1.本发明涉及微型飞行器领域,具体来说是一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器。
背景技术:
2.近年来,随着微机电行业的快速发展,微型飞行器日益成熟。微型飞行器可广泛应用于侦察监视、定点爆破、拟态观测和搜救巡逻等军用和民用领域。
3.微型飞行器尺寸小、飞行速度低,其飞行时多处于低雷诺数的流场下。相较于固定翼和旋翼类微型飞行器而言,仿生扑翼微型飞行器在低雷诺数下气动效率更高,因此更适合微型化。另一方面,仿生扑翼微型飞行器由于其具有仿生外观、尺寸小等优势,更具有隐蔽性。因此,仿生扑翼微型飞行器也成为目前微型飞行器的设计热点。
4.自然界中的昆虫往往通过控制翅膀的运动参数实现姿态控制,昆虫姿态控制的实现手段主要分为两种:一种是保持拍动运动不变,改变扑翼攻角,从而产生控制力矩;另一种是保持扑翼攻角不动,改动拍动运动,从而产生控制力矩。对于仿生扑翼微型飞行器而言,如何实现仿生控制运动是其设计的一大难题。现有的仿生扑翼微型飞行器多采用第一种控制方法设计,即采用翼根偏转的方案实现扑翼的攻角改变,从而产生控制力矩。该控制方法的不足在于由于翼膜是柔性材料,因此翼根偏转造成的翼膜攻角改变难以精准量化,无法对控制力矩的产生进行精准评估。相较之下,改变扑翼拍动运动则可以通过对运动的精准改变,评估出气动力的变化,进一步精准评估产生的控制力矩大小。但改变扑翼的拍动运动需要对高速转动机构进行控制,传统的连杆驱动机构难以在微型化的基础上对高速转动的连杆运动进行改变,因此有必要发明一些扑翼运动参数可精准控制的仿生微型扑翼飞行器,并进一步发展其飞行控制方法。
技术实现要素:
5.本发明针对现有仿生扑翼微型飞行器大多通过扑翼攻角的控制来获得控制力矩的现状,为解决该方案控制力矩产生难以量化、扑翼拍动运动难以有效控制和控制过程中气动效率下降的问题,提出了一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器,该飞行器设计方案可分别对左、右扑翼的拍动幅度进行连续调节,实现扑翼拍动运动和控制力矩的精准控制。
6.一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器包括传动系统、控制系统、动力系统和升力系统。
7.所述传动系统包括上底座、下底座、分布齿轮减速组、连杆和传动放大装置。上底座设计有动力系统的安装腔体和分布齿轮减速组的安装孔位,用于固定动力装置和分布齿轮减速组。下底座设计有传动放大装置和控制执行机构的安装孔位,用于固定传动放大装置的中心带轮以及控制系统的控制执行机构。分布齿轮减速组包括主轴齿轮、单层齿轮和
双层齿轮,其中主轴齿轮安装于动力装置输出轴上,单层齿轮和双层齿轮分别安装于上底座的预定孔位中,双层齿轮中大齿数齿轮与主轴齿轮啮合,小齿数齿轮与单层齿轮啮合。所述分布齿轮减速组将动力装置的高速转动转为单层齿轮的低速转动。连杆两端连接单层齿轮和中心带轮,使之形成双摇杆机构。连杆将单层齿轮的圆周运动转换为中心带轮的小幅度往复转动。传动放大装置包括中心带轮、左分裂式小带轮、右分裂式小带轮、左传动带、右传动带、左翼杆和右翼杆。中心带轮为一圆形结构,侧面有环形凹槽,用于限制左、右传动带运动,中心为十字轮辐结构用于加强中心带轮的强度。左、右分裂式小带轮结构相同,均由至少两个“t”型圆弧结构组成,“t”型圆弧结构可由控制系统的转动盘带动向外滑动,以增加分裂式小带轮的等效直径。左传动带以预张紧的方式绕于中心带轮和左分裂式小带轮的凹槽中,右传动带以预张紧的方式,呈“8”字型绕于中心带轮和右分裂式小带轮的凹槽中。左、右传动带绕左、右分裂式小带轮的部分有一段凸出皮带,凸出部分挖空有一圆孔,用于带动扑翼转动。左、右翼杆分别与控制系统的左、右带轮固定件的中心孔铆接,并可沿带轮固定件的中心孔自由转动,左、右翼杆侧缘分别有一圆孔用于与升力系统的主梁固连。动力装置的高速转动,经齿轮减速组减速,由连杆带动中心带轮小幅度往复转动,从而带动左、右传动带牵引左、右翼杆沿带轮固定件的中心孔做往复转动。由于左、右分裂式小带轮的直径小于中心带轮的直径,因此将中心带轮的往复转动幅度进行放大,实现扑翼大幅拍动。
