1.本发明涉及一种飞行器,特别是基于静电驱动的旋翼系统。
背景技术:
2.目前微型飞行器的主要动力装置是螺旋桨动力装置,利用微型电磁电机带动螺旋桨旋转从而产生升力或推力。电磁电机有着转速高、功率大的优点,因此广泛运用于旋翼飞行器。
3.现有微型飞行器动力装置利用传统微型电机驱动螺旋桨旋转,当螺旋桨负载变大时,微型电机内部会因电流大增而大量发热,导致能量转化效率大幅降低,功率密度无法提高,甚至发生过热烧毁,而且在进一步微型化的过程中,随着尺寸的减小,电磁电机的输出特性明显下降,能量密度变低,转速变高,扭矩减小,需要配套的减速增扭装置,这使得结构更为复杂,可靠性降低,安全性变差。以faulhaber(福尔哈贝)公司制作的几款微型电磁电机为例(如表1所示),电磁电机的尺寸越小,扭矩衰减很快,电机的最大效率也越低,所以为了满足更小的超微型飞行器且要满足长航时的飞行,电磁电机已经不是一个很好地选择。
4.产品型号尺寸大小(mm)最大效率%堵转扭矩mnm0308h003b3200.0260515g006b5390.40620k006b6500.730824k006b8703.34
5.表1不同尺寸下的电磁电机参数对比
技术实现要素:
6.本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
7.为了实现上述目的,本发明的技术方案提供了一种基于静电驱动的旋翼动力系统,其特征在于,包括:
8.静子部件,其包括与高压直流电源连接的正电极和负电极,正电极和负电极之间形成静电场;
9.转子部件,其位于静子部件内,转子部件包括旋翼组件及导电片;
10.其中,转子部件的导电片能够从静子部件的正电极或负电极的获取电荷,从而转子部件被静子部件旋转驱动;正电极和负电极均为多个,且在静子部件周向上交叉分布。
11.本发明创新性的提供了静电驱动旋翼飞行器,为旋翼飞行器的动力系统提供了另一种可能,尤其是在微旋翼飞行器领域,静电驱动方式相比于电磁驱动方式有很多良好的性能,如易于微型化、噪音小、能量转换效率高、功率密度高的优势,并且已经实现动力系统推重比大于1,实现了采用静电驱动旋翼的第一次沿导轨带线飞行。
12.优选的是,静子部件还包括:
13.上支撑框,其包括上圆环及连接到上圆环的上导线杆;
14.下支撑框,其包括下圆环及连接到下圆环的下导线杆;
15.其中,上支撑框与下支撑框通过沿周向上布置的多个竖直梁连接,竖直梁作为正电极和负电极在周向上交叉分布在上圆环与下圆环之间,正电极通过上导线杆与高压直流电源正极电连接,负电极通过下导线杆与高压直流电源负极电连接。
16.优选的是,静子部件还包括:
17.每个正电极都对应连接一个上导线杆,上导线杆放射状布置在上圆环内,且所有的上导线杆电连接在一起,由一个正电极通过正极连线与高压直流电源正极电连接;
18.每个负电极都对应连接一个下导线杆,下导线杆放射状布置在下圆环内,且所有的下导线杆电连接在一起,由一个负电极通过负极连线与高压直流电源负极电连接。
19.优选的是,静子部件还包括:
20.正极连线与负极连线分别连接在相邻的正电极和负电极上。
21.优选的是,转子部件还包括:
22.框架组件,其能够转动并至少部分位于静子部件内;
23.导电片,所述导电片为多个且分布在框架组件周向外侧,并能够经过正电极和负电极的电晕区;
24.旋翼组件,其与框架组件固定相连。
25.优选的是,框架组件还包括:
26.外框,其包括环形的第一外框架和环形的第二外框架,导电片位于第一外框架和第二外框架之间;
27.内框,其包括环形的第一内框架和环形的第二内框架;
28.连杆,所述连杆连接外框和内框;
29.旋翼组件,其被固定在外框和内框之间。
30.优选的是,还包括:
31.电刷,所述电刷位于正电极,负电极和/或导电片上,并能够将电极与导电片软连接。
32.优选的是,电刷还包括:
33.电刷为银丝并位于电极上,其悬臂端径向向内与导电片接触。
