1.本技术涉及电池充电技术领域,特别涉及一种电动载人飞行器的动力装置和电动载人飞行器。
背景技术:
2.多旋翼电动载人飞行器的动力系统中,一般每个电池连接电调,每个电调连接一个电机,电机带动螺旋桨转动,实现飞行器的起降和飞行。通常情况下,一个电调对应一个电机进行控制,当电动载人飞行器长时间往一边飞行的时候,就会导致一边的电池电离消耗比较大,另一边的电池电量消耗小,电池动力系统放电就会不均匀。
技术实现要素:
3.有鉴于此,本技术的实施例提供了一种电动载人飞行器的动力装置和电动载人飞行器。
4.本技术实施方式的电动载人飞行器的动力装置,包括:
5.多个电机组,一个所述电机组包括多个电机;
6.与所述多个电机组对应的多个电池组,一个电池组包括多个电池,所述电池组中的每个电池均独立与对应的所述电机组连接以向所述电机组内多个所述电机供电。
7.在某些实施方式中,所述动力装置包括多个电调,一个所述电调连接一个所述电机,一个所述电机组对应的多个所述电调的电源端相互连接以使对应的所述电池组中的每个电池均独立向对应的所述多个电调供电。
8.在某些实施方式中,所述动力装置包括多个二极管,一个所述二极管的正极和负极分别连接一个所述电池和对应的一个所述电机组,一个所述电机组对应的多个所述二极管的负极相互连接。
9.在某些实施方式中,所述动力装置包括连接线,所述连接线连接一个所述电机组中多个所述电调的电源端和对应的多个所述二极管的负极。
10.在某些实施方式中,所述二极管为理想二极管。
11.在某些实施方式中,所述动力装置包括电池动力模块和与所述电池动力模块连接的多个第一继电器,一个所述电池通过一个所述第一继电器连接对应的一个所述二极管。
12.在某些实施方式中,所述动力装置还包括备用电池组,所述备用电池组包括至少一个电池,所述备用电池组通过多个第二继电器分别连接对应的所述多个二极管。
13.在某些实施方式中,所述电池组还包括备用电池,所述备用电池通过多个第三继电器连接所述电池组对应的所述多个二极管。
14.在某些实施方式中,所述电池动力模块包括电池检测单元,所述电池检测单元与多个所述电池连接以检测所述电池的电压、电流和/或温度。
15.本技术实施方式提供了一种电动载人飞行器,包括多个旋翼和上述任一实施方式所述的动力装置,一个所述电机连接一个所述旋翼以驱动所述旋翼工作。
16.在某些实施方式中,多个所述旋翼包括多个左旋翼和多个右旋翼,一个所述电机组包括一个左旋翼电机和一个右旋翼电机,所述左旋翼电机连接对应的一个所述左旋翼,所述右旋翼电机连接对应的一个所述右旋翼。
17.在某些实施方式中,多个所述旋翼包括多个前旋翼和多个后旋翼,一个所述电机组包括一个前旋翼电机和一个后旋翼电机,所述前旋翼电机连接对应的一个所述前旋翼,所述后旋翼电机连接对应的一个所述后旋翼。
18.本技术实施方式的电动载人飞行器的动力装置和电动载人飞行器中,通过使用电池组中单独的电池向电机组中的多个电机供电,能够平衡电池组中多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行。
19.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
20.本技术上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
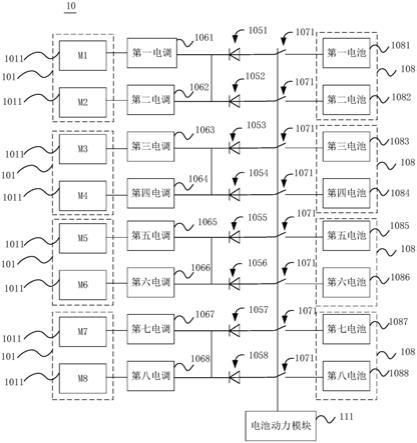
21.图1是本技术实施方式的动力装置的模块示意图。
22.图2是本技术实施方式的电机分布示意图。
23.图3是本技术实施方式的动力装置的模块示意图。
24.图4是本技术实施方式的动力装置的模块示意图。
25.图5是本技术实施方式的电机分布示意图。
26.主要元件符号说明:
27.动力装置10,电机组101,电机1011,左旋翼电机m2、m4、m6和m8,右旋翼电机m1、m3、m5和m7,前旋翼电机m1'、m3'、m5'和m7',后旋翼电机m2'、m4'、m6'和m8',第一二极管1051,第二二极管1052,第三二极管1053,第四二极管1054,第五二极管1055,第六二极管1056,第七二极管1057,第八二极管1058,第一电调1061,第二电调1062,第三电调1063,第四电调1064,第五电调1065,第六电调1066,第七电调1067,第八电调1068,第一继电器1071,第二继电器1072,第三继电器1073,电池组108,备用电池组1010,第一电池1081,第二电池1082,第三电池1083,第四电池1084,第五电池1085,第六电池1086,第七电池1087,第八电池1088,备用电池1089,飞行控制模块109,电池动力模块111。
