1.本发明属于飞行器结构控制领域,具体涉及一种超音速飞行器机头部可变形结构的偏转控制机构的操纵控制方法。
背景技术:
2.超音速飞行器的操纵效率一直以来是一个困扰设计人员的难题。在现有的操纵方式中,控制舵面大多位于飞行器上偏后的位置,随着飞行速度的增加,升力面的结构弹性变形会对舵面效率产生较大的影响。当飞行速度增加到一定值时,由于升力面的结构弹性变形,操纵效率会不断降低,甚至变为零。
技术实现要素:
3.本发明针对现有技术中存在的问题,公开了一种超音速飞行器头部可偏转变形机构的控制方法,本发明针对超音速飞行器头部可变形结构,提供偏转控制机构的操纵控制方法,实现高效、准确、快速的航向机动操纵控制。
4.本发明是这样实现的:
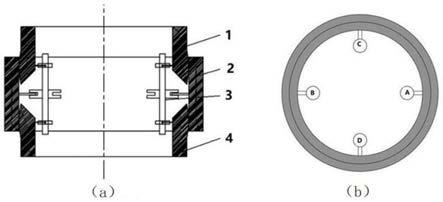
5.一种超音速飞行器头部可偏转变形机构的控制方法,所述的变形机构包括头部连接环(1)以及机身连接环(4),所述的头部连接环(1)以及机身连接环(4)之间通过双球铰连接结构(2)连接,双球铰连接结构(2)上设置四组距离调整装置(3);
6.所述的距离调整装置(3)包括一个带有双向螺杆的驱动控制盘(7)、两个连接支臂(5),所述的两个连接支臂(5)分别与头部连接环(1)以及机身连接环(4)连接,所述的驱动控制盘(7)通过定位板(8)与双球铰连接结构(2)连接;设置双向螺杆(6)固接在驱动控制盘(7)的中心轴线处,双向螺杆(6)用于实现距离调整装置的伸缩操作;驱动控制盘(7)两侧螺杆一侧为左旋螺纹另一侧为右旋螺纹,在驱动控制盘(7)处用伺服电机(10)驱动控制盘,由此完成双向螺杆(6)的双向转动进而改变连接支臂之间的距离;所述的两个连接支臂圆环设置位移传感器(9),用于测量两个连接支臂圆环中心之间的距离。
7.进一步,设定同一个距离调整装置(3)上,与头部连接环(1)与机身连接环(4)对应位置处的连接支臂(5)圆环中心的距离为l;当飞行器头部存在偏转的情况时,位移传感器测得的距离为h,h为伺服电机工作后两个相对应的连接支臂圆环中心的距离;
8.设飞行器的轴线方向与航向相同,向前为正,定义相位向右为0
°
,向左为180
°
;向上为90
°
,向下为270
°
,四个距离调整装置(3)布置在机身连接环(4)和头部连接环(1)的0
°
、90
°
、180
°
、270
°
相位位置处;
9.机身连接环(4)与头部连接环(1)有四个距离调整装置,处于机身连接环(4)或头部连接环(1)上四个连接支臂的圆环中心组成一个正方形,设正方形的对角线长为h;
10.设定相位为0
°
,180
°
,90
°
,270
°
的距离调整装置(3)中与机身相连的连接支臂圆环中心分别为a1,b1,c1,d1;
11.设定相位为0
°
,180
°
,90
°
,270
°
的距离调整装置(3)中与机头相连的连接支臂圆环
中心分别为a2,b2,c2,d2;
12.a1b1和c1d1之间的距离为h;a1a2之间的距离为h1;b1b2之间的距离为h2;c1c2之间的距离为h3;d1d2之间的距离为h4.h1,h2,h3和h4由位移传感器得到;
13.以机体轴线为z轴,0
°
~180
°
相位位置连线,即水平面方向为x轴,90
°
~270
°
相位位置连线,即垂直面方向为y轴建立空间坐标系,机身连接环上的连接支臂圆环a1(h/2,0,0),b1(-h/2,0,0),c1(0,h/2,0),d1(0,-h/2,0),头部连接环上的连接支臂圆环为a2,b2,c2,d2;
14.由于整个偏转控制机构连接环采用的是双球铰结构,故互相对应的两个距离调整装置中两个连接支臂圆环中心的距离之和是固定不变的为2l,也就是h1+h2=h3+h4=2l。
