1.本发明涉及无人机技术领域,尤其涉及一种监测巡检无人机。
背景技术:
2.无人机通常被设计为在指定的持续时间内保持空中飞行,现有技术中在对设置于野外的装置进行监测时,多采用无人机进行;
3.但是对于如高压线路等有多样延伸方向的装置,单一的无人机通常需要花费数倍的时间来对线路进行巡检,进而严重影响巡检效率。
技术实现要素:
4.本发明的目的在于提供一种监测巡检无人机,以有效提升对于多延伸方向的装置的检测效率。
5.为实现上述目的,本发明提供了一种监测巡检无人机,所述监测巡检无人机包括主机体和至少两个分离机体,至少两个所述分离机体均设置于所述主机体的外侧,且均与所述主机体卡接配合;
6.所述主机体则设有主旋翼、第一摄像结构和卡接支架,所述主旋翼设置于所述主机体的上侧,且与所述主机体配合,所述第一摄像结构设置于所述卡接支架的下侧,且与所述主机体电性连接,所述卡接支架设置于所述主机体的下侧,且与至少两个所述分离机体卡接。
7.利用所述主旋翼用以使得监测巡检无人机能进行飞行,所述第一摄像结构则在不需进分散巡检时,进行监测,所述卡接支架则配合所述分离机体,从而将所述分离机体卡接在所述主机体内,并根据需要将所述分离机体进行分离,从而在需要对较大范围的巡检时,能有效提高巡检效率。
8.其中,所述卡接支架具有至少两个型腔、设有电子元器件的容置壳体和与所述型腔数量一致的电磁块,所述型腔设置于所述容置壳体的内侧,所述型腔数量与所述分离机体一致,所述电磁块则一一对应设置于所述型腔的内侧,电子元器件设置于所述容置壳体的内侧,且电子元器件与所述第一摄像结构和所述分离机体电性连接。
9.利用所述型腔安置所述分离机体,所述容置壳体则配合所述电磁块,从而将所述分离机体在需要时,通过电磁原理卡接固定在所述型腔内,电子元器件则控制监测巡检无人机。
10.其中,所述主旋翼包括设有贯穿孔的桨叶、安装挡片、限制插销和旋转轴,所述桨叶通过所述安装挡片与所述旋转轴固定连接,所述限制插销则对称设置于所述安装挡片的两侧,且所述限制插销沿水平方向通过所述贯穿孔贯穿所述桨叶与所述安装挡片螺纹固定。
11.利用所述桨叶配合所述安装挡片,从而在所述桨叶因转动出现自由舞动的情况时,能通过所述限制插销与所述安装挡片的配合,使得所述桨叶的舞动幅度大幅降低,进而
有效减少所述主旋翼在工作过程中的磨损,进而有效降低长时间巡检过程中的无人机的使用成本。
12.其中,所述限制插销包括连接杆、设有缓冲垫圈的限制帽和固定座,所述固定座与所述安装挡片固定连接,所述连接杆则连接所述限制帽和所述固定座,所述连接杆贯穿所述桨叶,所述缓冲垫圈设置于所述限制帽与所述连接杆的连接处,所述缓冲垫圈套设于所述连接杆的外侧,且所述缓冲垫圈的外径大于所述贯穿孔的直径。
13.利用所述连接杆配合所述限制帽,从而使得所述桨叶在转动过程中的振动幅度得到限制,所述固定座则用以将所述限制插销与所述安装挡片固定,进而通过所述限制插销将所述桨叶的运动幅度进行限制,所述缓冲垫圈则在所述桨叶与所述缓冲垫圈的摩擦过程中,起到保护所述缓冲垫圈的作用,从而使得所述桨叶能提升使用寿命。
14.其中,每个所述分离机体均包括折叠旋翼、机架、第二摄像结构和保护结构,所述折叠旋翼设置于所述机架的内侧,且与所述机架转动连接,所述第二摄像结构则设置于所述机架的下侧,且与所述卡接支架电性连接,所述保护结构则设置于所述机架远离所述卡接支架的外边缘,所述机架则与所述卡接支架电磁吸附配合。
15.利用所述折叠旋翼来配合所述分离机体,从而使得每个所述分离机体在需要时可以进行单独的巡检工作,所述机架则用以安装各结构,所述第二摄像结构则在所述分离机体进行单独工作时进行拍摄,从而实现所述分离机体的巡检,所述保护结构则用以保护无人机。
16.其中,所述机架包括磁性块和契合架体,所述磁性块设置于所述契合架体与所述卡接支架抵接的一侧,所述契合架体则通过所述磁性块与所述卡接支架吸附配合。
