1.本发明涉及深空探测技术领域,具体涉及一种用于小行星采样探测的变刚度展开机构。
背景技术:
2.小行星是太阳系形成后的物质残余,也是人类了解太阳系起源、形成和演变的重要载体,对小行星进行采样探测具有十分重要的科学意义。
3.受小行星弱引力、自转周期短、表面地形复杂多变、星表介质特性未知等条件的限制,目前对小行星的采样探测均以“一触即走”的方式开展,即探测器并不着陆小行星,而是通过展开的采样探测设备短时触碰星表,采样完成后即飞离。因此,展开机构除将采样探测设备展开到位之外还需具备一定的触碰缓冲能力,考虑到星表介质特性差异较大,展开机构刚度需与星表介质力学特性匹配方能获得理想的触碰时间及接触效果。
4.日本隼鸟二号采用的弹簧展开机构通过弹簧压缩变形吸收触碰时的残余动能,但其刚度与展开长度不可调,对不同地形适应能力较弱,难以保证有效接触时间。美国欧西里斯探测器采用机械臂搭载展开方式,通过关节力控获得所需的接触刚度,但机械臂机构组成复杂,且控制难度较大。
技术实现要素:
5.有鉴于此,本发明提供了一种用于小行星采样探测的变刚度展开机构,采用笼状弹簧作为展开驱动结构,通过力传感器对前端接触力进行实时测量,并通过卷绳器调节钢丝绳的张紧力,实现展开机构变刚度控制,保证前端采样/探测设备在与不同特性星表接触工作的过程中,均能获得理想的接触压力,具有重量轻、展收比大、适应性强、控制简单等特点。
6.本发明的技术方案为:一种用于小行星采样探测的变刚度展开机构,包括:笼状弹簧a、笼状弹簧b、卷绳器、力传感器、基座和载荷安装板;
7.所述笼状弹簧a的一端与笼状弹簧b的一端通过隔环同轴串联,且二者旋向相反;笼状弹簧a的另一端与基座的前端连接,基座的后端安装在探测器上;笼状弹簧b的另一端与载荷安装板的后端连接,载荷安装板的前端安装有采样/探测设备;力传感器安装于载荷安装板与采样/探测设备之间,用于实时测量采样/探测设备工作时的反作用力;卷绳器安装在基座上,用于驱动连接在卷绳器与载荷安装板之间的钢丝绳收卷或释放,以带动载荷安装板相对基座收卷或释放。
8.优选地,所述卷绳器还包括:卷绳电机、电机支架、角接触球轴承、绞盘和定滑轮;
9.所述绞盘通过一对角接触球轴承安装于基座上,卷绳电机通过电机支架支撑在基座上,并通过一级直齿轮减速驱动绞盘转动;绞盘的回转轴线与笼状弹簧a及笼状弹簧b的轴线同轴,两根以上钢丝绳的根部固定于绞盘上,每根钢丝绳出线位置一侧设有定滑轮,且每个定滑轮安装于基座上,钢丝绳通过对应的定滑轮由水平缠绕取向转为垂直拉伸取向,
每根钢丝绳的活动端连接到载荷安装板上的固定点位置处,载荷安装板上固定点位置与卷绳器出线点位置一一对应,使钢丝绳张紧后处于铅直状态,绞盘转动实现两根以上钢丝绳的同步收卷或释放,展收过程中,载荷安装板与基座平行。
10.优选地,所述卷绳器还包括:小齿轮和大齿轮;所述小齿轮安装于卷绳电机输出端,大齿轮与绞盘固定连接,且小齿轮与大齿轮啮合,组成一级直齿轮。
11.优选地,所述卷绳器与载荷安装板之间安装有三根钢丝绳。
12.优选地,三根所述钢丝绳沿绞盘的周向均匀分布。
13.优选地,所述笼状弹簧b与笼状弹簧a结构相同、旋向相反;笼状弹簧a由左旋弹簧钢丝、弹簧钢丝端子、销轴a、销轴b、前端支撑圆环、后端支撑圆环和中间支撑圆环组成;
14.所述前端支撑圆环圆周面上沿周向均布三处以上相同尺寸的销孔,每个销孔中销接有一个销轴a,三根以上左旋弹簧钢丝的一端分别通过弹簧钢丝端子转动连接在销轴a上;其中,每根左旋弹簧钢丝两端分别通过紧定螺钉设有弹簧钢丝端子,每个弹簧钢丝端子上开有销孔;
15.所述后端支撑圆环与三根以上左旋弹簧钢丝的另一端转动连接;
16.所述中间支撑圆环上沿周向均匀转动连接有三个以上销轴b,每个销轴b沿径向开有通孔,对应的左旋弹簧钢丝从该通孔中穿过;笼状弹簧a压缩或伸长过程中,销轴a和销轴b在前端支撑圆环、后端支撑圆环及中间支撑圆环上转动,以适应左旋弹簧钢丝螺旋升角的变化。