具体实施方式
28.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
29.请一并参阅图1,本技术实施方式提供了一种电动载人飞行器的动力装置10,动力装置10包括多个电机组101和与多个电机组101对应的多个电池组108。其中,一个电机组101包括多个电机1011。一个电池组108包括多个电池,电池组108中的每个电池均独立与对应的电机组101连接以向电机组内多个电机1011供电。
30.具体地,在电动载人飞行器较长时间保持同一侧方向飞行、或朝向某一侧的飞行
时长远大于另一侧的飞行时长的情况下,控制飞行方向一侧旋翼的电机运行功率较小,与该侧电机对应的电池电量消耗较小。而控制飞行方向另一侧旋翼的电机相较之下运行功率较大,与该侧电机对应的电池电量消耗也较大,电池动力系统放电不均。此时对电池进行充电,由于多个电池间的电压差较大,电池并联后,可能会出现电池充电过流的情况,对电池造成损坏,影响飞行安全。
31.本技术实施方式的动力装置10中,通过使用电池组108中单独的电池向电机组101中的多个电机1011供电,能够平衡电池组108中多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行。
32.请一并参阅图2,在一些实施例中,在电动载人飞行器较长时间保持向右飞行、或向右飞行的时长远大于向左飞行的时长的情况下,与左旋翼电机m2、m4、m6和m8对应的电池电量消耗较大,与右旋翼电机m1、m3、m5和m7对应的电池电量消耗较小。也即是说,m2对应的电池电压大于m1对应的电池电压,m4对应的电池电压大于m3对应的电池电压,m6对应的电池电压大于m5对应的电池电压,m8对应的电池电压大于m7对应的电池电压。
33.在电动载人飞行器中设置8个电机m1-m8,m1和m2组成电机组g1,m3和m4组成电机组g2,m5和m6组成电机组g3,m7和m8组成电机组g4。通过使用电压较高的电池向电池组供电,也即是使用m2对应的电池向g1供电,使用m4对应的电池向g2供电,使用m6对应的电池向g3供电,使用m8对应的电池向g4供电,能够平衡电池组108中左旋翼电机m2、m4、m6和m8和右旋翼电机m1、m3、m5和m7对应的多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行,确保电动载人飞行器的飞行安全。
34.可以理解地,在上述实施例中,使用m2对应的电池向g1供电的同时,m1对应的电池也可以继续向电机m1供电。本实施例以电动载人飞行器中设置有8个电机为例,但在实际使用中电机、电池、旋翼等零部件的数量不限于8个。
35.例如,在电动载人飞行器中设置2个电机组和2个电池组,每个电机组包括2个电机,每个电池组包括2个电池,电池组中的每个电池均独立与对应的电机组连接,以向电机组内多个电机供电。又如,在电动载人飞行器中设置8个电机组和8个电池组,每个电机组包括2个电机,每个电池组包括2个电池,电池组中的每个电池均独立与对应的电机组连接,以向电机组内多个电机供电。
36.在某些实施方式中,动力装置10包括多个电调,一个电调连接一个电机1011,一个电机组101对应的多个电调的电源端相互连接以使对应的电池组101中的每个电池1011均独立向对应的多个电调供电。
37.具体地,一个电调连接一个电机1011,一个电调对应控制一个电机,电调可用于控制电机的转速,调节电机的运行功率。如此,能够实现对单个电机的独立控制。由于一个电机对应控制一个或多个旋翼,因此,独立控制单个电机也能够帮助实现电动载人飞行器更灵活地航行。
38.进一步地,一个电机组101对应的多个电调的电源端相互连接,对应的电池组101中的每个电池1011均能够独立向对应的多个电调供电。例如,第一电池1081能够向第一电调1061和第二电调1062供电,第二电池1082能够向第一电调1061和第二电调1062供电。
