保持稳定的支撑状态,方便将传输调节器固定在输送凹槽内,方便无人机本体沿输送轨道运动;齿条防护筒的设置不仅起到对挡翅调节板的导向作用,也方便对挡翅调节板进行限位作用,防止调节板齿条脱离与转筒齿轮的啮合关系;防护筒连杆将齿条防护筒与设置在传输推杆转轴上的防护筒轴承连接,从而实现对挡翅调节板的限位作用;挡翅调节电机通过挡翅调节齿轮与调节板齿条相配合,带动调节板齿条上下移动,从而实现对传输挡翅的现在作用;挡翅凹槽内设置的挡翅凹轮,方便传输挡翅在输送轨道上运动,从而带动无人机本体沿输送凹槽运动。
22.(8)输送凹槽内的输送轨道配合挡翅凹轮,能够有效防止挡翅凹轮脱离输送轨道,轨道输送器能够带动传输挡翅在输送凹槽内移动,实现轨道输送的目的;输送壳体上的压力传感器与传输挡翅相配合,方便轨道输送器与传输挡翅相连接,实现轨道输送器带动无人机本体沿输送轨道运动的目的;输送同步电动通过输送同步带带动输送凹轮在输送轨道上运动,从而实现轨道输送器主动带动传输挡翅在输送凹槽内运动的目的。
23.(9)输送调节电机带动调节转轴在输送壳体上转动,从而带动固定连杆转动,使得固定连杆端部的弧型固定卡头进入固定卡孔内,使输送壳体与传输挡翅连接,方便轨道输送器带动传输挡翅在输送轨道上运动,方便轨道输送器带动无人机本体运动至指定位置上,实现医疗物资在病房内的输送动作。
24.(10)挡翅转轴配合挡翅转环,在传输挡翅随输送轨道运动到输送凹槽的弧形转弯
处时,挡翅转环能够与输送凹槽的弧形转弯处相接触,方便传输挡翅在弧形转弯处转向,防止挡翅凹轮脱离输送轨道,方便传输挡翅进行稳定的输送动作;红外线光电开关的设置,方便传输挡翅与输送凹槽通过红外线光电开关进行位置对应,方便传输挡翅进入输送凹槽内,从而实现无人机本体与输送凹槽的快速结合,方便对无人机本体实现轨道输送;位置传感器的设置能够及时检测到轨道输送器及传输挡翅的位置,方便确定无人机本体及轨道输送器的位置,方便实现对医疗物资的输送及控制。
25.综上,本发明将灵活飞行发无人机与固定传输的轨道相结合,通过无人机本体在高层病房外进行灵活高效的飞行输送,达到病房等室内房间后再通过输送轨道进行定点输送,不仅解决了高层病房等输送物资难、效率低等问题,通过结合输送轨道后,能够有效避免无人机本体在室内房间飞行时受到干扰强、障碍物较多、信号传输缓慢等问题,有效提升无人机的飞行安全及移动效率,有效防止无人机与活动人员之间的接触,提升无人机为高层病房输送医疗物资的效率和安全性,真正有效的解决高层病房内医疗物资快速输送的难题。
附图说明
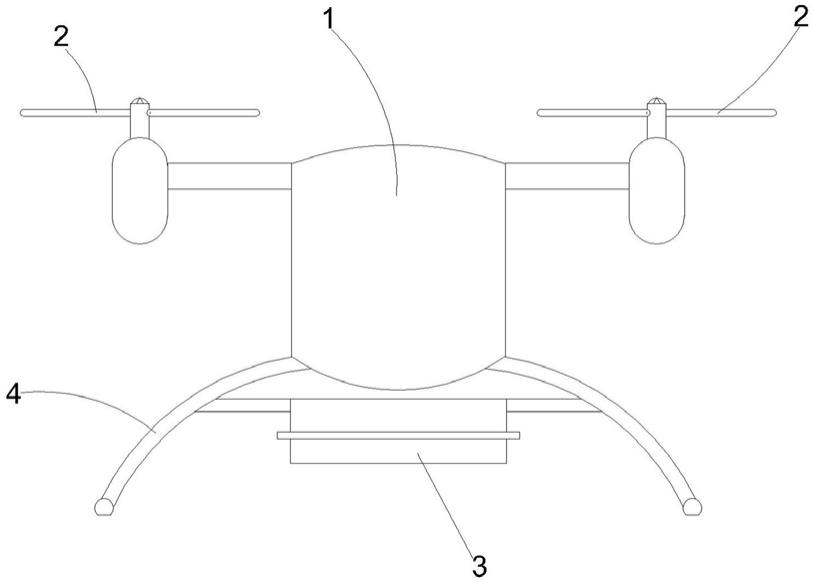
26.图1是实施例1中本发明的主视图;图2是实施例1中本发明的侧视图;图3是实施例1中智能控制系统的主视图;图4是实施例1中支架调节器的结构示意图;图5是实施例1中支架调节器的结构示意图;图6是实施例1中隐藏凹槽的结构示意图;图7是实施例1中传输调节器的结构示意图;图8是实施例1中传输挡翅的结构示意图示意图;图9是实施例1图8中a部的结构示意图;图10是实施例1中限位挡板的结构示意图;图11是实施例1中输送凹槽的结构示意图;图12是实施例1中轨道输送器的结构示意图结构示意图。
27.图中,1、无人机本体,2、无人机旋翼,3、支架调节结构,4、无人机起落架,5、远程控制壳体,6、触摸显示屏,7、发光报警柱,8、声音报警器,301、调节电动推杆,302、支架转筒,303、转筒轴承,304、转筒连杆,305、调节套筒,306、支架支撑杆,307、支撑垂轴,308、垂轴支撑脚,309、支撑凸起,310、支架调节齿轮,311、支架调节轴,312、减速齿轮,313、套筒调节电机,314、电动推杆转轴,101、隐藏凹槽,102、旋转盖板,103、盖板转轴,104、可伸缩调节杆,105、传输电动推杆,