17.利用所述磁性块与所述电磁块的配合,从而根据需要启动所述电磁块,即可完成所述分离机体与所述主机体的分离和安装,从而在需要进行较大范围的巡检时,可通过将所述分离机体与所述主机体分离,让所述分离机体进行单独的巡检,从而有效提升监测巡检无人机的效率。
18.本发明的一种监测巡检无人机,通过改进监测巡检无人机的结构,利用所述主机体与所述分离机体的配合,从而在需要进行多方向的巡检时,通过分离机体从而实现在相同时间内对更广泛的范围内的监测,从而有效降低巡检过程中的时间成本。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
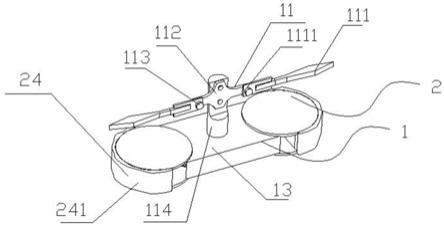
20.图1是本发明提供的一种监测巡检无人机的轴测结构示意图。
21.图2是本发明提供的一种监测巡检无人机的正视结构示意图。
22.图3是本发明提供的一种监测巡检无人机的分离机体的轴测结构示意图。
23.图4是本发明提供的一种监测巡检无人机的折叠旋翼的轴测结构示意图。
24.图5是本发明提供的一种监测巡检无人机的限制插销的轴测结构示意图。
25.1-主机体、2-分离机体、11-主旋翼、12-第一摄像结构、13-卡接支架、111-桨叶、
112-安装挡片、113-限制插销、114-旋转轴、1111-贯穿孔、1131-连接杆、1132-限制帽、1133-固定座、1134-缓冲垫圈、131-型腔、132-容置壳体、133-电磁块、21-折叠旋翼、22-机架、23-第二摄像结构、24-保护结构、211-折叠臂、212-连杆、213-驱动件、214-配合座、2111-辅旋翼、2112-连接臂体、2113-转轴、221-磁性块、222-契合架体、241-气囊、242-加速度感应器。
具体实施方式
26.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
27.在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
28.请参阅图1至图5,本发明提供一种监测巡检无人机,所述监测巡检无人机包括主机体1和至少两个分离机体2,至少两个所述分离机体2均设置于所述主机体1的外侧,且均与所述主机体1卡接配合;
29.所述主机体1则设有主旋翼11、第一摄像结构12和卡接支架13,所述主旋翼11设置于所述主机体1的上侧,且与所述主机体1配合,所述第一摄像结构12设置于所述卡接支架13的下侧,且与所述主机体1电性连接,所述卡接支架13设置于所述主机体1的下侧,且与至少两个所述分离机体2卡接。
30.在本实施方式中,所述主机体1与所述分离机体2的拆卸,从而实现让所述主机体1与所述分离机体2在需要时能拆卸,让所述分离机体2提升巡检效率,在不需要时又可安装,让监测巡检无人机整体进行巡检,实现不同使用情形下的使用需求,所述主旋翼11则用以带动整个监测巡检无人机飞行,所述第一摄像结构12则在不需拆分时进行拍摄,所述卡接支架13则陪所述分离机体2。
31.进一步的,所述卡接支架13具有至少两个型腔131、设有电子元器件的容置壳体132和与所述型腔131数量一致的电磁块133,所述型腔131设置于所述容置壳体132的内侧,所述型腔131数量与所述分离机体2一致,所述电磁块133则一一对应设置于所述型腔131的内侧,电子元器件设置于所述容置壳体132的内侧,且电子元器件与所述第一摄像结构12和所述分离机体2电性连接;
32.所述主旋翼11包括设有贯穿孔1111的桨叶111、安装挡片112、限制插销113和旋转轴114,所述桨叶111通过所述安装挡片112与所述旋转轴114固定连接,所述限制插销113则对称设置于所述安装挡片112的两侧,且所述限制插销113沿水平方向通过所述贯穿孔1111贯穿所述桨叶111与所述安装挡片112螺纹固定;
33.所述限制插销113包括连接杆1131、设有缓冲垫圈1134的限制帽1132和固定座1133,所述固定座1133与所述安装挡片112固定连接,所述连接杆1131则连接所述限制帽1132和所述固定座1133,所述连接杆1131贯穿所述桨叶111,所述缓冲垫圈1134设置于所述