8.所述控制系统包含左旋转舵机、左转动盘、左带轮固定件、右旋转舵机、右转动盘和右带轮固定件。左、右旋转舵机分别固定于下底座对应的控制机构安装腔体中,左、右转动盘分别固连于左、右旋转舵机的输出转轴上,左、右转动盘上均布有至少2个弧形滑槽,左、右分裂式小带轮的“t”型圆弧结构下端有圆柱,可分别绕左、右转动盘的弧形滑槽自由滑动,左、右带轮固定件通过六个弧形耳片分别固定于下底座的带轮固定件凹槽中,左、右带轮固定件分别沿圆周均布有六个滑槽,左、右分裂式小带轮的“t”型圆弧可沿左、右带轮固定件的滑槽向外滑动。左、右旋转舵机转动,带动左、右转动盘转动,从而使得左、右分裂式小带轮的“t”型圆弧沿着左、右带轮固定件的滑槽滑动,改变左、右分裂式小带轮的等效直径,实现拍动运动幅度的调节。
9.所述动力系统为仿生扑翼微型飞行器的动力源,驱动系统机构实现扑翼的拍动运动。动力系统包含动力装置,动力装置可采用空心杯电机或无刷电机。
10.所述升力系统包含左右两个扑翼,每个扑翼由主梁、柔性梁、竖梁和翼膜组成。所述翼膜为柔性膜,采用聚亚酰胺材料,翼膜的前缘和侧缘分别裹成管状后用粘结剂固定。所述主梁和竖梁分别穿过翼膜前缘和侧缘所形成的管状空间,并可绕管状空间自由转动。竖梁呈90
°
搭于主梁下方,柔性梁粘接在翼膜一侧,与主梁呈30
°
夹角;主梁翼根端与传动系统的翼杆连接。
11.一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器滚转控制的实施过程为:
12.(1)当飞行器需要左滚转力矩产生时,左旋转舵机的输出轴带动左转动盘逆时针旋转,左转动盘上的弧形滑槽带动左分裂式小带轮的“t”型圆弧下端的圆柱滑动,从而左分裂式小带轮的“t”型圆弧沿着左带轮固定件的滑槽向外滑出,左分裂式小带轮的等效直径增加,左分裂式小带轮的等效直径与中心带轮直径之比增加,从而左传动带沿左分裂式小带轮部分转动幅度减小,带动左翼杆转动幅度相应减小。右旋转舵机的输出轴带动右转动
盘顺时针旋转,右转动盘上的弧形滑槽带动右分裂式小带轮的“t”型圆弧下端的圆柱滑动,从而右分裂式小带轮的“t”型圆弧沿着右带轮固定件的滑槽向内滑回,右分裂式小带轮的等效直径减小,右分裂式小带轮的等效直径与中心带轮直径之比减小,从而右传动带沿右分裂式小带轮部分转动幅度增大,带动右翼杆转动幅度相应增大。由于左扑翼拍动运动幅度减小,右扑翼拍动运动幅度增大,因此左侧扑翼拍动运动产生的气动力减小,右侧扑翼拍动运动产生的气动力增大,由于左右侧扑翼气动力差,产生左滚力矩。
13.(2)当飞行器需要右滚转力矩产生时,右旋转舵机的输出轴带动右转动盘逆时针旋转,右转动盘上的弧形滑槽带动右分裂式小带轮的“t”型圆弧下端的圆柱滑动,从而右分裂式小带轮的“t”型圆弧沿着右带轮固定件的滑槽向外滑出,右分裂式小带轮的等效直径增加,右分裂式小带轮的等效直径与中心带轮直径之比增加,从而右传动带沿右分裂式小带轮部分转动幅度减小,带动右翼杆转动幅度相应减小,由于右扑翼拍动运动幅度减小。左旋转舵机的输出轴带动左转动盘顺时针旋转,左转动盘上的弧形滑槽带动左分裂式小带轮的“t”型圆弧下端的圆柱滑动,从而左分裂式小带轮的“t”型圆弧沿着左带轮固定件的滑槽向内滑回,左分裂式小带轮的等效直径减小,左分裂式小带轮的等效直径与中心带轮直径之比减小,从而左传动带沿左分裂式小带轮部分转动幅度增大,带动左翼杆转动幅度相应增大。由于右扑翼拍动运动幅度减小,左扑翼拍动运动幅度增大,因此右侧扑翼拍动运动产生的气动力减小,左侧扑翼拍动运动产生的气动力增大,由于左右侧扑翼气动力差,产生右滚力矩。