106、传输推杆转轴,107、传输推杆转轴,108、传输挡翅,109、传输挡翅,110、挡翅凹轮,111、挡翅凹槽,112、挡翅调节结构,113、限位挡板,114、限位挡板,115、转筒齿轮,116、挡翅转筒,117、防护筒轴承,118、固定卡孔,119、防护筒连杆,120、调节板齿条,121、挡翅调节电机,122、转筒齿轮,123、挡板转筒,124、齿条防护筒,125、防护筒调节孔,126、挡翅调节板,127、挡翅调节齿轮,128、挡翅转环,129、挡翅转轴,130、输送凹槽,131、输送轨道,132、输送壳体,133、输送同步电机,134、输送同步带,135、输送凹轮,136、调节转轴,137、固定连杆,138、弧型固定卡头,139、。
具体实施方式
28.以下通过具体实施例对本发明作进一步说明,但并不限制本发明的范围。
29.实施例1一种高层病房用无人机智能输送系统,其结构如图1-图12所示,其中,图5未表现调节电动推杆301、套筒调节电机313,包括无人机输送系统和与无人机输送系统相配合的智能控制系统;无人机输送系统包括无人机输送机构、与无人机输送机构相配合的输送轨道机构,无人机输送机构包括无人机本体1,无人机本体1底端设有无人机起落架4,顶端设有多个相对无人机中心对称的无人机旋翼2,无人机本体1内设有无人机处理器,无人机处理器连接有无线信号处理模块、无人机数据处理模块;无人机本体1上设有与输送轨道机构相配合的轨道传输结构。智能控制系统包括远程控制壳体5,远程控制壳体5上设有触摸显示屏6,远程控制壳体5的背面设有壳体固定结构,远程控制壳体5内设有远程处理器,远程处理器连接有数据分析处理模块、与无线信号处理模块相配合的远程信号处理模块;远程控制壳体5顶端设有至少两个发光报警柱7,发光报警柱7顶端均设有声音报警器8。
30.无人机输送机构还包括设置在无人机本体1底端的医疗物资输送结构,医疗物资输送结构包括设置在无人机起落架4上的支架调节结构3,支架调节结构3包括一对相对无人机起落架4轴心所在竖直平面镜面对称的支架调节器,支架调节器均包括设置在无人机起落架4上的支架转筒302,支架转筒302两端均设有与无人机起落架4转动连接的转筒轴承303,支架转筒302上设有转筒连杆304,转筒连杆304远离支架转筒302的一端设有调节套筒305,调节套筒305内套设有与调节套筒305转动连接的支架调节轴311,支架调节轴311上设有与调节套筒305间隙配合的支架支撑杆306。
31.无人机本体1底端设有分别与支架调节器相配合的调节电动推杆301,调节电动推杆301的活动端通过电动推杆转轴314与转筒连杆304转动连接;调节套筒305上设有套筒调节电机313,套筒调节电机313通过减速齿轮312与设置在支架调节轴311上的支架调节齿轮310相配合;支架支撑杆306底端设有支撑凸起309,支撑凸起309上设有支撑垂轴307,支撑垂轴307上设有与支撑垂轴307活动连接的垂轴支撑脚308;调节电动推杆301、套筒调节电机313均与无人机处理器电性连接;医疗物资输送结构还包括设置在无人机本体1上与支架调节结构3、无人机起落架4间隙配合的物资暂储结构。
32.轨道传输结构包括设置在无人机本体1顶端的隐藏凹槽101,隐藏凹槽101内设有传输调节器,隐藏凹槽101上设有一对相互配合的旋转盖板102,旋转盖板102通过盖板转轴103与无人机本体1相连接,无人机本体1内设有与盖板转轴103相配合的盖板电机;传输调节器包括两个相对隐藏凹槽101中心对称的可伸缩调节杆104,可伸缩调节杆104与设置在隐藏凹槽101中心上的传输电动推杆105间隙配合,传输电动推杆105活动端设有一对间隙配合且与可伸缩调节杆104顶端相连接的传输推杆转轴106、107,传输推杆转轴106、107上设有相互配合的传输挡翅108、109,传输挡翅108、109均通过一对间隙配合的挡翅转筒116与传输推杆转轴106、107转动连接,挡翅转筒116内设有与传输推杆转轴106、107相配合的转筒弹簧。