17.优选地,所述前端支撑圆环和后端支撑圆环之间设有十二根左旋弹簧钢丝。
18.有益效果:
19.1、本发明采用笼状弹簧作为展开驱动结构,通过力传感器对前端接触力进行实时测量,并通过卷绳器调节钢丝绳的张紧力,实现了展收、缓冲、力控功能一体化设计,保证前端采样/探测设备在与不同特性星表接触工作的过程中,均能获得理想的接触压力,结构紧凑、控制简单、鲁棒性强;同时,具有重量轻、展收比大、适应性强、控制简单等特点。
20.2、本发明中卷绳器的具体设计,既能够实现其自身与载荷安装板之间通过钢丝绳的可靠连接,又能够准确控制钢丝绳的收放量及收放速度,从而准确控制机构展开行程及展开速度。
21.3、本发明中两个笼状弹簧的具体设计,既能够保证其上螺旋弹簧钢丝的高效伸缩调节,又能够有效提高机构的展收比;同时,配合钢丝绳的张紧力调节,改变展开机构的刚度,通过力传感器控制采样/探测设备的接触力满足工作要求,有效提高了该变刚度展开机构对不同地形、不同特性星表的适应能力。
附图说明
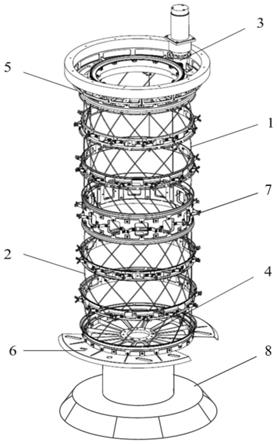
22.图1为本发明的整体结构示意图。
23.图2为本发明中笼状弹簧a的结构示意图。
24.图3为本发明中笼状弹簧a与螺旋弹簧钢丝连接的局部结构示意图。
25.图4为本发明中笼状弹簧a和笼状弹簧b串联组装示意图。
26.图5为本发明中展开机构完全收拢状态示意图。
27.其中,1、笼状弹簧a,2、笼状弹簧b,3、卷绳器,4、力传感器,5、基座,6、载荷安装板,
7、隔环,8、采样/探测设备,1-1、前端支撑圆环,1-2、后端支撑圆环,1-3、中间支撑圆环,1-4、左旋弹簧钢丝,1-5、弹簧钢丝端子,1-6、销轴a,1-7、销轴b,3-1、卷绳电机,3-2、电机支架,3-3、小齿轮,3-4、大齿轮,3-5、角接触球轴承,3-6、绞盘,3-7、定滑轮,3-8、钢丝绳。
具体实施方式
28.下面结合附图并举实施例,对本发明进行详细描述。
29.本实施例提供了一种用于小行星采样探测的变刚度展开机构,采用笼状弹簧作为展开驱动结构,通过力传感器对前端接触力进行实时测量,并通过卷绳器调节钢丝绳的张紧力,实现展开机构变刚度控制,保证前端采样/探测设备在与不同特性星表接触工作的过程中,均能获得理想的接触压力,具有重量轻、展收比大、适应性强、控制简单等特点。
30.如图1所示,该变刚度展开机构包括:笼状弹簧a1、笼状弹簧b2、卷绳器3、力传感器4、基座5和载荷安装板6;
31.所述笼状弹簧a1的一端与笼状弹簧b2的一端通过隔环7同轴串联,且二者旋向相反;笼状弹簧a1的另一端通过螺钉与基座5的前端连接,笼状弹簧b2的另一端通过螺钉与载荷安装板6的后端连接;载荷安装板6的前端安装有采样/探测设备8;力传感器4安装于载荷安装板6与采样/探测设备8之间,可实时测量采样/探测设备8工作时的反作用力;卷绳器3安装在基座5上;该变刚度展开机构整体通过基座5安装在探测器上;其中,探测器所在端为该变刚度展开机构的后端,采样/探测设备8所在端为该变刚度展开机构的前端。
32.本实施例中,如图2和图3所示,所述笼状弹簧a1由左旋弹簧钢丝1-4、弹簧钢丝端子1-5、销轴a1-6、销轴b1-7、前端支撑圆环1-1、后端支撑圆环1-2和中间支撑圆环1-3组成;
33.前端支撑圆环1-1圆周面上沿周向均布12处相同尺寸的销孔(孔轴向与前端支撑圆环1-1的径向平行),每个销孔中销接有一个销轴a1-6,12根左旋弹簧钢丝1-4的一端分别通过弹簧钢丝端子1-5转动连接在销轴a1-6上;其中,每根左旋弹簧钢丝1-4两端分别通过紧定螺钉设有弹簧钢丝端子1-5,每个弹簧钢丝端子1-5上开有销孔;
34.后端支撑圆环1-2采用相同方式与12根左旋弹簧钢丝1-4的另一端实现销轴连接,保证12根左旋弹簧钢丝1-4相对后端支撑圆环1-2可转动;