39.在一些实施例中,电动载人飞行器中设置有8个电机m1-m8和8个电调1061-1068。第一电调1061控制电机m1,第二电调1062控制电机m2,第三电调1063控制电机m3,以此类
推。8个电调对应控制8个电机,控制电动载人飞行器较长时间保持向右飞行。此时,与左旋翼电机m2、m4、m6和m8对应的电池电量消耗较大,与右旋翼电机m1、m3、m5和m7对应的电池电量消耗较小。
40.通过使m1和m2组成电机组g1,m3和m4组成电机组g2,m5和m6组成电机组g3,m7和m8组成电机组g4,并使用m2对应的电池向电机组g1供电,使用m4对应的电池向电机组g2供电,使用m6对应的电池向电机组g3供电,使用m8对应的电池向电机组g4供电,能够平衡电池组108中左旋翼电机m2、m4、m6和m8和右旋翼电机m1、m3、m5和m7对应的多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行,确保电动载人飞行器的飞行安全。
41.在某些实施方式中,动力装置10包括多个二极管,一个二极管的正极和负极分别连接一个电池和对应的一个电机组101,一个电机组101对应的多个二极管的负极相互连接。
42.具体地,二极管的正极连接对应的电池,二极管的负极连接对应的电机组101。例如,请再次参阅图1,第一二极管1051的正极连接第一电池1081,第一二极管1051的负极连接电机组101,第二二极管1052的正极连接第二电池1082,第二二极管1052的负极连接电机组101,以此类推。
43.本技术实施方式中,采用压降较小的二极管,利用二极管实现电路的单向导通,避免出现电池之间的充放电现象。举例而言,电池之间的充放电现象是指第一电池1081的电压较高而第二电池1082的电压较低的情况下,第一电池1081和第二电池1082之间可能会进行充放电。电池之间的充放电可能导致电池使用寿命减短、电池无法正常工作等后果。
44.因此,设置二极管的正极和负极分别连接一个电池和对应的一个电机组101,能够确保电池正常、稳定地运行。
45.在某些实施方式中,二极管为理想二极管。
46.具体地,理想二极管可以是指压降较小的二极管,利用理想二极管实现电路的单向导通,能够避免出现电池之间的充放电现象。例如,电池之间的充放电现象是指第一电池1081的电压较高而第二电池1082的电压较低的情况下,第一电池1081和第二电池1082之间可能会进行充放电。电池之间的充放电可能导致电池使用寿命减短、电池无法正常工作等后果。
47.如此,能够确保电池正常、稳定地运行。
48.在某些实施方式中,动力装置10包括电池动力模块111和与电池动力模块111连接的多个第一继电器1071,一个电池通过一个第一继电器1071连接对应的一个二极管。
49.具体地,第一继电器1071的一端连接电池,另一端连接二极管。在第一继电器1071闭合的情况下,电池与电调之间形成通路,电池通过第一继电器1071、二极管和电调向对应的电机1011供电。例如,第一电池1081通过第一继电器1071、二极管1051和第一电调1061向电机组101中的电机1011供电,第二电池1082通过第一继电器1071、二极管1052和第二电调1062向电机组101中的电机1011供电。在第一继电器1071断开的情况下,电池与电调之间形成开路,电池无法为电机供电。
50.此外,电池动力模块111与多个第一继电器1071并联,电池动力模块111用于驱动多个第一继电器闭合或断开,以此选择性地控制电池为电机1011供电。
51.如此,能够实现对第一继电器1071的单独控制。同时,在动力装置10的升级或调试过程中,可以通过选择性地闭合或断开某个第一继电器1071实现对动力装置10中某个零部件的控制,使得动力装置10的升级和维护过程更加简便。
52.请参阅图3,在某些实施方式中,动力装置10还包括备用电池组1010,备用电池组1010包括至少一个电池,备用电池组1010通过多个第二继电器2072分别连接对应的多个二极管。
