用于土方设备和操作的监测工具、系统和方法
1.相关申请
2.本技术要求2019年5月14日提交的第62/847,842号美国临时专利申请的优先权的权益,所述美国临时专利申请的全部内容以引用的方式并入。
技术领域
3.本公开涉及一种用于监测土方操作的监测工具、系统和过程。
背景技术:
4.挖掘机和铲斗的多个配置是已知的,并且两者都存在变化。图1a
‑
1b示出了土方设备的两个实例。图1a示出了配备有臂架2、操纵杆20和用于收集土料24的铲斗3的挖掘机。图1b示出了配备有具有用以释放土料24a的铰链门10a的铲斗3a的电缆铲。参考图2,铲斗3包含限定空腔16的壳4,所述空腔用于在挖掘操作期间收集材料。壳4包含具有用以将铲斗3附接到土方设备1的支撑件8的后壁12,以及位于后壁12的各侧的一对相对侧壁14。铲斗3具有限定铲斗3的挖掘缘34的唇缘5。斗齿7和/或护罩9通常固定到挖掘缘34以保护所述缘34、使唇缘5前面的地面破碎和/或将材料收集到铲斗3中。例如美国专利9,222,243中所公开的多个斗齿7和护罩9可以附接到铲斗3的唇缘5。
5.参考图3
‑
4,每个斗齿7包含焊接到唇缘5的接合器11、安装在接合器11上的中间接合器13和安装在中间接合器13上的尖端(也称为尖顶)15。尖端15包含用以接收中间接合器13的鼻部17的向后开口的空腔18,以及用以穿透地面的前端部19。中间接合器13包含用以接收接合器11的鼻部23的向后开口的空腔22。锁21用于将尖端15固定到中间接合器13并且将中间接合器13固定到接合器11(图4)。其它斗齿布置也是可能的,例如美国专利7,882,649中所公开的。
6.在此实例中,尖端15通常会磨损且需要多次更换。中间接合器13可以被称作此磨损零件的基部。然而,中间接合器13也可以被称作磨损零件。同样,虽然接合器11是中间接合器13的基部,但接合器11也可以被视为磨损时可以更换的磨损零件。当此类磨损零件达到推荐的最小磨损轮廓(例如,磨损构件被视为完全磨损)时,产品会被更换,以便开采量不会减少并且其上安装有磨损零件的基部不会经历不必要的磨损。
7.在使用期间,此类接合地面用产品可能会遇到负载重和磨损高的状况。这些状况可能会导致产品磨损或与土方设备分离。例如,当铲斗接合地面时,例如尖端或中间接合器的磨损零件可以与挖掘缘分离。土方设备的操作员可能无法总能看到此类产品何时已与铲斗分离。继续操作接合地面用产品(例如,尖端)缺失的土方设备可能会导致开采量减少和/或唇缘、铲斗壁或土方设备上的其它组件过度磨损。还已知的是,在采矿环境中丢失的磨损零件可能会对下游设备(例如,破碎机)造成损坏,进而例如可能会导致设备的计划外停机和开采量损失。如果磨损零件卡在破碎机中,则所述磨损零件可能会弹出并给工人带来危险,或者所述磨损零件可能会卡住且需要操作员移开零件,这有时可能是困难、耗时和/或危险的过程。斗齿和/或护罩的过度磨损还可能会导致设备效率和开采量减少、燃料消耗的
成本增大等。
8.存在已用于监测磨损零件以便确定磨损零件何时需要更换和/或何时已丢失的现有系统,并且取得了不同程度的成功。例如,motion metrics售卖的系统使用安装在挖掘设备上的光学相机来确定磨损零件的磨损量和磨损零件何时丢失。然而,用于监测地面接合用产品的当前系统由于环境、有限的观察能力等因素而未能始终提供令人满意的结果。
技术实现要素:
9.本公开涉及用于监测土方设备、磨损零件、操作和/或例如在采矿和施工中发现的土料的一种监测工具、系统和/或方法。
