1.本发明属于试飞测试技术领域,具体涉及一种螺旋桨小飞机噪声合格审定测量系统。
背景技术:
2.在中国民用航空局的《航空器型号和适航合格审定噪声规定》(ccar-36部)中规定了螺旋桨小飞机(此处泛指最大起飞重量为8618公斤及其以下的螺旋桨驱动的飞机)的起飞噪声要求,其中第g36.103条和第g36.105条是对测量系统的要求,但未给出具体的测量系统构建方法。
技术实现要素:
3.本发明的目的是:为螺旋桨小飞机噪声合格审定设计一种测量系统,能够完成对飞机噪声信号和空中位置的测量,以验证其与ccar-36部的符合性。
4.技术方案:提供一种螺旋桨小飞机噪声合格审定测量系统,所述测量系统包括机载测量子系统、地面差分gps基站子系统、地面噪声测量子系统和地面航迹测量子系统;其中,
5.所述机载测量子系统,用于记录飞机的飞行状态参数、发动机参数和记录数据采集时的gps时间;
6.所述地面差分gps基站子系统,用于修正机载测量子系统的gps数据,提高标准定位数据的精度;
7.所述地面噪声测量子系统,用于试验时测量飞机噪声信号和和记录数据采集时的gps时间;
8.所述地面航迹测量子系统,用于试验时实测航迹高度和偏航角度。
9.可选地,所述机载测量子系统包括数据采集记录器和第一差分gps;数据采集记录器用于记录飞机的飞行状态参数、发动机参数,第一差分gps记录数据采集时的gps时间,并将gps时间数据发给数据采集记录器。
10.可选地,所述地面差分gps基站子系统包含第二差分gps,用于获取gps修正数据,在数据处理中将其提供给其他gps作为修正参考。
11.可选地,所述地面噪声测量子系统包括支撑件、传声器、声级校准器、声级计和第三差分gps;其中,
12.所述传声器安装于支撑件上,声级校准器用以现场校准传声器;传声器将噪声信号传输至声级计;第三差分gps记录噪声数据采集时的gps时间。
13.可选地,所述支撑件为圆盘;传声器安装于距离圆盘中心四分之三半径d1处,传声器与其在圆盘上投影的连线垂直于飞机飞行轨迹在地面上的投影;传声器薄膜与圆盘平行、距离圆盘表面距离为d2,d2为0.007米。
14.可选地,传声器使用4189型1/2英寸传声器,声级校准器使用4231型声级校准器,
声级计使用2250型声级计。
15.可选地,所述地面航迹测量子系统包含照相机、可旋转三脚架、正方形网格和可伸缩支架;其中,
16.采用可伸缩支架将正方形网格固定在距离地面的固定高度处,使得正方形网格与地面平行;正方形网格用于提供计算参考比例,可伸缩支架用于固定和调整正方形网格高度;
17.采用支撑装置安装照相机,调整照相机高度使得全部正方形网格出现在照相机的照片中;照相机用于拍摄飞机照片。
18.可选地,定义正方形网格边缘与相机镜头垂直方向的夹角为θ;网格平面到地面的垂直距离为h0;正方形网格边长为l0;飞机机翼长度为l;
19.假设在任意比例的照片上量取到的飞机机翼长度为l2,照片上的正方形网格宽度为l3,则飞机的实测航迹高度h为,
[0020][0021]
可选地,第一差分gps、第二差分gps和第三差分gps均使用gps时间,用于机载测量子系统和地面噪声测量子系统之间的时间同步。
[0022]
技术效果:本发明得到的飞机飞行参数和发动机参数可与噪声信号数据实现gps时间同步,便于确定噪声测量时的飞行参数和发动机参数;
[0023]
得到相机拍摄的飞机照片,依据照片上网格宽度计算得到的比例,换算得到飞机的空中位置,包含高度和航向;由地面航迹测量子系统获得的飞机高度和航向的精度要高于机载测量子系统由飞机系统获得飞行参数,更能反映飞机的真实空中位置。
附图说明
[0024]
图1为螺旋桨小飞机噪声合格审定测量系统架构图;
[0025]
图2为地面噪声测量子系统示意图;
[0026]
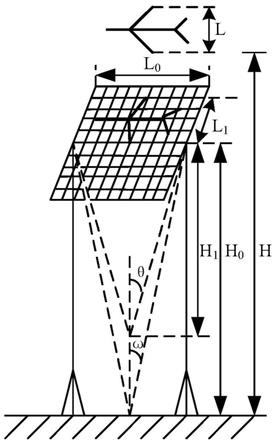
图3为地面航迹测量子系统示意图;
