1.本实用新型涉及无人机设备领域,尤其涉及兼容不同吊装测绘设备的无人机脚架。
背景技术:
2.无人机顾名思义,是一种无人驾驶的具有一定自主飞行控制能力的飞行装置,无人机一般意义上分为两种形式,一种是固定翼无人机,固定翼无人机的布局更接近大众所熟悉的飞机外形,二是多旋翼无人机,多旋翼无人机大众可以购买到消费级和专业级摄影测绘机型,多旋翼无人机相对固定翼无人机来说更加普及,多旋翼无人机相对固定翼无人机来说,其缺点是飞行的航程和航时更短、飞行的速度和高度更低以及载重量非常有限,但是多旋翼无人机能够定点悬停,且能够以向任意方向飞行,操纵十分灵活,非常适合进行三维建模测绘和航拍等操作。
3.现有的多旋翼无人机脚架多采用t型结构,即一根主支撑管与机身蜗杆机括连接(机脚的电动升降操控装置),主支撑管的底端通过卡件垂直连接一根横向的副支撑管,构成一个t型,机身两侧一边一组,将机身高高撑起以容纳底部的测绘挂载设备,但是该种机脚之间的空间呈梯台型,能够容纳的设备尺寸十分有限,对于一些特殊的跨度范围较大的设备,甚至需要将机脚拆除再能够进行安装,因此限制了多旋翼无人机的挂载能力,为了解决上述问题,我们提出了一种兼容不同吊装测绘设备的无人机脚架。
技术实现要素:
4.本实用新型提出的兼容不同吊装测绘设备的无人机脚架,解决了现有的多旋翼无人机机脚对挂载设备产生空间干涉的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.兼容不同吊装测绘设备的无人机脚架,包括第一连杆,所述第一连杆的一端匹配设置有第二连杆,且所述第二连杆远离第一连杆的一端匹配设置有第二转接环,所述第二转接环远离第二连杆的一端匹配套接有三通,且所述三通内匹配套接有第三连杆,所述第一连杆内开设有第一腔体,且所述第一连杆的内周壁设置有安装座,且所述第一连杆位于第一腔体内匹配设置有蜗杆结构,所述蜗杆结构包括电机、外壳、丝杆和滑块,且所述第一连杆和第二连杆之间匹配设置有操纵杆。
7.优选的,所述第一连杆远离第二连杆的一端设置有第一转接环,且所述第一转接环的末端沿其轴向开设有圆槽,所述第三连杆与第二连杆呈互相垂直状。
8.优选的,所述第一连杆和第二连杆之间匹配设置有铰链和防尘套,且所述铰链套接于防尘套内。
9.优选的,所述电机与安装座呈套接,且所述外壳与电机的壳体呈固定连接,所述外壳内沿其长度方向开设有第二腔体,且所述第二腔体内设置有丝杆,所述丝杆的一端与电机的输出轴呈固定连接,且所述丝杆的另一端与外壳呈转动连接,所述滑块与丝杆呈螺纹
套接。
10.优选的,所述外壳的底端沿其长度方向开设有滑槽,且所述滑块贯穿于外壳,所述滑块与滑槽呈滑动连接。
11.优选的,所述操纵杆与第一连杆呈滑动连接,且所述操纵杆的一端与滑块的底端呈铰接,所述操纵杆的另一端与第二连杆底端呈铰接。
12.本实用新型的有益效果为:
13.1、当无人机停止在地面时,该装置的状态如图2所示,呈现出一种类似于节肢动物的仿生弯折形态,使得机脚之间的可用空间有效增加。
14.2、该装置利用无人机自带的蜗杆结构将第一连杆升起至水平状,再通过第一连杆内部的电机、丝杆和滑块驱动操纵杆推动第二连杆向上偏转至水平状,此时该装置完全收起,对测绘装置不会产生任何遮挡,满足无人机的飞行和测绘要求,且充分利用了原机设备,简化了安装和操控结构,节约了改装成本。