10.在一个实例中,一种监测工具包含无人驾驶载具和缆。所述载具包含电子装置,以监测关于土方操作的至少一个特性且传输关于所述至少一个特性的信息。所述缆将所述无人驾驶载具连接到基站装置(home device)。
11.在另一实例中,一种监测工具包含:基站装置;具有电子装置的无人驾驶载具,其用以监测关于土方操作的至少一个特性且传输关于所述至少一个特性的信息;以及缆,其将所述无人驾驶载具连接到所述基站装置。
12.在另一实例中,一种监测系统包含至少一个土方设备和监测工具。所述监测工具包含:基站装置;具有电子装置的无人驾驶载具,其用以监测关于土方操作的至少一个特性且传输关于所述至少一个特性的信息;以及缆,其将所述无人驾驶载具连接到所述基站装置。
13.在上述实例中的任一者中,所述缆可以任选地提供电力和/或数据传输。所述无人驾驶载具可以是远程控制或自主的,或其一些组合。所述无人驾驶载具可以是空中和/或地面载具。
14.在另一实例中,所述无人驾驶载具连接到基站装置。所述基站装置可以是独立装置、固定到运输载具、土方设备和/或其它结构,或者可以是载具、设备等。所述无人驾驶载具通过缆连接到所述基站装置,以进行固定、供电,和/或将数据传输到所述无人驾驶载具和/或从所述无人驾驶载具传输数据。所述基站装置可以包含电源,以向所述监测工具提供电力的。所述基站装置可以包含收发器,以将数据接收和发送到远程装置和/或从远程装置接收和发送数据。所述基站装置还可以包含处理器,以基于从所述监测工具接收到的信息作出确定。
15.各种上述实施方案和实例可以结合或独立地使用。为了更好地理解本公开的优点和特征,可以参考以下描述事项和附图,其描述并示出与本公开有关的各种配置和概念。
附图说明
16.图1a是土方机器的侧视图。
17.图1b是另一土方机器的侧视图。
18.图2是具有斗齿和护罩的铲斗的透视图。
19.图3是在图2中示出的斗齿中的一者的透视图。
20.图4是在图3中示出的斗齿中的一者的分解透视图。
21.图5示出了根据本公开的监测系统的第一实例。
22.图6示出了根据本公开的监测系统的第二实例。
23.图7示出了根据本公开的监测系统的第三实例。
24.图8示出了根据本公开的监测系统的第四实例。
25.图9是根据本公开的与监测系统一起使用的具有人机界面(hmi)的示例移动手持式装置的前视图。
26.图10示出了根据本公开的监测系统的第五实例。
具体实施方式
27.本公开涉及用于监测土方操作的至少一个特性的一种监测工具、系统和/或过程。
28.在一个实施例中,监测工具包含具有传感器的系缆载具。所述缆可以为监测工具提供电力和/或数据传输。所述缆还可以提高监测工具的安全性。监测工具可以用于监测一个或多个土方操作的至少一个特性,包含例如监测土方设备(包含其用途、性能、组件、磨损零件等)和/或与土方操作相关联的土料。监测工具、系统和/或过程可以包含如针对2016年2月12日提交的第2016/0237640号美国公开案中的监测工具、系统和/或过程所公开的任何或所有特征、能力、实施例和/或操作,所述美国公开案以全文引用的方式并入本文中。
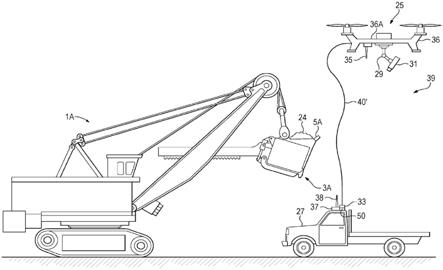
29.参考图5,示出了根据一个实例的监测系统39。在此实例中,监测系统39包含土方设备1a和监测工具25,所述土方设备呈电缆铲形式、具有呈铲斗形式的地面接合用产品3a,所述地面接合用产品具有呈斗齿和护罩形式的地面接合用磨损零件5a。监测工具25可以监测土方操作的至少一个特性,其实例可以包含土方设备、其组件(例如,其臂架、操纵杆、滑轮等)、其相关联的磨损零件(例如,斗齿、护罩、履带板等)、其它相关设备(例如,拖运卡车)和/或被收集到铲斗3a中之前、期间和/或之后的土料的状况、用途和/或性能。
