1.本实用新型属于无人机技术领域,特别涉及一种基于无人机的实时侦察人机互联多目标监测系统。
背景技术:
2.侦察是无人机与生俱来的使命,以无人机为载体的远距离非接触性侦察技术已成为情报收集的主要技术手段,相对卫星侦察具有其自身优点,如成本低、侦察地域控制灵活、不存在访问时间和周期限制、地面目标分辨率高等,相对有人侦察机而言,又昼夜可持续工作、不考虑飞行员疲劳和伤亡等因素,因此,鉴于无人机具有高分辨率、高灵活性、高效率和低成本的优势而被广泛应用于自然灾害区域评估、战场侦察、环境监测等军用和民用领域,但是,现如今的无人机侦察系统对多目标侦察监测技术不足,因此,现亟需一种基于无人机的实时侦察人机互联多目标监测系统,来解决以上问题。
技术实现要素:
3.针对现有技术存在的不足,本实用新型目的是提供一种基于无人机的实时侦察人机互联多目标监测系统,解决上述背景技术中提出的问题。
4.本实用新型通过以下的技术方案实现:一种基于无人机的实时侦察人机互联多目标监测系统,包括:机身、左机翼、右机翼以及摄像头,所述机身左侧设置有左机翼,所述左机翼与机身固定连接,所述机身右侧设置有右机翼,所述右机翼与机身固定连接,所述摄像头设置在机身头部上方,所述摄像头与机身连接,传输天线设置在摄像头前侧,所述摄像头与机身连接,所述左机翼和右机翼下表面左右两侧分别设置有一个夜视摄像,所述夜视摄像与左机翼和右机翼连接,所述机身头部下方设置有热成像监测仪,所述热成像监测仪与机身连接,所述热成像监测仪上方设置有红外线监测仪,所述红外线监测仪与机身连接,两个雷达监测仪设置在左机翼和右机翼下方内侧,两个雷达监测仪与左机翼和右机翼连接。
5.作为一优选的实施方式,所述机身头部下方设置有探照灯,所述电力驱动单元通过电线与探照灯连接。
6.作为一优选的实施方式,所述机身尾部左侧设置有左副翼,所述机身与左副翼固定连接,所述机身尾部右侧设置有右副翼,所述机身与右副翼连接,左副翼通过连接架与左机翼连接,右副翼通过连接架与右副翼连接。
7.作为一优选的实施方式,所述机身内部下方设置有数据传输端,数据传输端上方设置有单片机,单片机上方设置有图像传输单元,电力驱动单元设置在图像传输单元上方。
8.作为一优选的实施方式,所述图像传输单元输入端与摄像头输出端连接,所述图像传输单元输入端与夜视摄像输出端连接,所述数据传输端输入端与图像传输单元输出端连接,所述热成像监测仪输出端与单片机输入端连接,所述雷达监测仪输出端与单片机输入端连接,所述红外线监测仪输出端与单片机输入端连接,所述电力驱动单元输入端与单片机输出端连接,所述数据传输端输入端与单片机输出端连接,所述传输天线输入端与数
据传输端输出端连接。
9.作为一优选的实施方式,所述机身后端设置有两个尾翼,所述机身与两个尾翼固定连接。
10.采用了上述技术方案后,本实用新型的有益效果是:通过设置两个雷达监测仪和红外线监测仪,能够对多种目标进行侦察和监测,使得本实用新型更加实用,通过设置热成像监测仪,能够将目标轮廓显现,使观察人员更易判断目标类型,在实际使用的时候,更适合无人机技术领域。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
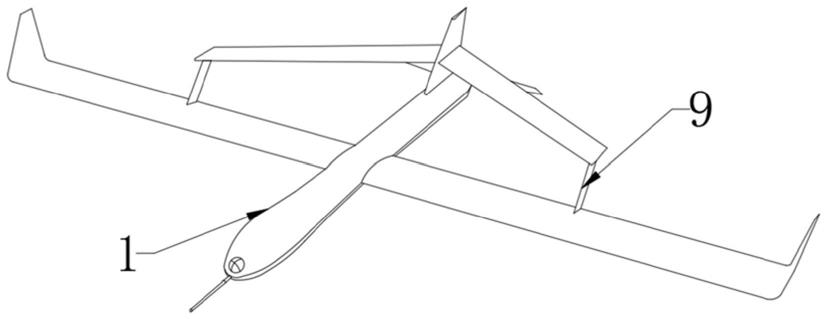
12.图1为本实用新型一种基于无人机的实时侦察人机互联多目标监测系统的立体结构示意图。
13.图2为本实用新型一种基于无人机的实时侦察人机互联多目标监测系统的俯视结构示意图。
14.图3为本实用新型一种基于无人机的实时侦察人机互联多目标监测系统的仰视结构示意图。
15.图4为本实用新型一种基于无人机的实时侦察人机互联多目标监测系统的内部剖视结构示意图。
16.图5为本实用新型一种基于无人机的实时侦察人机互联多目标监测系统的工作流程框图。