传输调节器还包括与传输挡翅108、109相配合的挡翅调节结构112,挡翅调节结构112包括分别与传输挡翅108、109相配合的限位挡板113、114,限位挡板113、114一端设有与传输推杆转轴106、107转动连接的挡板转筒123,挡板转筒123与挡翅转筒116间隙配合,挡板转筒123端部设有转筒齿轮122、115,转筒齿轮122、115与设置在限位挡板113、114间隙
内的挡翅调节板126相配合。
33.挡翅调节板126的两侧均设有与转筒齿轮122、115相啮合的调节板齿条120,挡翅调节板126上套设有与调节板齿条120间隙配合的齿条防护筒124,齿条防护筒124通过防护筒连杆119分别与设置在传输推杆转轴106、107上的防护筒轴承117相连接;齿条防护筒124上设有挡翅调节电机121,挡翅调节电机121活动端设有与调节板齿条120相配合的挡翅调节齿轮127,挡翅调节齿轮127通过设置在齿条防护筒124上的防护筒调节孔125与调节板齿条120相啮合;传输挡翅108、109底面上均设有挡翅凹槽111,挡翅凹槽111内设有挡翅凹轮110;挡翅调节电机121与无人机处理器电性连接;挡翅调节板126上设有与齿条防护筒124相配合的挡翅凸起。
34.输送轨道机构包括输送凹槽130,输送凹槽130内部两侧均设有与挡翅凹轮110相配合的输送轨道131,输送轨道131上均设有轨道输送器,轨道输送器包括输送壳体132,输送壳体132靠近传输挡翅108、109的一端设有压力传感器,输送壳体132上设有与输送轨道131相配合的输送凹轮135,输送凹轮135通过输送同步带134与设置输送壳体132内的输送同步电机133相配合。
35.输送壳体132上设有调节转轴136,调节转轴136上设有固定连杆137,固定连杆137端部设有弧型固定卡头138,弧型固定卡头138与设置在传输挡翅108、109上的固定卡孔118相配合;输送壳体132内设有与调节转轴136相配合的输送调节电机;压力传感器、输送同步电机133、输送调节电机均与远程处理器电性连接。传输挡翅108、109远离挡翅转筒116的一端设有挡翅转轴129,挡翅转轴129上设有挡翅转环128;输送凹槽130的侧面为弧型侧面;传输挡翅108、109上、输送凹槽130底面上设有相互配合的红外线光电开关;输送凹槽130内设有多个位置传感器;红外线光电开关、位置传感器均与远程处理器相连接。
36.根据上述的高层病房用无人机智能输送系统的方法,步骤包括:第一步、医疗物资输送前的准备;ⅰ、预设程序的选择或输入;通过对智能控制系统远程控制壳体5上的触摸显示屏6进行触摸选择操作,选择医疗物资的输送楼层,选择合适的起飞等待时间,远程处理器通过数据分析处理模块将指令信息传递给远程信号处理模块,远程信号处理模块将指令信息无线传输给无线信号处理模块,无人机数据处理模块对指令信息进行分析,并将分析数据传输给无人机处理器,无人机处理器控制无人机旋翼2启动,从而带动无人机主体从待机区域飞行到输送等待区域内。
[0037]ⅱ、医疗物资输送结构的调整及医疗物资的装载;无人机主体进入输送等待区域后,无人机处理器控制支架调节结构3的一对支架调节器进行同步调整动作,方便进行医疗物资的放置,具体步骤为:无人机处理器控制调节电动推杆301、套筒调节电机313启动,调节电动推杆301的活动端伸展,随着调节电动推杆301的伸展,电动推杆转轴314在转筒连杆304上转动,转筒连杆304带动支架转筒302沿转筒轴承303转动,使得转筒连杆304远离支架转筒302的一端逐渐远离无人机本体1底面,随着调节电动推杆301的继续伸展,转筒连杆304与无人机本体1底面之间的最大夹角为90