30.监测工具25可以包含无人驾驶载具36、由无人驾驶载具支撑的传感器或电子装置31,以及将无人驾驶载具连接到基站装置33的缆40。在所示的实例中,无人驾驶载具36是无人驾驶飞行器(uav)36a,但也可以使用陆上载具。系缆uav 36a可以呈例如无人机、直升机、软式飞艇、飞机或其它飞行器的形式,并且包含至少一个传感器31。作为一个实例,电子装置31可以是表面特性化装置,例如相机或创建例如设备1a、其组件、磨损零件5a、所收集材料、待挖掘的土料、相关联设备等的至少一部分的二维或三维表示(例如,点云)或其它表示的其它装置。使用系缆uav 36a来监测设备、用途、磨损零件等具有某些优点,即,空中监测工具25可以例如提供独特的有利点和/或实际上在操作中的任何点处进行读数,而不会抑制操作、要求设备或其它被监测项处于特定位置和/或定向中和/或危及人员。无人驾驶载具36准许传感器31紧密接近感兴趣区域(例如,设备的组件、固定到设备的磨损零件、待挖掘的土堰(earthen bank)等),以便安全且可靠地收集信息。系缆uav 36a经由缆40连接到基站装置33。
31.使用缆40可以提高监测操作的安全性,使得uav 36a只能在缆的长度限定的距基站装置33的有限空间半径内飞行。例如,缆40限制了uav 36a的潜在飞行空间,以提供防止uav 36a飞入不希望空间(例如,飞入土方设备、矿场的其它部分等)的安全性水平。使用固定到无人驾驶载具的缆40还可以降低偷窃的风险。缆40可以由各种材料构成,只要它们能够为预期操作提供足够的强度、柔韧性和/或耐久性即可。缆优选地是轻型、柔性和薄的,以使由于天气条件(例如,大风)作用于缆而可能产生的阻力和/或干扰最小化。这允许系缆的
无人驾驶载具36在更不利的环境中起作用。缆40可以具有绞盘系统,以易于拉出和缩回无人驾驶载具36。绞盘系统可以被偏置以自动除去缆的不需要长度,从而避免被暴露和卡住或缠在附近的物体上。绞盘系统还可以通过提供可调整的缆长度以适应不同的需求且由此提供距基站装置33的可调整(例如,减小的)飞行空间来提高安全性;这可以降低潜在用户错误和碰撞的风险,是因为系缆无人机可以飞行的空间半径或区域有限。
32.在另一实例中,缆40可以包含用以为无人驾驶载具36、传感器和/或载具上的其它组件供电的导电线。缆40可以将电力从与基站装置33相关联的电源或供应源50传递到系缆的无人驾驶载具36,以延长uav 36a可以悬浮的时间和/或增加传感器或无人驾驶载具上其它组件的数目、种类或功能。电源50可以例如包含一个或多个电池、发生器或其它电力源和/或从基站装置33到另一电源(例如,土方设备、运输载具、插座等)的连接。仅作为实例,电源50可以例如将交流(ac)电力转换成直流(dc)电力,并且系缆的无人驾驶载具36可以包含用以向传感器31和其它组件供应较低电压电力的dc
‑
dc转换器。在某些实施例中,通过缆40的电力可以允许几乎无限的飞行或工作时间,而非受到无人机的电池容量的限制。增强的电力还可以用于运行由系缆的无人驾驶载具36携带的一个或多个传感器和/或用于为处理器、灯等其它组件供电。代替通过缆的电力或作为对通过缆的电力的补充,传感器31和/或系缆uav 36a可以包含电池电力,这可以例如允许在缆不传输电力时和/或在特定位置处电源不可用的情况下进行故障保护操作。