17.图中,1-机身、2-摄像头、3-传输天线、4-左机翼、5-右机翼、6-左副翼、7-右副翼、8-尾翼、9-连接架、10-夜视摄像、11-探照灯、12-热成像监测仪、13-红外线监测仪、14-雷达监测仪、15-数据传输端、16-单片机、17
‑ꢀ
图像传输单元、18-电力驱动单元。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1至图5,本实用新型提供一种技术方案:一种基于无人机的实时侦察人机互联多目标监测系统,包括:机身1、左机翼4、右机翼5以及摄像头2,机身1左侧设置有左机翼4,左机翼4与机身1固定连接,机身1右侧设置有右机翼5,右机翼5与机身1固定连接,摄像头2设置在机身1头部上方,摄像头2与机身1连接,传输天线3设置在摄像头2前侧,摄像头2 与机身1连接,左机翼4和右机翼5下表面左右两侧分别设置有一个夜视摄像10,夜视摄像10与左机翼4和右机翼5连接,机身1头部下方设置有热成像监测仪12,热成像监测仪12与机身1连接,热成像监测仪12上方设置有红外线监测仪13,红外线监测仪13与机身1连接,两个
雷达监测仪14设置在左机翼4和右机翼5下方内侧,两个雷达监测仪14与左机翼4和右机翼5 连接,通过设置热成像监测仪12,能够生成热图像和温度值,对物体进行监测,通过设置雷达监测仪14,能够对目标进行追踪。
20.机身1头部下方设置有探照灯11,电力驱动单元18通过电线与探照灯 11连接,探照灯11能够照亮地面暗处。
21.机身1尾部左侧设置有左副翼6,机身1与左副翼6固定连接,机身1尾部右侧设置有右副翼7,机身1与右副翼7连接,左副翼6通过连接架9与左机翼4连接,右副翼7通过连接架9与右副翼7连接,左副翼7和右副翼7 能够控制机身1的转向角度。
22.机身1内部下方设置有数据传输端15,数据传输端15上方设置有单片机16,单片机16上方设置有图像传输单元17,电力驱动单元18设置在图像传输单元17上方,数据传输端15能够传输监测数据。
23.图像传输单元17输入端与摄像头2输出端连接,图像传输单元17输入端与夜视摄像10输出端连接,数据传输端15输入端与图像传输单元17输出端连接,热成像监测仪12输出端与单片机16输入端连接,雷达监测仪14输出端与单片机16输入端连接,红外线监测仪13输出端与单片机16输入端连接,电力驱动单元18输入端与单片机16输出端连接,数据传输端15输入端与单片机16输出端连接,传输天线3输入端与数据传输端15输出端连接,这种连接方式更加稳定。
24.机身1后端设置有两个尾翼8,机身1与两个尾翼8固定连接,尾翼8能够增加飞行的稳定性。
25.作为本实用新型的一个实施例:在实际使用的时候,观察人员通过地面遥控传输信号至单片机16中,单片机16控制电力驱动单元18启动,电力驱动单元18使无人机升空,在高空时,设置在机身1头部的摄像头2能够拍摄高空情况,通过图像传输单元17传输至数据传输端15,数据传输端15将摄像头2拍摄的图像通过传输天线3传输至地面监测仪器中,使观察人员实时观察高空情况,热成像监测仪12能够监测红外能量或热量,并将其转换为电信号,通过传输天线3向地面监测仪器中生成热图像和温度值,并可以对温度值进行计算,红外线监测仪13能够利用红外辐射原理对材料表面进行监测,通过传输天线3传输至地面监测仪器中,雷达监测仪14能够根据接收到的反射波频移量的计算而得出被测物体的运动速度,雷达波束照射面大,更易捕捉目标,夜视摄像10能够在夜间拍摄目标,产生的图像通过图像传输单元17 传输至传输天线3传输天线传输至观察人员的监测仪器中,遥控信号通过传输天线3传输至数据传输端15中,数据传输端15将遥控信号传输至单片机 16中,单片机16控制机身1内部仪器的运行,单片机16控制电力驱动单元 18对无人机的行进方向和速度进行改变。
26.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。