53.具体地,在任一电池组108出现故障,无法为电机1011供电时,动力装置10可调用备用电池组1010为电机1011供电。备用电池组1010包括至少一个电池,备用电池组1010通过多个第二继电器1072分别连接对应的多个二极管。在第二继电器1072闭合的情况下,备用电池组1010与电调之间形成通路,备用电池组1010通过第二继电器1072、二极管、电调向对应的电机1011供电。例如,备用电池组1010通过第二继电器1072、二极管1051和第一电调1061向电机组101中的电机1011供电,通过第二继电器1072、二极管1052和第二电调1062向电机组101中的电机1011供电。在第二继电器1072断开的情况下,电池与电调之间形成开路,电池无法为电机供电。
54.如此,能够确保在电池组101发生故障的情况下,电机1011能够正常运行,确保电动载人飞行器的飞行安全。
55.此外,电池动力模块111与多个第二继电器1072并联,电池动力模块111用于驱动多个第二继电器1072闭合或断开,以此选择性地控制电池输出电源电压。
56.如此,能够实现对第二继电器1072的单独控制。同时,在动力装置10的升级或调试过程中,可以通过选择性地闭合或断开某个第二继电器1072实现对动力装置10中某个零部件的控制,使得动力装置10的升级和维护过程更加简便。
57.请参阅图4,在某些实施方式中,电池108还包括备用电池1089,备用电池1089通过多个第三继电器1073连接电池组108对应的多个二极管。
58.具体地,在电池组108中的第一电池和/或第二电池出现故障,无法为电机1011供电时,动力装置10可调用电池组108内的备用电池1089为电机1011供电。每一电池组108内均可设置一个备用电池1089。
59.备用电池1089通过多个第三继电器1073连接对应的多个二极管。在第三继电器1073闭合的情况下,备用电池1089与对应的电调之间形成通路,电池通过第三继电器1073、二极管、电调流向对应的电机。例如,备用电池1089通过第三继电器1073、二极管1051和第一电调1061向电机组101中的电机1011供电,通过第三继电器1073、二极管1052和第二电调1062向电机组101中的电机1011供电。在第三继电器1073断开的情况下,电池与电调之间形成开路,电池无法为电机供电。
60.如此,能够确保在电池组108发生故障的情况下,电机1011能够正常运行,确保电动载人飞行器的飞行安全。
61.在某些实施方式中,电池动力模块111包括电池检测单元(图未示出),电池检测单元与多个电池连接以检测电池的电压、电流和/或温度。
62.具体地,电池检测单元与多个电池连接,用于检测电池的电压、电流和/或温度,使得动力装置10根据电压、电流和/或温度等信息对其中的零部件进行相应的控制。
63.在一些实施例中,电池检测单元检查到某个电池的电压超出预定的电压阈值,或
者检测到某个电池的温度超出预定的温度阈值,或者检测到某个电池的电流超出预定的电流阈值,电池检测单元将检测到的电池的电压、温度、电流等信息发送至电动载人飞行器的电池管理单元,电池管理单元统计每一电池的电池信息,并根据当前的电池信息下发指令。
64.如此,能够通过检测电池信息控制动力装置10相应的零部件,对电池进行调节,避免电池出现过放或者过充等问题。
65.需要说明地,电池的电压阈值、电流阈值和温度阈值可以根据电池中电芯的特性,例如工作电压、工作电流、工作温度等参数确定,具体不做限定,例如电压阈值可以是80v、85v、90v、95v、100v、110v、118v等,温度阈值可以是55摄氏度、60摄氏度、65摄氏度、70摄氏度等。
66.本技术实施方式还提供了一种电动载人飞行器,包括多个旋翼和上述任一实施方式所述的动力装置10,一个电机连接一个旋翼以驱动旋翼工作。
67.在某些实施方式中,多个旋翼包括多个左旋翼和多个右旋翼,一个电机组101包括一个左旋翼电机和一个右旋翼电机,左旋翼电机连接对应的一个左旋翼,右旋翼电机连接对应的一个右旋翼。
68.在某些实施方式中,旋翼的数量为八个,动力装置包括四个电机组和四个电池组,每个电机组包括两个电机,每个电池组包括两个电池。
69.在某些实施方式中,电动载人飞行器包括座舱,多个旋翼位于座舱上方。
70.具体地,请参阅图5,电机组g1包括一个左旋翼电机m2和一个右旋翼电机m1,电机组g2包括一个左旋翼电机m4和一个右旋翼电机m3,电机组g3包括一个左旋翼电机m6和一个右旋翼电机m5,电机组g4包括一个左旋翼电机m8和一个右旋翼电机m7。左旋翼电机m2、m4、m6和m8连接对应的左旋翼,右旋翼电机m1、m3、m5和m7连接对应的右旋翼。