°
,调节电动推杆301伸展完成后,转筒连杆304调节完成。
[0038]
随着调节电动推杆301的伸展,套筒调节电机313通过减速齿轮312与支架调节齿轮310啮合,带动支架调节轴311在调节套筒305内转动,使支架支撑杆306与转筒连杆304之
间的夹角增加,使调节套筒305逐渐远离地面,随着上述调节动作的进行,垂轴支撑脚308始终保持与地面的贴合,垂轴支撑脚308上的支撑垂轴307在支撑凸起309上转动,从而使支架调节器始终保持平稳状态,经过一段时间后,一对支架调节器调节完成,此时,无人机起落架4与地面存在间隙,输送人员可以将医疗物资放置在物资暂储结构内,等待无人机本体1起飞或通过手持遥控器控制无人机本体1立即起飞。
[0039]
第二步、医疗物资的飞行输送及无人机本体1与输送轨道131的对接;在无人机处理器的控制下,无人机本体1在无人机旋翼2的带动下沿预设飞行线路起飞,无人机本体1飞行到预设楼层后,通过设置在预设楼层的飞行窗口进入该楼层内,无人机本体1准备与输送凹槽130内的输送轨道131进行连接,具体步骤为,无人机本体1顶端的摄像头对输送凹槽130位置进行摄像扫描,同时配合无人机本体1顶端的激光距离传感器实时检测无人机本体1与输送凹槽130之间的距离,将检测到的数据传输给无人机处理器,无人机数据处理模块配合无人机处理器进行数据分析处理,通过数据分析处理对无人机飞行位置进行调整,使得无人机本体1逐渐接近输送凹槽130。
[0040]
当无人机本体1到达输送凹槽130一定距离内,无人机处理器启动盖板电机,一对盖板电机分别带动盖板转轴103转动,使隐藏凹槽101上的一对旋转盖板102旋转,隐藏凹槽101内的传输调节器露出,而后,无人机处理器控制传输调节器伸出,传输电动推杆105伸展,带动两侧的可伸缩调节杆104伸展,而后,防护筒连杆119上的挡翅调节电机121启动,由于防护筒轴承117的设置,防护筒连杆119处于稳定状态,挡翅调节电机121的挡翅调节齿轮127通过防护筒调节孔125与调节板齿条120相啮合,带动挡翅调节板126向下移动,使挡翅调节板126两侧与挡翅调节齿条啮合的转筒齿轮122、115转动,使挡板转筒123沿传输推杆转轴106、107转动,带动两侧限位挡板113、114的活动端相互靠近,使挡翅调节结构112不再限制传输挡翅108、109,传输挡翅108、109在挡翅转筒116内转筒弹簧的作用下升起,使得一对传输挡翅108、109能够进入输送凹槽130内,齿条防护筒124能够限制挡翅调节板126在一定范围内运动,至此,传输调节器调节完成,无人机处理器通过无线信号处理模块发出数据信号,远程信号处理模块对数据进行收集并传输给远程处理器,远程处理器控制轨道输送器移动到预设位置,方便与无人机本体1进行对接及轨道输送动作。
[0041]
而后,传输挡翅108、109上、输送凹槽130底面上相互配合的红外线光电开关进行位置对正动作,当红外线光电开关发出的信号能够被对应的红外线光电开关接收时,无人机处理器控制无人机本体1与输送凹槽130进行对接动作,无人机处理控制器控制无人机向上飞行,使一对处于竖直状态下的传输挡翅108、109通过输送凹槽130的开口进入输送凹槽130内,无人机处理器控制挡翅调节电机121启动,挡翅调节电机121通过挡翅调节齿轮127与调节板齿条120相啮合,带动挡翅调节板126向上移动,使挡翅调节板126两侧与挡翅调节齿条啮合的转筒齿轮122、115转动,挡板转筒123沿传输推杆转轴106、107转动,带动两侧限位挡板113、114的活动端相互远离,使得传输挡翅108、109沿挡翅转筒116挤压转筒弹簧,经过一段时间运动后,挡翅调节电机121关闭,此时,限位挡板113、114均处于水平状态,传输挡翅108、109底面垂直于输送轨道131,而后无人机处理器控制无人机旋翼2停止转动,传输挡翅108、109落在输送凹槽130两侧的输送轨道131上,此时挡翅凹槽111内的挡翅凹轮110卡在输送轨道131上,由于采用了挡翅调节板126上调节板齿条120的设计,使得限位挡板113、114受到传输挡翅108、109反作用力时,转筒齿轮122、115不能带动调节板齿条120移