15.进一步,在飞行器飞行过程中,通过位移传感器得到四个距离调整装置中相对的两个连接支臂圆环中心的距离,也就是得知h1,h2,h3,h4的情况下,即得到飞行器的偏转方向及机头与机身轴的夹角;固定机身连接环不动,即a1,b1,c1和d1的位置不变,通过h1,h2,h3和h4,可以确定a2,b2,c2和d2的具体位置。
16.进一步,求取机头连接支臂圆环中心的坐标,在a2中,在已知h1的情况下,可以得到a2(h/2+ε
x
,εy,h1+εz),ε
x
、εy、εz是a2和a1坐标轴上的偏差距离;由于在实际应用中h1《《h,在误差允许范围内,ε
x
=-h/2+(h2/4-(h
1-l)2)
1/2
,εy=εz=0,因此a2((h2/4-(h
1-l)2)
1/2
,0,h1),b2(-(h2/4-(h
2-l)2)
1/2
,0,h2),c2(0,(h2/4-(h
3-l)2)
1/2
,h3),d2(0,-(h2/4-(h
4-l)2)
1/2
,h4);
17.得到头部连接环上的连接支臂圆环a2,b2,c2,d2的坐标,线段a2b2的中点与线段c2d2的中点重合都为o2(0,0,l),说明a2、b2、c2、d2共面,且在同一个圆上,圆心为o2(0,0,l),该圆方程表达式为其法向量为
18.其中nx=(l-h1)*(h2/4-(l-h3)2)
1/2
,;ny=(l-h3)*(h2/4-(l-h1)2)
1/2
;nz=(h2/4-(l-h1)2)
1/2
*(h2/4-(l-h3)2)
1/2
;
19.做一个过机身轴的平面,与a2,b2,c2和d2四点所形成的圆o2相交,将这个平面绕机身轴旋转,当旋转到某个角度时,平面上的两个点e和f在轴的两侧,这两个点处于相同的高度两个点的高度都等于l(以a1,b1,c1和d1所在平面为基准),这个平面表达式为nx
·
x+ny
·
y=0;
20.过圆心做ef的垂线,垂线所在的直线交圆o2两点j和k,j和k的连线段所在的直线方程表达式为
21.即得到机头偏转所在的平面,直线jk和机身轴构成的平面与a1b1和机身轴构成的平面之间的夹角就是飞行器头部产生偏转的相位方向,直线jk和机身轴的夹角的余角就是机头与机身轴的夹角;
22.代入数据,得到飞行器的偏转方向是:
23.当h1》l,arctan(ny/nx)*57.3
°
+180
°
;
24.当h1《l且h3《l,arctan(ny/nx)*57.3
°
;
25.当h1《l且h3》l,arctan(ny/nx)*57.3
°
+360
°
;
26.航向与机身轴的夹角为arccos(nz/(nx2+ny2+nz2)
1/2
)*57.3
°
;
27.飞行器正常向前飞行,头部无偏转,想要偏转进入目标飞行路线的时,即知道所需要偏转的方向为θ,航向与机身轴的夹角为
ɑ
,以此来求四个距离调整装置需要调整的位移量δh1,δh2,δh3和δh4。
28.进一步,过机身轴作一个平面,该平面与0
°
~180
°
平面的旋转角为θ,在这个平面上定两个点,与机身轴的垂直距离为h/2,高度为l+δ,l-δ,δ为计算得到的两者需要偏差的距离,δ=h/2*sin
ɑ
,;再作过机身轴的平面,该平面与0
°
~180
°
平面的旋转角为θ+90
°
,在这个平面上定两个点,与机身轴的垂直距离为h/2,高度为l;过这四个点作圆,这个圆在0
°
,180
°
,90
°
,270
°
相位位置,即在四个距离调整装置处的截距分别为h1'、h2'、h3'和h4',h1'、h2'、h3'和h4'与前一个状态的h1、h2、h3和h4的差就是四个距离调整装置需要调整的位移量;