14.本发明的优点在于:
15.(1)一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器,通过带传动的方式替代传统连杆机构,实现仿生拍动运动,降低了机构的复杂程度,且由于传送带具有一定储能功能,相较于传统四连杆拍动机构,能够有效平滑仿生扑翼微型飞行器的拍动运动,降低飞行器的结构噪音。
16.(2)一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器,通过分裂式小带轮和转动盘的设计,可利用两个旋转舵机精准、连续地改变左右翼拍动幅度,保证控制力矩产生的同时,飞行器升力保持不变,能实现滚转机动。
附图说明
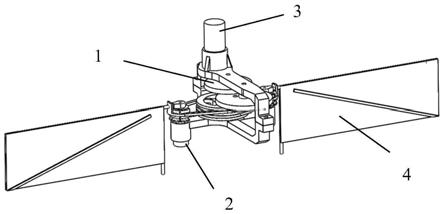
17.图1是本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的整体示意图;
18.图2是本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的传动系统部分示意图;
19.图3是本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的传动系统部分示意图二;
20.图4是本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的控制系统示意图;
21.图5是本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的“t”型圆弧结构示意图;
22.图6是本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的升
力系统示意图;
23.图中:
24.1-传动系统;2-控制系统;3-动力系统;4-升力系统;
25.101-上底座;102-下底座;103-主轴齿轮;104-单层齿轮;
26.105-双层齿轮;106
–
连杆;107
–
中心带轮;108
–
左分裂式小带轮;
27.109-右分裂式小带轮;110
‑“
t”型圆弧;111-左传动带;112-右传动带;
28.113-左翼杆;114-右翼杆;
29.201-左旋转舵机;202-左转动盘;203-左带轮固定件;204-右旋转舵机;
30.205-右转动盘;206-右带轮固定件;
31.301-动力装置
32.401-主梁;402-柔性梁;403-竖梁;404-翼膜;
具体实施方式
33.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
34.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
35.图1为本发明一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器的整体示意图,包括传动系统1、控制系统2、动力系统3和升力系统4组成。