动,从而起到防止出现挡翅调节结构112失效的可能;至此,无人机本体1对医疗物资的飞行输送及对接完成。
[0042]
第三步、医疗物资的轨道输送;无人机本体1与输送轨道131对接完成后,远程处理器控制轨道输送器靠近传输挡翅108、109,输送同步电机133启动,输送同步电机133通过输送同步带134带动输送凹轮135运动,使输送壳体132与传输挡翅108、109相接触,当压力传感器检测到压力值时,远程处理器控制输送同步电机133停止,控制输送调节电机转动一定角度,输送调节电机带动调节转轴136转动一定角度,带动固定连杆137旋转一定角度,使弧型固定卡头138卡在固定卡孔118内,从而实现轨道输送器带动无人机本体1运动的目的,挡翅转轴129上的挡翅转环128方便传输挡翅108、109在输送凹槽130内转弯时进行导向作用,从而将无人机本体1上的医疗物资通过输送轨道131输送到指定位置,方便医护人员取用;取用完成后,通过手持遥控器控制轨道输送器返回,轨道输送器返回到初始位置后,按照程序解除无人机本体1与输送轨道131的对接状态,而后,无人机本体1按照预设程序飞回到待机区域内,进行充电等工作,方便再次进行医疗物资的输送动作;当出现异常情况时,远程控制器控制发光报警柱7和声音报警器8发出声光报警动作,提醒操作人员注意。
[0043]
实施例2一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:挡翅凹轮110内均布有挡翅轮齿,挡翅轮齿与均布在输送轨道131上的轨道轮齿相配合。
[0044]
实施例3一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:输送轨道131上均设有一对间隙配合的轨道输送器,轨道输送器分别设置在传输挡翅108、109的两侧与传输挡翅108、109相配合。
[0045]
实施例4一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:输送凹槽130内部两侧均设有与挡翅凹轮110相配合的输送轨道131,其中一个输送轨道131上设有轨道输送器。
[0046]
实施例5一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:输送凹槽130内部两侧均设有与挡翅凹轮110相配合的输送轨道131,其中一个输送轨道131上设有一对间隙配合的轨道输送器,轨道输送器分别设置在传输挡翅108、109的两侧与传输挡翅108、109相配合。
[0047]
实施例6一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:垂轴支撑脚308底面上套设有柔性防滑垫圈,柔性防滑垫圈上设有不规则的防滑凸起。
[0048]
实施例7一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:支架调节结构3包括两个以上相对无人机起落架4轴心所在竖直平面镜面对称的支架调节器。
[0049]
实施例8一种高层病房用无人机智能输送系统,与实施例1的不同之处在于:限位挡板113、
114与传输挡翅108、109固定连接。
[0050]
以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。