34.另外,本发明还提出一种电机。
35.一种静电驱动的电机,包括:
36.静子部件,其包括与高压直流电源连接的正电极和负电极,正电极和负电极之间形成静电场;
37.转子部件,其位于静子部件内,转子部件包括旋翼组件及导电片;
38.其中,转子部件的导电片能够从静子部件的正电极或负电极的获取电荷,从而转子部件被静子部件旋转驱动;正电极和负电极均为多个,且在静子部件周向上交叉分布。
39.有益效果:
40.1)本发明创新性的提供了静电驱动旋翼飞行器,静电驱动方式相比于电磁驱动方式有很多良好的性能,而且静电电机结构简单,静电电机在mems领域运用广泛,之后的进一步研发前景非常广阔,其易于微加工,电流小(微安级别)、效率高,几乎不会发热,然而电磁电机在微小尺寸下效率很低发热严重。
41.2)本发明通过对静电电机构型的创新,使静电电机能够输出更大的扭矩,采用侧驱式的静电驱动方式,该方式可以获得更大的扭矩,即静电驱动的力臂大,同时正负电极之间可以获得较大间距,从而可以在正负极之间加更大的电压,产生更大的静电力。而且,导电片在竖直方向上的长度可以继续增加,从而获得更大的静电驱动扭矩,因此在本发明的基础上有很大的优化空间。
42.3)在电刷的设置上,在电极上伸出一根银丝作为电刷,实现了转子和静子电极之间的一个软接触,从而能够把转静子之间的间隙减小为0。电刷的设置会产生一定的阻力,但是获得了更大的静电驱动扭矩,静电驱动力大幅提高。
43.4)接线方式,本发明的接线方式巧妙利用结构本身的,把所有电极串成一个整体(正极或负极),上导线杆、下导线杆既是框架结构,也是导电结构,从而简化了布线结构,减轻了整机的重量。
44.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
45.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
46.图1示出了根据本发明的一个实施例的基于静电驱动的旋翼动力系统结构原理示意图;
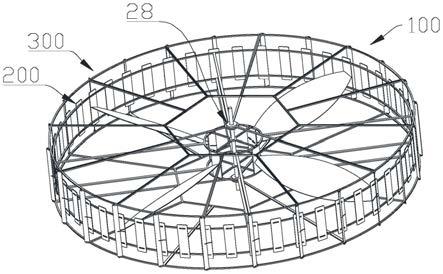
47.图2示出了根据本发明的一个实施例的基于静电驱动的旋翼动力系统结构立体示意图;
48.图3示出了根据本发明的一个实施例的转子部件结构立体示意图;
49.图4示出了根据本发明的一个实施例的静子部件结构立体示意图;
50.图5示出了图4的静子部件结构立体示意图中的a区域放大图;
51.图6示出了mems静电电机(微米级别)结构示意图;
52.图7示出了现有技术中静电电机原理图;
53.图8示出了现有技术中静电电机实物图;
54.图9示出了根据本发明的一个实施例制作的一个实物。
55.其中,图1至图9图中标记与结构的对应关系如下:
56.旋翼动力系统100,转子部件200,第一外框架21,第二外框架22,连杆23,第一内框架24,第二内框架25,风扇叶片26,导电片27,轴承组件28,静子部件300,上支撑框31,下支撑框32,上导线杆33,下导线杆34,正电极35,负电极36,正极连线37,负极连线38,电刷39,mems静电电机400,转子电极401,轴承402,定子电极403。
具体实施方式
57.为了可以更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
58.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可
以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
59.下面参照图1至图5描述根据本发明的一些实施例。
60.实施例1:
61.本发明基于静电电机驱动,静电电机工作原理其工作原理如图1所示,当对正、负电极分别施加直流高电压后,正负电极之间形成静电场,并且在正负极附近会形成电晕区(电极附近电场强大很大,可以将附近的空气电离形成电晕区,从而使电极附近的空气带有与电极的极板相同的电荷);当转子部件上的导电片(可以在电场中携带电荷)经过正极(或者负极)时,导电片会带上与极板相同的电荷,于是导电片与电极(正极)之间会产生排斥力,推动转子部件运动,同时携带电荷的转子会在电场的作用下奔赴下一级(负极),导电片上的电荷先被中和再被导入与负极相同的电荷,于是导电片与电极(负极)之间会产生排斥力,推动转子部件运动,如此循环往复形成了一个连续的推动力。
62.因此,基于图1的原理,本实施例首先提出一种静电电机。
63.一种静电驱动的电机,包括:
64.静子部件,其包括与高压直流电源连接的正电极和负电极,正电极和负电极之间形成静电场;
65.转子部件,其位于静子部件内,转子部件包括旋翼组件及导电片;
66.其中,转子部件的导电片能够从静子部件的正电极或负电极的获取电荷,从而转子部件被静子部件旋转驱动;正电极和负电极均为多个,且在静子部件周向上交叉分布。
67.图2示出了根据本发明的一个实施例的基于静电驱动的旋翼动力系统100的立体图,包括:
68.静子部件300,其包括与高压直流电源连接的正电极35和负电极36,正电极35和负电极36之间形成静电场;
69.转子部件200,其位于静子部件300内,转子部件200包括旋翼组件及导电片27;
70.其中,转子部件200的导电片27能够从静子部件300的正电极35或负电极36的获取电荷,从而转子部件200被静子部件300旋转驱动;正电极35和负电极36均为多个,且在静子部件300周向上交叉分布。
71.在有益效果上,静电电机电流小(微安级别)、效率高,几乎不会发热,然而电磁电机在微小尺寸下效率很低发热严重。图2中的基于静电驱动的旋翼动力系统已经经过验证并制成了成品,如图9所示,图9中的基于静电驱动的旋翼动力系统正处于悬浮状态(由于采用银丝作为正负电极供电,银丝过于细微在图9中未示出),本专利的基于静电驱动的旋翼动力系统,采用静电驱动具有易于微型化、噪音小、能量转换效率高、功率密度高的优势,并且已经实现动力系统推重比大于1,试验中,实现了采用静电驱动旋翼的第一次沿导轨带线飞行,为旋翼飞行器的动力系统提供了另一种可能。尤其是在微旋翼飞行器领域,静电驱动方式相比于电磁驱动方式有很多良好的性能。在今后的科研中,可以进一步引入mems静电电机,其结构简单,易于微加工,应用前景将进一步扩大。
72.本发明基于的核心原理是通过静电电机驱动风扇叶片产生升力,在优化静电驱动力和减重优化之后,使升重比大于1,实现整机沿导轨带线起飞。理论上静电电机驱动的构型可以有多重,在完成构型优化和减重优化后,在理论上都能实现静电驱动旋翼的起飞,而
不一定需要本发明实施例中的构型。
73.实施例2:
74.除了上述实施例中的技术特征,参见图3,本实施例中静子部件300还包括:
75.上支撑框31,其包括上圆环及连接到上圆环的上导线杆33,正电极35通过上导线杆33与高压电源正极电连接;
76.下支撑框32,其包括下圆环及连接到下圆环的下导线杆34,负电极36通过下导线杆34与高压电源负极电连接;
77.其中,上支撑框31与下支撑框32通过沿周向上布置的多个竖直梁连接,正电极35和负电极36在周向上间隔分布在上圆环与下圆环之间。
78.需要说明的是,上圆环和下圆环是绝缘的,相邻的正电极和负电极不会因为固定在上圆环和下圆环上从而发生电荷的转移。
79.图1中,导电片的作用是携带电荷从而在电极之间受迫运动,从而使转子部件获得扭矩;在图3中可知,可选的一种转子部件的旋翼组件可以包括多个风扇叶片,风扇叶片26作为提供升力的部件,放置在静电电机里面可以使结构利用率提高,同时固定导电片的环形框架加强了整个转子的结构强度,风扇叶片可以做的很薄但不会在运动过程中产生大的形变。上、下撑框架是静子部件300的一部分部分,支撑上下框架的竖直梁8可以作为正负电极使用,也可以另设正负电极,n对电极正负交替排布或者间隔布置。