36.图2和图3示出了所述传动系统1的一示例性实施方式,包括上底座101、下底座102、分布齿轮减速组、连杆103和传动放大装置。上底座101设计有动力系统2的安装腔体和分布齿轮减速组的安装孔位,用于固定动力装置301和分布齿轮减速组。下底座102设计有传动放大装置的安装孔和控制执行机构安装孔位,用于固定传动放大装置的中心带轮107以及控制系统的控制执行机构。分布齿轮减速组包括主轴齿轮103、单层齿轮104和双层齿轮105。主轴齿轮103安装于动力装置301的输出轴上,单层齿轮104和双层齿轮105分别安装于上底座101的预定孔位中,双层齿轮105中大齿数齿轮与主轴齿轮103啮合,小齿数齿轮与单层齿轮104啮合。连杆106两端有两个不同直径的圆形凸台,连杆106带小直径凸台的一端连接在单层齿轮104的偏心孔位上,带大直径凸台的一端通过铆钉与传动放大装置的中心带轮107上的偏心孔同轴连接。传动放大装置包括中心带轮107、左分裂式小带轮108、右分裂式小带轮109、左传动带111、右传动带112、左翼杆113和右翼杆114。中心带轮107为一圆形结构,侧面有上下分布的两个环形凹槽,分别用于限制左、右传动带脱落,中心为十字轮辐结构用于加强中心带轮107的强度。左分裂式小带轮108和右分裂式小带轮109分别由四个“t”型圆弧110结构组成,“t”型圆弧110的直线段插于控制系统的带轮固定件的凹槽中,直线段的下端有一圆柱形凸台,圆柱形凸台可沿控制系统的转动盘内的滑槽滑动,从而使得“t”型圆弧110结构向外滑动,增加分裂式小带轮的等效直径。左传动带111以预张紧的方式绕于中心带轮107的上端凹槽和左分裂式小带轮108的凹槽中,右传动112带以预张紧的方式,呈“8”字型绕于中心带轮107的下端凹槽和右分裂式小带轮109的凹槽中。左传动带
111和右传动带112分别在绕左分裂式小带轮108和右分裂式小带轮109的部分有一段凸出皮带,凸出部分挖空有一圆孔,用于带动扑翼转动。左翼杆113和右翼杆114分别与控制系统的左带轮固定件203和右带轮固定件206的中心孔铆接,并可分别沿左带轮固定件203和右带轮固定件206的中心孔自由转动,左翼杆113和右翼杆114侧缘有一圆孔用于与升力系统的主梁401固连。动力装置301的电机高速转动,经齿轮减速组减速、连杆106传动后带动中心带轮107小幅度往复转动,从而带动左传动带111和右传动带112往复转动,左翼杆113和右翼杆114分别在左传动带111和右传动带112的往复转动下,沿左带轮固定件203和右带轮固定件206的中心孔做往复转动,同时左分裂式小带轮108和右分裂式小带轮的直径109小于中心带轮107的直径,因此将中心带轮107的往复转动幅度进行放大,实现扑翼大幅拍动。
37.图4和图5示出了所述控制系统2的一示例性实施方式,包含左旋转舵机201、左转动盘202、左带轮固定件203、右旋转舵机204、右转动盘205和右带轮固定件206。左旋转舵机201固定于下底座102的控制机构安装腔体中,左转动盘202固连于左旋转舵机201的输出转轴上,左转动盘202上均布有六个弧形滑槽,左分裂式小带轮108的“t”型圆弧结构220下端圆柱可绕弧形滑槽自由滑动,左带轮固定件203通过六个弧形耳片固定于下底座102的带轮固定件凹槽中,左带轮固定件203沿圆周均布有六个滑槽,左分裂式小带轮108的“t”型圆弧110可沿滑槽向外滑动。右旋转舵机204固定于下底座102的控制机构安装腔体中,右转动盘205固连于右旋转舵机204的输出转轴上,右转动盘205上均布有六个弧形滑槽,右分裂式小带轮109的“t”型圆弧结构110下端圆柱可绕弧形滑槽自由滑动,右带轮固定件206通过六个弧形耳片固定于下底座102的带轮固定件凹槽中,右带轮固定件206沿圆周均布有六个滑槽,右分裂式小带轮109的“t”型圆弧110可沿滑槽向外滑动。左旋转舵机201和右旋转舵机204转动,带动左转动盘202和右转动盘205转动,从而使得左分裂式小带轮108和右分裂式小带轮109的“t”型圆弧沿着左带轮固定件203和右带轮固定件206的滑槽滑动,改变左分裂式小带轮108和右分裂式小带轮109的等效直径,实现拍动运动幅度的调节。