33.在另一实例中,缆40可以包含电线、光纤或其它通信传输管道,以允许系缆的无人驾驶载具36将信号传递到基站装置33和/或从所述基站装置传递信号。此类信号可以包含例如传感器数据、软件和/或用于系缆的无人驾驶载具36的操作指令。缆40可以作为独立网络(例如,仅基站装置33和系缆的无人驾驶载具36)而存在,或者可以是较大网络(例如,网络142)的一部分。缆40可以任选地被加密以用于基站装置33,从而允许更安全的信息传送。在数据通过缆40传送的实施例中,与无线信号相比,数据传输可以更快、更可靠和/或更好地防止未授权接收。无人驾驶载具36可以任选地包含无线传输器35作为通过缆40进行传输时的补充或备份,或当与缺乏数据传输的缆一起使用时和/或当现场不能获得用于缆的接收器时任选地包含所述无线传输器。
34.基站装置33可以由维修卡车或其它载具27(图5)、土方设备1(图6)或工地上的其它结构、设备或装置携带和/或紧固到其上,或者作为维修卡车或其它载具、土方设备或工地上的其它结构、设备或装置中的一者。基站装置33可以是由载具、设备或其它结构携带或连接(或可连接)到载具、设备或其它结构的离散装置,和/或可以是可放置在工地的合适位置处的独立装置。例如,基站装置33、缆40和无人驾驶载具36可以是离散的监测工具25,其由维修卡车携带到矿场或其它工地的一个或多个位置。作为另一实例,监测工具25可以由维修卡车运输,并且留在矿场或其它工地的特定位置。作为另一实例,一个或多个监测工具25可以联接到工地的设备和/或由工地的设备携带,所述设备例如挖掘设备、拖运卡车、破碎机和/或其它矿物处理设备、输送设备、滑槽等。在另一实例中,无人驾驶载具36可以在不需要单独的运输载具27的情况下飞到用于监测(例如,土方设备)的位置,并且在该处连接到固定到基站装置33的缆40;在一些情况下,无人驾驶载具36可以携带缆40以用于固定到基站装置33。作为另一实例,基站装置33可以是自主或远程控制的载具。基站装置33用作无人驾驶载具36的基部,并且任选地能够充当电源、传输器/接收器、基部/毂、锚固件、着陆
点、车库、载具、连接器等。基站装置33还可以包含用于处理借助于缆40或其它手段从系缆的无人驾驶载具36接收到的数据的处理器199。
35.有许多现成的uav可以用作或改装为用作本公开的无人驾驶载具;无人驾驶载具也可以是定制的。例如,系缆uav 36a可能需要操作员借助于例如操纵杆来操纵系缆uav 36a。uav 36a可以是自主的或由操作员控制和通过编程以用于飞行、起飞和/或着陆的组合。另外,系缆uav 36a可以自动地悬停在土方设备1a上方的适当位置;悬停位置可以由操作员确定,通过使用信标37a、传感器31和/或其它手段自动地确定,和/或通过其它合适的操作确定。在另一实例中,监测工具可以通过例如程序、传感器、信标等操纵以持续地、周期性地、循环地和/或以其它方式监测土方操作的至少一个特性,例如监测土方设备、其组件、磨损零件等和/或土料的用途、状况和/或性能。在另一实例中,系缆uav 36a可能不需要操作员来进行起飞或着陆,并且可以在着陆之前按设定模式飞行。系缆uav 36a可以协调和/或被控制,以便不落在与系缆uav 36a起飞的相同地点或位置。