[0027]
图4为噪声合格审定试验示意图;
[0028]
图5为某型飞机噪声合格审定试验实测航迹实拍照片。
具体实施方式
[0029]
为了完成对螺旋桨小飞机噪声合格审定中飞机噪声信号和空中位置的测量,设计一种测量系统,结合图1所示,该系统包含四个子系统,分别为:机载测量子系统、地面差分gps基站子系统、地面噪声测量子系统和地面航迹测量子系统。其中,
[0030]
(1)机载测量子系统
[0031]
本实施例,机载测量子系统包含数据采集记录器和第一差分gps。其中,数据采集记录器使用kam-500数据采集记录器、第一差分gps使用dl-v3差分gps。数据采集记录器用于记录飞机的飞行状态参数、发动机参数;第一差分gps记录数据采集时的gps时间,并将gps时间数据发给数据采集记录器。
[0032]
具体地,飞行状态参数、发动机参数的采集通过机上抽引总线信号的方式,直接由
kam-500采集和记录机上信号,数据与机上信号相同;kam-500安装于机舱内单独设计加装的专用固定式设备架上。
[0033]
第一差分gps包含gps天线和gps接收机两部分,gps天线通过延长电缆延伸安装于飞机驾驶舱挡风玻璃前单独设计加装的专用支架上以加强gps卫星信号搜索能力,gps接收机安装于机舱内单独设计加装的专用固定式设备架上。kam-500和第一差分gps由机上电源供电。
[0034]
(2)地面差分gps基站子系统
[0035]
地面差分gps基站子系统包含第二差分gps。其中,第二差分gps使用dl-v3差分gps,用于提供已知精确的gps三维坐标,以修正飞机位置、提高定位精度。第二差分gps,用于获取gps修正数据,在数据处理中将其提供给其他gps作为修正参考。
[0036]
具体地,地面差分gps基站安装位置周围视野需开阔、无明显建筑物或植物遮挡,以提高差分gps基站的卫星搜索能力。差分gps基站需至少在试验前24小时完成固定和数据试记录,且在试验过程中不可移动,以修正第一差分gps,提高标准定位数据的精度。供电方式视情选择锂电池或220v交流电。
[0037]
(3)地面噪声测量子系统
[0038]
结合图2,地面噪声测量子系统包含涂有白漆的圆盘(直径0.4米、厚度0.0025米)、传声器、声级校准器、声级计、第三差分gps。其中,传声器使用4189型1/2英寸传声器,声级校准器使用4231型声级校准器,声级计使用2250型声级计,第三差分gps使用dl-v3差分gps。地面噪声测量子系统用于试验现场校准噪声测量系统、试验时测量飞机噪声信号和和记录数据时的gps时间。
[0039]
具体地,结合图2所示,涂有白漆的圆盘的安装方式:圆盘直径0.4米、厚度0.0025米,安装于圆盘中心距离飞机起飞滑跑起点2500米处的地面上,水平放置,与周边地面齐平,圆盘下方无空隙。
[0040]
传声器的安装:传声器安装于距离圆盘中心四分之三半径d1处,传声器与其在圆盘上投影的连线垂直于飞机飞行轨迹在地面上的投影,传声器薄膜与圆盘平行、距离圆盘表面距离为d2,0.007米,采用细丝支架方式固定。
[0041]
传声器的现场校准:每次试验的前后,立即使用声级校准器在现场做有记录的声学校准,以检查系统(传声器、声级计)灵敏度和给声级数据分析提供声学基准级。
[0042]
声级计与第三差分gps的安装:传声器使用延长电缆将噪声信号传输至声级计,声级计与传声器有一定的距离以减小对测量结果的干扰。差分gps与声级计的距离要近,电缆要短,以减少电缆过长造成的时间延迟,影响与机载飞行参数和发动机参数的时间同步性。
[0043]
(4)地面航迹测量子系统
[0044]
结合图3,地面航迹测量子系统包含照相机、可旋转三脚架、正方形网格(以不可伸缩细绳均分为100个0.1米乘以0.1米的正方形小格子)、可伸缩支架(调整高度范围2-5米)。其中,照相机用于拍摄飞机照片,正方形网格用于提供计算参考比例,可伸缩支架用于固定和调整正方形网格高度。