35.中间支撑圆环1-3上沿周向均匀转动连接有12个销轴b1-7,每个销轴b1-7沿径向开有通孔,对应的左旋弹簧钢丝1-4从该通孔中穿过,实现中间支撑圆环1-3通过销轴b1-7与12根左旋弹簧钢丝1-4连接;笼状弹簧a1压缩或伸长过程中,销轴a1-6和销轴b1-7可在前端支撑圆环1-1、后端支撑圆环1-2及中间支撑圆环1-3上转动,以适应左旋弹簧钢丝1-4螺旋升角的变化。
36.本实施例中,所述笼状弹簧b2中除右旋弹簧钢丝与左旋弹簧钢丝1-4不同外,其余组成结构与笼状弹簧a1相同。
37.本实施例中,如图4所示,所述卷绳器3由卷绳电机3-1、电机支架3-2、小齿轮3-3、大齿轮3-4、角接触球轴承3-5、绞盘3-6、定滑轮3-7和钢丝绳3-8组成;绞盘3-6通过一对角接触球轴承3-5安装于基座5上,卷绳电机3-1通过电机支架3-2支撑在基座5上,并通过一级直齿轮减速驱动绞盘3-6转动(小齿轮3-3安装于卷绳电机3-1输出端,大齿轮3-4与绞盘3-6通过螺钉固定连接,且小齿轮3-3与大齿轮3-4啮合);绞盘3-6的回转轴线与笼状弹簧a1及笼状弹簧b2的轴线同轴,三根钢丝绳3-8根部沿绞盘3-6的周向均匀固定于绞盘3-6上(即三
组钢丝绳3-8根部呈中心对称布置),出线点的位置亦呈中心对称布置,每根钢丝绳3-8出线位置一侧设有定滑轮3-7,且每个定滑轮3-7通过螺钉安装于基座5上,每根钢丝绳3-8通过对应的定滑轮3-7由水平缠绕取向转为垂直拉伸取向,每根钢丝绳3-8的活动端通过紧定螺钉连接到载荷安装板6上的固定点位置处,载荷安装板6上固定点位置与卷绳器3出线点位置一一对应,保证钢丝绳3-8张紧后处于铅直状态,绞盘3-6转动可实现三根钢丝绳3-8的同步收卷或释放,三根钢丝绳3-8合力作用线与笼状弹簧a1及笼状弹簧b2的轴线同轴,展收过程中,载荷安装板6保持与基座5平行。
38.该变刚度展开机构的工作原理为:
39.如图5所示,该变刚度展开机构收拢时,笼状弹簧a1和笼状弹簧b2处于压缩状态,该变刚度展开机构整体由笼状弹簧a1和笼状弹簧b2的回复力驱动展开;卷绳器3通过其上设置的钢丝绳3-8的收放来控制载荷安装板6及其前端的采样/探测设备8的展开或收拢行程;在采样/探测设备8与星表接触工作过程中,力传感器4实时对采样/探测设备8的作用反力进行测量;
40.具体地,需要展开时,卷绳电机3-1控制绞盘3-6逆时针旋转,释放钢丝绳3-8,机构整体在笼状弹簧a1和笼状弹簧b2的回复力驱动下展开;需要收拢时,卷绳电机3-1驱动绞盘3-6顺时针旋转,绞盘3-6克服笼状弹簧a1和笼状弹簧b2的回复力回收钢丝绳3-8,并将载荷安装板6向上提拉,实现机构的收拢;
41.卷绳电机3-1通过控制钢丝绳3-8的收放量及收放速度控制机构展开行程及展开速度;笼状弹簧a1和笼状弹簧b2在机构整体展开或收拢过程中,由于前端支撑圆环1-1、后端支撑圆环1-2和中间支撑圆环1-3的限位作用,其螺旋弹簧钢丝(左旋弹簧钢丝1-4和右旋弹簧钢丝)的旋绕直径不变,螺旋升角随笼状弹簧a1和笼状弹簧b2展开而增大;由于笼状弹簧a1和笼状弹簧b2为串联反旋设计,笼状弹簧a1和笼状弹簧b2端部在展收过程中的转动扭矩互相抵消,载荷安装板6相对基座5的位姿不发生扭转,保证了在不同展开高度下,前端的采样/探测设备8对星表的接触姿态稳定可控;
42.在采样/探测设备8与星表接触工作过程中,假设采样/探测设备8处于平衡状态,则其对星表的接触力与钢丝绳3-8上张紧力之和等于笼状弹簧a1和笼状弹簧b2的回复力;由于展开行程已知,笼状弹簧a1和笼状弹簧b2的回复力可预知,卷绳器3通过调节绞盘3-6的扭矩输出调节钢丝绳3-8上的张紧力,即可控制笼状弹簧a1和笼状弹簧b2实际作用到采样/探测设备8上的下压力,改变展开机构的等效刚度,保证前端工作压力或作用反力保持在允许范围内。
43.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。