36.参考图7,监测工具25b可以包含基于地面的无人驾驶载具36b,例如用于操纵至少一个电子装置或传感器31b的系缆的基于地面的机器人。本文中关于空中无人驾驶载具(例如,关于安全性、电源和通信传输)所论述的益处还将适用于基于地面无人驾驶载具36b。并且,上文针对空中无人驾驶载具所论述的变化将适用于基于地面的无人驾驶载具,但应理解对飞行空间等的提及将由驱动空间等代替。在所示的实例中,运输载具27携带监测工具25b以用于初始运输到希望位置,此时,所述监测工具可以任选地被卸载以进行操作(如图7中)。或者,所述监测工具可以保留在运输载具上以进行某些操作。在所示实施例中,基于地面的机器人36b连接到固定到运输载具27的基站装置33。基于地面的无人驾驶载具36b能够操纵电子装置31b,以便其可以监测土方操作的至少一个特性,例如铲斗3a上的产品5a。替代地,基于地面的无人驾驶载具36b能够在没有运输载具27的情况下运输自身。基于地面的无人驾驶载具可以包含许多变化,例如不同的移动配置(例如,轮、履带等)、用以满足需要(例如,小到足以现有设备上运行、大到足以观察某些设备和/或零件等)的各种大小、自主供电或由其它载具或设备供电,包含一个或多个传感器、传输器、处理器等。与空中监测工具一样,缆40b可以提供电源和/或到无人驾驶载具36b的通信传输。
37.参考图8,示出了根据本公开的一个实例的监测系统139。系统139可以包含具有地面接合用产品103b的土方设备101b、通信网络142、监测工具125、运输载具127、处理器199、数据库194和/或手持式装置128;其它替代方案和/或变化也是可能的。土方设备101b包含具有唇缘105b并携带负载124b的铲斗103b。斗齿和/或其它地面接合用工具(get)固定到唇缘;尖顶115b在图8中示出为示例磨损零件。尖顶115b可以任选地包含例如美国案10,011,974中所公开的传感器138和天线135,所述美国案以全文引用的方式并入本文中。铲斗103b、设备101b、get 115b、运输载具127和/或无人驾驶载具136可以各自任选地包含天线135、信标137a
‑
d和/或用于传送信息、提供位置信息等的一些组合。作为一个实例,信标可以由监测工具25使用以标识设备的位置、方位和/或定向等,以供无人驾驶载具136和/或传感器131行进到和/或将所述无人驾驶载具和/或所述传感器定位到其中以进行监测,和/或所述信标可以由监测工具用作用于避免与现有(固定的或移动的)设备等的意外碰撞的系统。作为一个实例,基站装置33还可以包含与无人驾驶载具36上的传感器包无关的传感器包。如果无人驾驶载具36经由安装在其上的基站装置33已知主机设备的航向(指南针)、方
位或方向加速度,则无人驾驶载具26或其机载传感器包的“目标”的移动可以与主机设备的移动协调。
38.土方设备101b、运输载具127、监测工具125、地面接合用产品115b(例如,铲斗和磨损构件)、处理器和/或手持式装置128(或其它hmi)可以各自通过通信网络142或各种装置之间的独立网络通信。例如,通信网络142可以包含内联网、互联网、因特网、局域网、广域网(wan)、采矿站点网络、无线网络(例如,wap)、安全定制连接、有线网络、虚拟网络、软件定义网络、数据中心总线和背板,或任何其它类型的网络、网络组合或其变体。通信网络142表示任何网络或(物理或虚拟)网络的集合并且可以包含各种元件,例如开关、路由器、光纤、接线、无线和用以连接系统139的各种元件的布线。系统139组件与其它计算系统之间的通信可以根据各种通信协议、协议的组合或其变体在通信网络142、缆140或其它网络上发生。应了解,网络142仅是根据本发明技术的实施例的多个可能配置的示例性表示。在其它实例中,系统139的各种组件可以是实际上位于一处的,和/或可以是地理上分布式的。
