1.本发明涉及输电线路巡检的技术领域,尤其涉及一种基于无人机的跟头滑车智能收放装置。
背景技术:
2.随着国民经济的不断发展,社会对电力的需求日益增加,对电力企业供电可靠性的要求越来越高,线路停电作业的概率越来越小,同时对线路缺陷及时消缺的要求也越来越高,所以在缺陷消除中带电作业和等电位作业越来越多,滑车是线路带电作业和清除导地线上异物工作中最常用的工具,尤其对输电线路等电位作业有着重要作用。目前,应用的各类滑车的导线挂设仍然为人工操作,费时费力给作业安全带来极大的隐患。电力应用中跟头滑车的收放一般由人员进行放置和撤收,传统的工作方式危险且效率低。
技术实现要素:
3.针对现有跟头滑车收放安全性低且效率低的技术问题,本发明提出一种基于无人机的跟头滑车智能收放装置,利用无人机实现精准地对输电线路的地线处收放跟头滑车,提高了工作效率,提升作业安全性。
4.为了达到上述目的,本发明的技术方案是这样实现的:一种基于无人机的跟头滑车智能收放装置,包括无人机,所述无人机上安装有滑车收放装置,滑车收放装置通过磁性机构与滑车机构相连接,滑车机构与输电线的地线相配合;所述滑车收放装置和磁性机构均plc控制器相连接,plc控制器通过无线与遥控器相连接。
5.进一步地,所述滑车收放装置包括绞盘,绞盘上设有牵引绳,牵引绳的下端设有与磁性机构相匹配的吸盘,绞盘与plc控制器相连接。
6.进一步地,所述磁性机构包括电磁铁i,电磁铁i与吸盘相配合;所述电磁铁i固定在滑车机构的上部,电磁铁i通过供电电路与plc控制器相连接。
7.进一步地,所述滑车机构包括挂线机构和滑车,挂线机构的下部与滑车固定连接,挂线机构的上部与磁性机构的电磁铁i固定连接;所述挂线机构的一侧设有供地线穿过的开口,开口与椭圆形的限位孔相匹配。
8.进一步地,所述开口处设有定位板,定位板的上部与挂线机构的上部相连接,定位板的下部固定有倾斜板,倾斜板位于限位孔的下方。
9.进一步地,所述挂线机构内设有电磁铁ii,电磁铁ii与供电电路相连接;所述电磁铁ii设置在限位孔的下方,电磁铁ii与定位板的下部相匹配。
10.进一步地,所述限位孔的上部固定有转轴,转轴上活动设有与地线相匹配的滑轮i。
11.进一步地,所述滑车包括倒u型支架,倒u型支架内活动设有滑轮ii,滑轮ii上设有挂绳。
12.进一步地,所述供电电路对电磁铁i或电磁铁ii提供供电电流,实现异步控制。
13.进一步地,所述遥控器上设有无线发射模块,无线发射模块与无线接收模块相连接,无线接收模块与plc控制器相连接。
14.与现有技术相比,本发明的有益效果:在无人机上搭载滑车收放装置,滑车上挂载牵引绳,无人机通过电磁铁i将整个滑车装置吸起,挂载在地线上以后释放电磁铁;滑车作业完毕后无人机起飞,将地线上的滑车机构吸取回收。本发明的专用滑车能一次安装到位,避免了重复作业,减少了软梯、绝缘绳等工具的使用次数,从而可以降低工具的更换频率;节约了跟头滑车的悬挂时间、提高了工作效率;在符合安全规范的工况下,无需作业人员攀登杆塔实现滑车的精准投放;节省人力物力,对工作环境没有特殊要求,可有效减少作业人员高空作业,及时消除人员安全隐患,提高工作效率。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
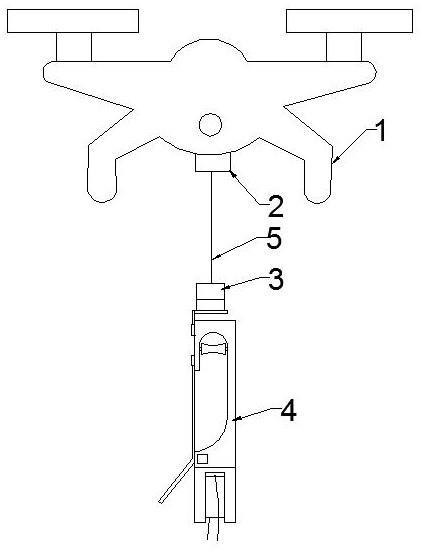
16.图1为本发明的结构示意图。
17.图2为图1所示中滑车机构的结构示意图。
18.图3为本发明的控制原理图。