限制帽1132与所述连接杆1131的连接处,所述缓冲垫圈1134套设于所述连接杆1131的外侧,且所述缓冲垫圈1134的外径大于所述贯穿孔1111的直径。
34.在本实施方式中,所述型腔131用以安装放置所述分离机体2,所述容置壳体132则用以保护各组件,所述电磁块133则用以配合所述分离机体2,从而使得所述分离机体2与所述主机体1的卡接固定,电子元器件则承担对整个无人机的控制,如飞行姿态、工作状态等控制,因其属于现有技术,本技术未对其做详细说明,附图也未画出,所述桨叶111通过所述贯穿孔1111与所述限制插销113配合,并被所述限制插销113固定在所述安装挡片112上,利用所述连接杆1131与所述限制帽1132的配合来限制所述桨叶111在工作状态下的移动,从而通过减少所述桨叶111在工作状态下的移动范围,以减少所述桨叶111在工作时的磨损,有效提升无人机的使用效率,所述旋转轴114则通过外接电机的方式驱使所述桨叶111旋转,所述缓冲垫圈1134则用以减少所述桨叶111与所述限制帽1132之间的硬接触,所述固定座1133则用以将所述限制插销113与所述安装挡片112实现固定。
35.进一步的,每个所述分离机体2均包括折叠旋翼21、机架22、第二摄像结构23和保护结构24,所述折叠旋翼21设置于所述机架22的内侧,且与所述机架22转动连接,所述第二摄像结构23则设置于所述机架22的下侧,且与所述卡接支架13电性连接,所述保护结构24则设置于所述机架22远离所述卡接支架13的外边缘,所述机架22则与所述卡接支架13电磁吸附配合;
36.所述机架22包括磁性块221和契合架体222,所述磁性块221设置于所述契合架体222与所述卡接支架13抵接的一侧,所述契合架体222则通过所述磁性块221与所述卡接支架13吸附配合。
37.在本实施方式中,所述折叠旋翼21配合所述机架22,不使用时,所述折叠旋翼21收束在所述机架22内,使用时则通过变形实现对所述分离机体2的驱动,所述第二摄像结构23则用以实现所述分离机体2在巡检过程中的画面的录制,所述保护结构24则用以保护所述分离机体2,所述磁性块221配合所述电磁块133,所述契合架体222设有加重块,以提升所述分离机体2的整个平衡性。
38.进一步的,所述折叠旋翼21包括对称设置的折叠臂211、两组连杆212、驱动件213和配合座214,所述驱动件213设置于所述契合架体222的内侧,且所述驱动件213的输出端与两组连杆212配合,两组所述连杆212分别与对称设置的所述折叠臂211配合,且两组所述连杆212均能驱使所述折叠臂211相对所述契合架体222转动,所述配合座214则与所述折叠臂211转动连接,且与所述驱动件213的输出端配合;
39.所述折叠臂211均包括辅旋翼2111、连接臂体2112和转轴2113,所述转轴2113连接所述连接臂体2112和所述配合座214,所述辅旋翼2111设置于所述连接臂体2112的末端,所述连接臂体2112则通过所述转轴2113与所述配合座214转动连接;
40.所述保护结构24包括气囊241和加速度感应器242,所述气囊241设置于所述机架22的外侧,所述加速度感应器242则设置于所述契合架体222的下侧。
41.在本实施方式中,所述折叠臂211通过所述驱动件213带动所述配合座214移动,并在所述连杆212的作用下实现收束或张开,所述辅旋翼2111则带动所述分离机体2飞行,所述连接臂体2112配合所述转轴2113,从而实现所述折叠臂211的张开或关闭,所述气囊241在所述加速度感应器242感应到飞机的加速度出现非正常变动时,即会启动所述气囊241吸
收空气,进而尽量避免所述分离机体2因意外出现损坏。
42.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。