29.代入数据,可得到四个距离调整装置需要调整的位移量:
30.δh1=-(h*cosθ*sin
ɑ
)/(2*(cos2ɑ
+cos2θ*sin2ɑ
)
1/2
),
31.δh2=(h*cosθ*sin
ɑ
)/(2*(cos2ɑ
+cos2θ*sin2ɑ
)
1/2
),
32.δh3=-(h*sin
ɑ
*sinθ)/(2*(cos2ɑ
+sin2ɑ
*sin2θ)
1/2
),
33.δh4=(h*sin
ɑ
*sinθ)/(2*(cos2ɑ
+sin2ɑ
*sin2θ)
1/2
),
34.驱动伺服电机,带动驱动控制盘,调整连接支臂圆环中心的距离,通过位移传感器测量调整后的距离h1'、h2'、h3'、h4',使机头偏转到需要的偏转方向和偏转角度上,达到目标飞行路线,从而实现航向机动操控。
35.进一步,将偏转控制方法固化成模板并嵌入飞控系统;如果要查看当前飞行器状态,点击按钮,系统自动读取位移传感器测量得到的四个距离值并计算,然后在屏幕显示当前飞行器航向和飞行器头部偏转方向;输入方向指令,系统会分析计算,驱动伺服电机工作,使连接支臂圆环中心的距离达到计算值,使得机头偏转到需要的偏转方向和偏转角度上,偏置力作用,飞行器达到目标航向。
36.本发明与现有技术相比的有益效果在于:
37.本发明是基于不对称的结构会在高速飞行的条件下产生一定的偏置力,针对超音速飞行器,当其头部发生一定的偏转时,会产生偏置力,进而在气流的作用下产生相应的偏置力矩,使飞行器的飞行方向产生相应的变化。本发明利用上述的机理提出一种飞行器头部可偏转变形的结构概念,并提供一种对应的偏转控制机构方案,使得超音速飞行器的操纵效率得到改善。
38.本发明的偏转控制方法固化模块嵌入飞控系统,可以精确控制飞行器头部偏转,从而实现高效率地飞行器航向机动。在飞控系统中,点击按钮,屏幕上就会显示航向和飞行器头部偏转方向;输入方向指令,飞控系统就会简单处理,然后驱动伺服电机工作,自动调整飞行器头部偏转方向,偏置力作用下,整个飞行器就快速、准确实现了航向偏转的操纵。同时,本发明的控制机构方案可以避免后体舵面操纵控制方式产生随飞行速度增加操纵速度效率降低的负面效果。
39.本发明针对超音速飞行器头部可变形结构的偏转控制机构提供了一种行之有效的控制方法。本发明实现航向任意角度上的偏转,可以快速地调整飞行器的飞行方向,且大大改善了超音速飞行器的操纵效率。
附图说明
40.图1是本发明偏转控制机构示意图;1(a)为是偏转控制机构的主视图;1(b)是偏转控制机构的俯视图。
41.图2是本发明距离调整装置示意图
42.图3是本发明中伺服电机与驱动控制盘的传动关系示意图;
43.图4是本发明方法的具体实施例中在数学几何计算过程中坐标系示意。
44.其中,1-头部连接环,2-双球铰连接结构,3-距离调整装置,4-机身连接环,5-连接支臂,6-双向螺杆,7-驱动控制盘,8-定位板,9-位移传感器,10-伺服电机。
具体实施方式
45.为使本发明的目的、技术方案及效果更加清楚,明确,以下列举实例对本发明进一步详细说明。应当指出此处所描述的具体实施仅用以解释本发明,并不用于限定本发明。
46.如图1~3所示,本发明的一种超音速飞行器头部可偏转变形机构包括头部连接环1以及机身连接环4,所述的头部连接环1以及机身连接环4之间通过双球铰连接结构2连接,双球铰连接结构2上设置四组距离调整装置3;所述的距离调整装置3包括一个带有双向螺杆的驱动控制盘7、两个连接支臂5,所述的两个连接支臂5分别与头部连接环1以及机身连接环4连接,所述的驱动控制盘7通过定位板8与双球铰连接结构2连接;设置双向螺杆6固接在驱动控制盘7的中心轴线处,双向螺杆6用于实现距离调整装置的伸缩操作;驱动控制盘7两侧螺杆一侧为左旋螺纹另一侧为右旋螺纹,在驱动控制盘7处用伺服电机10驱动控制盘,由此完成双向螺杆6的双向转动进而改变连接支臂之间的距离;所述的两个连接支臂圆环设置位移传感器9,用于测量两个连接支臂圆环中心之间的距离。