[0045]
结合图3所示,地面航迹测量系统的基本构成及安装方式如下所述:
[0046]
正方形网格的安装:正方形网格边长1米,将边长划分为均等的10份,使用不可伸缩的细绳将正方形网格划分为均等的100份。使用可伸缩支架将正方形网格固定在距离地
面的固定高度处,使得正方形网格与地面平行。
[0047]
照相机的安装:使用三脚架安装照相机,调整三脚架使得全部正方形网格出现在照相机的照片中。
[0048]
正方形网格和照相机组合参数:如附图3所示,ω为正方形网格边缘与地面(投影中心)在垂直方向夹角,θ为正方形网格边缘与相机镜头垂直方向夹角(10度),h为飞机实测航迹高度,h0为网格平面到地面的垂直距离,h1为相机镜头到网格平面的垂直距离,l0为正方形网格边长,l为飞机机翼长度,l1为飞机机翼在正方形网格上的实际长度。
[0049]
ccar-36部中对基准航迹和实测航迹误差范围规定为:“航空器必须在相对于测量点处竖直方向
±
10度和基准高度
±
20%的范围之内飞越测量点”。本发明,由以下计算方法可以得到实测航迹的飞机高度和飞机航向(偏航角度),进而与基准航飞机高度和飞机航向(偏航角度)作差求百分比即可得到实际偏差百分比,再与误差范围(
±
10度和
±
20%)作对比判定符合性。
[0050]
飞机高度的计算:如附图3所示,由成像原理和三角函数关系可知:
[0051][0052][0053]
式中,f为相机焦距,l为飞机机翼在相机成像介质(如胶片)上的长度。
[0054]
假设在任意比例的照片上量取到的飞机机翼长度为l2,正方形网格宽度为l3(照片上的网格宽度),则有:
[0055][0056]
l0、l、l2、l3、h0长度和θ角度已知。由式(1)至(3)可得实测航迹高度h的计算公式如下:
[0057][0058]
飞机航向(偏航角度)的计算:调节支架长度使正方形网格边缘刚好位于“竖直方向
±
10度”位置,当飞机出现在正方形网格中时,横向位置即在规定范围内,偏航角度由每偏离1个网格即偏移2度计算得到。
[0059]
本实施例,以某飞机为例,进行飞机噪声合格审定试验;结合图4所示,具体试验过程如下:
[0060]
将地面噪声测量系统和航迹测量系统安装于飞机飞行航迹地面投影上的e点,o点为飞机的起点(松刹车点),两点距离2500米。在该型飞机噪声合格审定试验中,飞机于o点松开刹车,飞机以起飞功率起飞至高于起飞表面10.7米b点,继续以起飞安全速度v2爬升至起落架收起点,继续爬升至高于起飞表面122米点c点,再由v2加速至最佳爬升率速度vy点(同时完成襟翼收起和功率转换),再以最佳爬升率速度爬升至高于起飞表面457米d点。cd之间的某一时刻,经过e点正上方,在此前一定时间提前启动噪声测量,至一定时间后结束,
同时在飞机经过e点正上方时,使用相机进行拍照,要求正方形网格外边缘和飞机整体全部出现在照片中,再通过4中的计算方法,得到飞机的空中位置(高度和航向)。
[0061]
该某型飞机噪声合格审定试验实测航迹高度和偏航角度试算实例:
[0062]
(1)已知:
[0063]
θ为正方形网格边缘与相机镜头垂直方向夹角,试验中为10度;
[0064]
h1为相机镜头到网格平面的垂直距离,试验中为2.9米;
[0065]
h0为网格平面到地面的垂直距离,试验中为3.7米。
[0066]
l0为正方形网格边长,试验中为1米;
[0067]
l为飞机机翼长度,试验中为19.888米。
[0068]
(2)量取:
[0069]
照片中飞机机翼长度为l2,试验中为20毫米;
[0070]
照片中正方形网格宽度为l3,试验中为10毫米。
[0071]
(3)计算:
[0072]
实测航迹飞机高度计算。
[0073]
由图5中照片可知,飞机位于距离正方向网格中心线约1/5小网格处,由“每偏离1个网格即偏移2度”计算得到,偏航角度为0.4度(沿航向向左偏离)。