38.所述动力系统3为仿生扑翼微型飞行器的动力源,驱动系统机构实现扑翼的拍动运动。动力系统包含动力装置301,动力装置301可采用空心杯电机或无刷电机。
39.图6示出了所述升力系统4的一示例性实施方式,所述升力系统包含左、右两个扑翼,每个扑翼由主梁401、柔性梁402、竖梁403和翼膜404组成。所述翼膜404为柔性膜,采用聚亚酰胺材料,翼膜404的前缘和侧缘分别裹成管状后用粘结剂固定。所述主梁401和竖梁403分别穿过翼膜404前缘和侧缘所形成的管状空间,并可绕管状空间自由转动。竖梁403呈90
°
搭于主梁下方,柔性梁402粘接在翼膜404一侧,与主梁401呈30
°
夹角;主梁401翼根端与传动系统1的翼杆连接。
40.所述一种利用翼拍动幅度差动进行滚转控制的仿生扑翼微型飞行器滚转控制的实施过程为:
41.当飞行器需要左滚转力矩产生时,左旋转舵机201的输出轴带动左转动盘202逆时针旋转,左转动盘202上的弧形滑槽带动左分裂式小带轮108的“t”型圆弧110下端的圆柱滑动,从而左分裂式小带轮108的四个“t”型圆弧110沿着左带轮固定件203的滑槽向外滑出,左分裂式小带轮108的等效直径增加,左分裂式小带轮108的等效直径与中心带轮107直径之比增加,从而左传动带111沿左分裂式小带轮108部分转动幅度减小,带动左翼杆113转动幅度相应减小。右旋转舵机204的输出轴带动右转动盘205顺时针旋转,右转动盘205上的弧
形滑槽带动右分裂式小带轮109的“t”型圆弧110下端的圆柱滑动,从而右分裂式小带轮109的四个“t”型圆弧110沿着右带轮固定件206的滑槽向内滑回,右分裂式小带轮109的等效直径减小,右分裂式小带轮109的等效直径与中心带轮107直径之比减小,从而右传动带112沿右分裂式小带轮109部分转动幅度增大,带动右翼杆114转动幅度相应增大。由于左扑翼拍动运动幅度减小,右扑翼拍动运动幅度增大,因此左侧扑翼拍动运动产生的气动力减小,右侧扑翼拍动运动产生的气动力增大,由于左右侧扑翼气动力差,产生左滚力矩。
42.当飞行器需要右滚转力矩产生时,右旋转舵机204的输出轴带动右转动盘205逆时针旋转,右转动盘205上的弧形滑槽带动右分裂式小带轮109的“t”型圆弧110下端的圆柱滑动,从而右分裂式小带轮109的四个“t”型圆弧110沿着右带轮固定件206的滑槽向外滑出,右分裂式小带轮109的等效直径增加,右分裂式小带轮109的等效直径与中心带轮117直径之比增加,从而右传动带112沿右分裂式小带轮109部分转动幅度减小,带动右翼杆114转动幅度相应减小,由于右扑翼拍动运动幅度减小。左旋转舵机201的输出轴带动左转动盘202顺时针旋转,左转动盘202上的弧形滑槽带动左分裂式小带轮109的“t”型圆弧110下端的圆柱滑动,从而左分裂式小带轮108的四个“t”型圆弧110沿着左带轮固定件203的滑槽向内滑回,左分裂式小带轮109的等效直径减小,左分裂式小带轮108的等效直径与中心带轮107直径之比减小,从而左传动带111沿左分裂式小带轮108部分转动幅度增大,带动左翼杆113转动幅度相应增大。由于右扑翼拍动运动幅度减小,左扑翼拍动运动幅度增大,因此右侧扑翼拍动运动产生的气动力减小,左侧扑翼拍动运动产生的气动力增大,由于左右侧扑翼气动力差,产生右滚力矩。