71.在一些实施例中,在电动载人飞行器较长时间保持向右飞行、或向右飞行的时长远大于向左飞行的时长的情况下,与左旋翼电机m2、m4、m6和m8对应的电池电量消耗较大,与右旋翼电机m1、m3、m5和m7对应的电池电量消耗较小。也即是说,m2对应的电池电压大于m1对应的电池电压,m4对应的电池电压大于m3对应的电池电压,m6对应的电池电压大于m5对应的电池电压,m8对应的电池电压大于m7对应的电池电压。
72.在电动载人飞行器中设置8个电机m1-m8,m1和m2组成电机组g1,m3和m4组成电机组g2,m5和m6组成电机组g3,m7和m8组成电机组g4。通过使用电压较高的电池向电池组供电,也即是使用m2对应的电池向g1供电,使用m4对应的电池向g2供电,使用m6对应的电池向g3供电,使用m8对应的电池向g4供电,能够平衡电池组108中左旋翼电机m2、m4、m6和m8和右旋翼电机m1、m3、m5和m7对应的多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行,确保电动载人飞行器的飞行安全。
73.可以理解地,在上述实施例中,使用m2对应的电池向g1供电的同时,m1对应的电池也可以继续向电机m1供电。本实施例以电动载人飞行器中设置有8组电机为例,但在实际使用中电机、电池、旋翼等零部件的数量不限于8组。
74.在某些实施方式中,多个旋翼包括多个前旋翼和多个后旋翼,一个电机组101包括一个前旋翼电机和一个后旋翼电机,前旋翼电机连接对应的一个前旋翼,后旋翼电机连接对应的一个后旋翼。
75.具体地,请参阅图3,电机组g1'包括一个前旋翼电机m1和一个后旋翼电机m2,电机
组g2'包括一个前旋翼电机m3'和一个后旋翼电机m4',电机组g3'包括一个前旋翼电机m5'和一个后旋翼电机m6',电机组g4'包括一个前旋翼电机m7'和一个后旋翼电机m8'。后旋翼电机m2'、m4'、m6'和m8'连接对应的后旋翼,前旋翼电机m1'、m3'、m5'和m7'连接对应的前旋翼。
76.在一些实施例中,在电动载人飞行器较长时间保持向后飞行、或向后飞行的时长远大于向前飞行的时长的情况下,与前旋翼电机m1'、m3'、m5'和m7'对应的电池电量消耗较大,与后旋翼电机m2'、m4'、m6'和m8'对应的电池电量消耗较小。也即是说,m2'对应的电池电压大于m1'对应的电池电压,m4'对应的电池电压大于m3'对应的电池电压,m6'对应的电池电压大于m5'对应的电池电压,m8'对应的电池电压大于m7'对应的电池电压。
77.在电动载人飞行器中设置8个电机m1'-m8',m1'和m2'组成电机组g1',m3'和m4'组成电机组g2',m5'和m6'组成电机组g3',m7'和m8'组成电机组g4'。通过使用m2'对应的电池向g1'供电,使用m4'对应的电池向g2'供电,使用m6'对应的电池向g3'供电,使用m8'对应的电池向g4'供电,能够平衡电池组108中前旋翼电机m1'、m3'、m5'和m7'和后旋翼电机m2'、m4'、m6'和m8'对应的多个电池的电量,使得多个电池的电压差保持相对稳定,确保电池正常、稳定地运行,确保电动载人飞行器的飞行安全。
78.可以理解地,在上述实施例中,使用m2'对应的电池向g1'供电的同时,m1'对应的电池也可以继续向电机m1'供电。本实施例以电动载人飞行器中设置有8组电机为例,但在实际使用中电机、电池、旋翼等零部件的数量不限于8组。
79.本技术实施方式还提供了一种计算机可读存储介质。一个或多个包含计算机可执行指令的非易失性计算机可读存储介质,当计算机可执行指令被一个或多个处理器执行时,使得处理器执行上述任一实施方式的充电控制方法。
80.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,程序可存储于一非易失性计算机可读存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)等。
81.以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。