47.以机体轴线为z轴,0
°
—180
°
相位位置连线(水平面)方向为x轴,90
°
—270
°
相位位置连线(垂直面)方向为y轴建立空间坐标系,机身连接环上的连接支臂圆环a1(h/2,0,0),b1(-h/2,0,0),c1(0,h/2,0),d1(0,-h/2,0),头部连接环上的连接支臂圆环为a2,b2,c2,d2。
48.由于整个偏转控制机构连接环采用的是双球铰结构,故互相对应的两个距离调整装置中两个连接支臂圆环中心的距离之和是固定不变的为2l,也就是h1+h2=h3+h4=2l。
49.在已知h1,h2,h3,h4的情况下,求飞行器的偏转平面及与机身轴的夹角。
50.先求取机头连接支臂圆环中心的坐标,以a2为例,在已知h1的情况下,可以得到a2(h/2+ε
x
,εy,h1+εz),由于在实际应用中h1《《h,在误差允许范围内,ε
x
=-h/2+(h2/4-(h
1-l)2)
1/2
,εy=εz=0,因此a2((h2/4-(h
1-l)2)
1/2
,0,h1),b2(-(h2/4-(h
2-l)2)
1/2
,0,h2),c2(0,(h2/4-(h
3-l)2)
1/2
,h3),d2(0,-(h2/4-(h
4-l)2)
1/2
,h4),如图4所示。
51.得到头部连接环上的连接支臂圆环a2,b2,c2,d2的坐标,线段a2b2的中点与线段c2d2的中点重合都为o2(0,0,l),说明a2、b2、c2、d2共面,且在同一个圆上,圆心为o2(0,0,l)。
52.当h=100,l=10,通过位移传感器得到h1=8,h2=12,h3=7.5,h4=12.5时,圆o2的方程表达式为找到平面过z轴且与o2交两点e和f,且两点的坐标大小相等,该平面为99.9x+124.9y=0。在圆所在平面,过e和f的连线段过圆
心做垂线,交圆j和k两点,jk连线段所在的直线方程表达式为计算该线段与a1b1的夹角和与z轴的夹角,可以得到飞行器当前偏转的方向为51.4
°
,航向与机身轴的夹角3.7
°
。
53.飞行器正常向前飞行,头部无偏转,想要偏转进入目标飞行路线的时候,也就是知道所需要偏转的方向为θ,航向与机身轴的夹角为
ɑ
(
ɑ
《arctan(2l/h)),求四个距离调整装置需要调整的位移量δh1,δh2,δh3,δh4。
54.当h=100,l=10,飞行器向前直线飞行,现在接到命令要改变飞行路线,航向偏转的方向为135
°
和航向与机身轴的夹角为5
°
时,通过两个已知的角度确定j和k坐标,由j和k的坐标确定e和f的具体位置,四点共圆,在圆上找到相应的a2,b2,c2和d2,就可以得到δh1=3.0873,δh2=-3.0873,δh3=-3.0873,δh4=3.0873。最后,驱动伺服电机,带动驱动控制盘,调整连接支臂圆环中心的距离,通过位移传感器测量调整后的距离h1'=13.0873、h2'=6.9127、h3'=6.9127、h4'=13.0873,使机头偏转到需要的偏转方向和偏转角度上,达到目标飞行路线,从而实现航向机动操控。
55.本发明固化集成的有益效果在于针对超音速飞行器头部可变形结构的偏转控制机构提供了一种行之有效的控制系统,可以快速地调整飞行器的飞行方向,使其实现航向任意角度偏转。
56.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。