80.在接线方式上,如图3所示,以正极接线为例,在上支撑框31表面埋入导线把正电极连成一体,相同的,在下支撑框32上的负电极也通过导线连接在一起,这样就能将2n个电极连成一个正极接线口和一个负极接线口,然后在相邻的电极引出两根导线,接入高压直流电源,这样解决了接线问题。
81.以图4接线方式为例,本实施例有12对电极,因为输入的是几千伏的高压,且导线只能是裸露的,所以不能通过跨电极(正电极之间夹着负极)将12个电极(正极或负极)串在一起,传统方式一般采用从外围单独对每一个电极供电或者把线绝缘跨电极连接(如图6所示)。本发明的接线方式巧妙利用结构本身的,用内部的上导线杆33,下导线杆34分别把所有电极串成一个整体的正极或负极,同时上导线杆33,下导线杆34又是框架的承力结构。
82.实施例3:
83.除了上述实施例中的技术特征,参见图3,本实施例中转子部件200还包括:
84.框架组件,其能够转动并至少部分位于静子部件300内;
85.导电片27,所述导电片27为多个且分布在框架组件周向外侧,并能够经过正电极35和负电极36的电晕区;
86.旋翼组件,其与框架组件固定相连。
87.本实施例中通过对静电电机(静电驱动部分,不包含风扇叶片)构型的创新,使静电电机能够输出更大的扭矩。如图2-图5所示,采用侧驱式的静电驱动方式,该方式可以获得更大的扭矩(静电驱动的力臂大),同时正负电极之间可以获得较大间距,从而可以在正负极之间加更大的电压,产生更大的静电力。传统的静电电机转子部分大多采用的是不导电的绝缘体或者半导体(如图7、8所示),而本发明的转子部件采用了导电片,导电片能够携带更多的电荷,导电片使用的材质可以是碳纤维,碳纤维可以导电同时强度非常高,这样导电片可以做的很轻。导电片在竖直方向上的长度可以继续增加,从而获得更大的静电驱动
扭矩,因此在本发明的基础上有很大的优化空间。
88.实施例4:
89.除了上述实施例中的技术特征,本实施例中框架组件还包括:
90.外框,其包括环形的第一外框架21和环形的第二外框架22,导电片27位于第一外框架21和第二外框架22之间;
91.内框,其包括环形的第一内框架24和环形的第二内框架25;
92.连杆23,所述连杆23连接外框和内框;
93.旋翼组件,其被固定在外框和内框之间。
94.电刷39,所述电刷39位于正电极35,负电极36和/或导电片27上,其能够电导通电极与导电片。
95.本实施例中,静电电机的静电驱动力的大小也取决于转子和静子之间的间隙,间隙越小,转子越靠近电极(越靠近电极,电晕场越强)从而能够获得越多的电荷。本发明由于加工装配的都存在比较大的误差,为了避免碰磨,间隙在0.6-1mm之间,这样就无法获得大的驱动扭矩。以图2中的整机为例,其重量为960mg,半径为50mm,高度为14mm。同时,为了获得更大的静电驱动扭矩,必须减小转子部件和静子部件之间的间隙,但是由于加工和装配的精度问题,无法将间隙做的很小,通过在电极上往径向斜伸入一根银丝电刷39,实现转子和电极的软接触,做到了转子导电片和电极的间隙为0,虽然采用了电刷会增加转子的阻力,但是静电力的提高大于阻力的增加,获得了更大的静电驱动扭矩。通过电刷的设置,静电驱动力大幅提高,从而实现了起飞,这是本发明的关键。
96.在本发明中,术语“第一”、“第二”、“第三”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
97.本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“空间水平”和“空间纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明的限制。
98.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
99.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。