19.图中,1为无人机,2为绞盘,3为吸盘,4位滑车机构,5为牵引绳,41为挂线机构,42为滑车,43为电磁铁i,44为电磁铁ii,45为滑轮i,46为固定支架,47为定位板,48为滑轮ii,49为挂绳。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图1和图3所示,一种基于无人机的跟头滑车智能收放装置,包括无人机1,无人机用于搭载滑车收放装置,从而将滑车机构运送至相应的输电线的地线上。所述无人机1上安装有滑车收放装置,滑车收放装置用于吊装滑车机构,滑车收放装置通过磁性机构与滑车机构4相连接,通过磁性机构可以实现滑车机构的挂载和释放。滑车机构与输电线的地线相配合,滑车机构设置在地线上,从而方便后续的异物清除。所述滑车收放装置和磁性机构均plc控制器相连接,plc控制器通过无线与遥控器相连接,plc控制器通过遥控器进行控制,从而控制磁性机构是否通电,实现滑车机构与滑车收放装置的吸合和断开。无人机通过磁性机构将整个滑车收放装置吸起,挂载在地线上以后释放电磁铁;滑车机构作业完毕后无人机起飞,将地线上的滑车机构通过磁性吸取回收。无人机采用大疆经纬 m600系列飞行平台作为飞行平台,拥有出色的动力性能和电磁抗干扰能力,在跟头滑车的放置与撤收工作中能充分保证飞行安全。无人机拥有厘米级定位悬停功能,并可以进行航向角智能解算,
使无人机在强干扰环境下不受干扰,安全飞行,让无人机在在跟头滑车的放置与撤收工作中对工作安全和效率起到至关重要的作用。
22.优选地,所述滑车收放装置包括绞盘2,绞盘2上设有牵引绳5,牵引绳5的下端设有与磁性机构相匹配的吸盘3,绞盘与plc控制器相连接。绞盘2为小型绞盘,绞盘的一端固定在无人机1的下部,绞盘可以实现牵引绳5的收放操作。所述绞盘通过减速箱与直流电机相连接,直流电机与plc控制器相连接,通过plc控制器控制绞盘的收放线。所述减速箱为高强度钢齿减速箱,整个绞盘起重最大重量为15kg。对绞盘和电磁机构的控制采用独立的控制系统,遥控器与无人机的遥控相分离,对无人机的改进较少;独立的链路系统来控制,增加一组遥控器和接收机来实现系统控制,一通道控制绞盘的收放线,一通道控制电磁铁i和电磁铁ii的通断电,保证了绞盘和磁性机构工作的稳定性。
23.优选地,所述磁性机构包括电磁铁i43,电磁铁i43与吸盘3相配合,吸盘3为铁制品,可以在电磁铁通电带有磁性时实现与吸盘3的吸合,反之则吸盘与电磁铁i分离;所述电磁铁i43固定在滑车机构的上部,电磁铁i43通过供电电路与plc控制器相连接。电磁铁i固定在固定支架46的上部,固定支架的下部与滑车机构的上部固定连接,保证了电磁铁与滑车机构连接的稳定性。电磁铁i43采用直流吸盘式电磁铁,体积小,吸力大,有功耗低,升温低,具有断电无剩磁的优点。直流吸盘式电磁铁采用国标紫铜线圈具有良好的绝缘性和导电性,130g的自身重量,7w的功率,吸力达20kg,满足滑车机构的需要。plc控制器通过供电电路可以控制是否向电磁铁i43供电,当电磁铁i43带电时,电磁铁i带电可以吸合吸盘,反之电磁铁i与吸盘分离,从而实现滑车机构与滑车收放装置的分离和吸合。
24.优选地,所述滑车机构包括挂线机构41和滑车42,挂线机构41的下部与滑车42固定连接,挂线机构41的上部与磁性机构的电磁铁i43固定连接;所述挂线机构41的一侧设有供地线穿过的开口,开口与椭圆形的限位孔相匹配。挂线机构41通过电磁铁i43实现与吸盘的吸合和分离。滑车42用于设置挂绳,从而处理地线下方的输电线上的异物。限位孔采用椭圆形设计,上开口口径大,小开口口径小,依据专用滑车连接处的口径设计,方便地线由于重力作用进入,同时,限位孔下部的弧形结构也方便地线由于上部的拉伸而从开口的底部伸出,从而解除与地线的连接;且限位孔结构可以使挂线机构41镂空设计,减小了空中风的阻力,增加了使用过程中的稳定性。
25.优选地,所述开口处设有定位板47,定位板47的上部与挂线机构41的上部相连接,定位板47的下部固定有倾斜板,倾斜板位于限位孔的下方。定位板47一方面可以对开口进行封闭,保证跟头滑车工作时的稳定性,同时倾斜板的设置可以在与地线连接时,将地线限位在倾斜板与滑车42之间,提高了操作的可靠性。