15.综上所述,该装置的仿生外形结构具有良好的作业空间,且有效的解决了现有的多旋翼无人机机脚对挂载设备产生空间干涉的问题。
附图说明
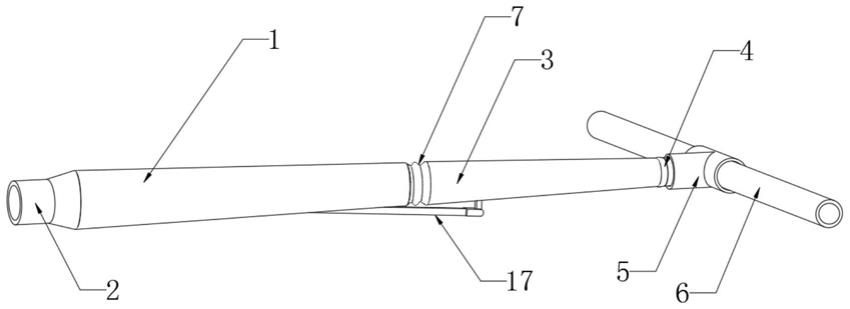
16.图1为本实用新型的外观结构示意图。
17.图2为本实用新型的弯折状态的结构剖视图。
18.图3为本实用新型的电机、丝杆和滑块之间的装配结构放大图。
19.图中标号:1、第一连杆;2、第一转接环;3、第二连杆;4、第二转接环;5、三通;6、第三连杆;7、防尘套;8、圆槽;9、第一腔体;10、安装座;11、电机;12、外壳;13、第二腔体;14、滑槽;15、丝杆;16、滑块;17、操纵杆;18、铰链。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.参照图1-图3,兼容不同吊装测绘设备的无人机脚架,包括第一连杆1,所述第一连杆1的一端匹配设置有第二连杆3,且所述第二连杆3远离第一连杆1的一端匹配设置有第二转接环4,所述第二转接环4远离第二连杆3的一端匹配套接有三通5,且所述三通5内匹配套接有第三连杆6,所述第一连杆1内开设有第一腔体9,且所述第一连杆1的内周壁设置有安装座10,且所述第一连杆1位于第一腔体9内匹配设置有蜗杆结构,所述蜗杆结构包括电机11、外壳12、丝杆15和滑块16,且所述第一连杆1和第二连杆3之间匹配设置有操纵杆17,所述第一连杆1远离第二连杆3的一端设置有第一转接环2,且所述第一转接环2的末端沿其轴向开设有圆槽8,所述第三连杆6与第二连杆3呈互相垂直状,所述第一连杆1和第二连杆3之间匹配设置有铰链18和防尘套7,且所述铰链18套接于防尘套7内,所述电机11与安装座10呈套接,且所述外壳12与电机11的壳体呈固定连接,所述外壳12内沿其长度方向开设有第二腔体13,且所述第二腔体13内设置有丝杆15,所述丝杆15的一端与电机11的输出轴呈固定连接,且所述丝杆15的另一端与外壳12呈转动连接,所述滑块16与丝杆15呈螺纹套接,所
述外壳12的底端沿其长度方向开设有滑槽14,且所述滑块16贯穿于外壳12,所述滑块16与滑槽14呈滑动连接,所述操纵杆17与第一连杆1呈滑动连接,且所述操纵杆17的一端与滑块16的底端呈铰接,所述操纵杆17的另一端与第二连杆3底端呈铰接。
22.工作原理:该装置是一种在现有t型折叠无人机起落架基础上进行改进的无人机机脚,该装置的整体外管仍保留t型,可通过第一转接环2与原有的蜗杆机构连接,无需对无人机机身本体进行改动,当无人机停止在地面时,该装置的状态如图2所示,呈现出一种类似于节肢动物的仿生弯折形态,使得机脚之间的可用空间有效增加;
23.该装置的工作流程为,当无人机携带挂载起飞后,先通过无人机内部自带的蜗杆结构通过第一转接环2将该装置向上偏转,直至第一连杆1呈水平状,再通过第一连杆1内部的电机11带动丝杆15旋转,驱动滑块16沿滑槽14移动,移动的滑块16通过操纵杆17推动第二连杆3以铰链18为轴心向上偏转,直至第二连杆3(包括三通5和第三连杆6)呈水平状,此时该装置完全收起,对测绘装置不会产生任何遮挡,满足无人机的飞行和测绘要求,降落时,按上述的流程的反方向动作即可放下该装置进行着陆。
24.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。