26.优选地,所述挂线机构41内设有电磁铁ii44,电磁铁ii44与供电电路相连接;所述电磁铁ii44设置在限位孔的下方,电磁铁ii44与定位板47的下部相匹配,定位板由铁片构成,电磁铁ii通电时可以实现对定位板的吸附,从而实现滑车工作时,对地线的限位。
27.进一步地,所述限位孔的上部固定有转轴,转轴上活动设有与地线相匹配的滑轮i45。滑轮与地线之间是滑动摩擦,从而避免了使用中对地线表皮的损坏。
28.进一步地,所述滑车42包括倒u型支架,倒u型支架内活动设有滑轮ii48,滑轮ii48上设有挂绳49,通过挂绳49与滑轮ii的滑动,可以处理输电线上的异物。滑车42采用精钢打造,强度高,合理的设计,使用更为简便。
29.所述供电电路对电磁铁i43或电磁铁ii44提供供电电流,实现异步控制。供电电路一端与蓄电池相连接,供电电路另一端与控制开关相连接,控制开关与plc控制器相连接,控制开关设有两个支路,两个支路分别与电磁铁i43和电磁铁ii44相连接,即通过plc控制器调节控制开关,从而调节电磁铁i43或电磁铁ii44通电,当无人机运送滑车机构时,电磁铁i43通电带有磁性时,实现与吸盘的吸合;当将滑车机构运送至地线处,地线通过倾斜板进入限位孔,此时plc控制器通过调节控制开关,将供电电路向电磁铁ii44供电,电磁铁ii44对定位板进行吸附,从而实现将地线稳定地限位在限位孔中,保证了跟头滑车工作的可靠性;当跟头滑车工作完毕,无人机悬停到滑车的正上方时,调节控制开关向电磁铁i供电使其带有磁性,实现与吸盘的吸合,此时定位板与电磁铁ii44分离,拉动吸盘,可以将地线从限位孔中拉出。
30.进一步地,所述遥控器上设有无线发射模块,无线发射模块与无线接收模块相连接,无线接收模块与plc控制器相连接。遥控器由操作人员控制发送指令通过无线发射模块到无线接收模块,无线接收模块接收到指令后控制绞盘的直流电机或电磁铁的控制开关,以此来控制绞盘的收放线和电磁铁的通断电。无线发射模块与无线接收模块可以采用蓝牙、4g通讯或5g通讯技术实现。
31.无人机搭载小型绞盘,绞盘末端挂载吸盘,使用遥控器控制电磁铁的吸合,滑车机构顶端的电磁铁i实现与吸盘的吸合,滑车机构上挂载蚕丝绝缘的牵引绳,使用时,将滑车机构吸合在吸盘上,绞盘收线,绞盘的作用是使滑车和无人机之间的距离可调。在飞行过程中,用绞盘将滑车机构收紧在无人机机腹,以保证无人机在飞行过程中的平稳性,在到达指定作业位置后,将无人机悬停在作业导线上方1-2m ,控制绞盘将滑车机构放至作业导线上,关闭的供电电路使电磁铁i失去磁性,绞盘回收,无人机返航。滑车使用过程中供电电路使电磁铁ii带电,从而实现与定位板的吸附,保证挂线机构与地线连接的稳定性。滑车作业完毕后,无人机起飞至滑车位置,绞盘将吸盘放下,吸合滑车顶端的电磁铁i,将滑车回收。
32.本发明实现了在符合安全规范的工况下,无需作业人员攀登杆塔,滑轮ii在输电线路地线上的精准投放和收取;使用电磁控制的方式精准投放;无人机的参与,减少了人工攀爬杆塔的工作量,提高了线路检修时投放收取滑轮的工作效率,具备在电力系统大量使用和推广应用的价值;节省人力物力,对工作环境没有特殊要求可有效减少作业人员高空作业,及时消除人员安全隐患,提高工作效率。
33.本发明采用分体式设计,满足电力存量不同型号无人机使用,扩大了使用范围;采用电磁遥控设计,减少了其他悬挂操作的便利性;滑车收放装置分体设计、满足重量轻便携带方便的目的;滑车机构满足了高空精准辨识、定位、投放、吸附、收取滑车的目的,操作简单,减少了重复性劳动,提高了安装滑车效率。
34.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。