39.监测系统139可以包含处理器199(具有例如非暂时性存储器200等),所述处理器在其上写入有计算机指令、程序、软件、固件等;所有此类装置在本文中都将被称为处理器。在所示的实例中(图8),处理器199远离监测工具125(例如,位于办公室或其它远程位置中)。然而,一个或多个处理器可以具备监测工具125(无人驾驶载具136和/或基站装置133)、土方设备101b、手持式装置128、装置137a
‑
d和/或其它远程位置。处理器199可以具备来自一个或多个传感器131、(例如,get中的)其它传感器、手持式装置128、云数据库194、其它数据源和/或其它远程装置等的数据,以提供信息和分析。如本文中所使用的术语处理器199可包含系统的分开和/或同时操作的一个或多个处理器。在一个实施方案中,处理器199可以任选地包含土方设备101b的发动机控制器单元(ecu)。ecu 199可以从处理器199提供或接收信息,和/或可以将信息直接提供到传感器131或从所述传感器直接接收信息。ecu 199可以提供关于但不限于发动机扭矩、燃料消耗、气温、发动机温度等的数据。ecu 199数据可以与传感器数据和/或来自其它源的数据耦合,并且供处理器199处理以提供各种输出。在一个实例中,处理器199可以简单地借助于通信装置135促进监测工具125与各种系统组件之间通过网络142和/或缆140的通信。系统组件中的每一个可以包含单独的处理器199或(分布式或以其它方式布置的)单个处理器199可以控制系统139的各种组件中的每一个。在一个实例中,计算机系统198的各种组件可以是实际上位于一处的,和/或可以是地理上分布式的。如本领域的技术人员应了解的,根据本发明技术的实施例的其它示例性计算机系统198可以包含与本文中所示出和描述的那些不同的组件。
40.监测工具125和/或监测系统139可以用于监测土方操作的各种特性,其涉及例如设备、产物、用途、性能、土料等。例如,监测工具125可以监测(和/或处理器确定)土方设备和/或所述设备的部分的状况、用途和/或性能,所述土方设备例如挖掘机、拖运卡车、挖掘设备、输送设备、滑槽、破碎机、矿物处理设备,所述部分例如唇缘、铲斗、造模板、操纵杆、臂架、底盘、动力系统、卡车托盘、v形送料斗和其它组件。监测工具125和/或系统139可以例如监测(和/或确定)与土方设备相关联的磨损零件的存在、状况、用途和/或存在,所述磨损零件例如尖端15、中间接合器13、接合器11、浇筑唇缘的鼻部15、护罩9、滑槽、尖状物、链轨板、叶片、角板(corner shoe)、锤和/或其它磨损零件。监测工具125和/或系统139可以例如监测(和/或确定)设备的用途和/或性能,例如铲斗、卡车托盘、v形送料斗等内的负载,某些操
作的速度——例如挖掘周期、装载时间、输送时间、矿物处理设备的吞吐量等,挖掘周期的次数等。监测工具125和/或系统139可以例如监测(和/或确定)被土方设备收集、处理之前、期间和/或之后的土料,例如矿石浓度、碎裂情况、坡度角、挖掘路径等。监测工具和/或系统还可以例如监测土方操作的其它特性,例如零件标识、操作限制、设备故障、设备接近度违规、定位系统传感器、读取仪表以及矿场或其它工地内的其它操作,在所述操作中,可以通过使用具有传感器的系缆的无人驾驶载具来提高安全性、有效性和/或效率。
41.在另一实例中,监测工具125可以用于生成可用于测绘矿场或其它土方地点的数据,以估计在所述地点使用的土方设备上的地面接合用产品的特性。例如,所收集数据可以用于生成地面接合用产品的磨损率的轮廓式映射,以更好地例如确定产品更换计划、成本等。在一个实例中,通过监测工具125收集的数据可以与例如矿场地质、gps数据、破碎情况等其它数据组合,以作出此类确定。所述数据可以用于映射其它特性或以除映射以外的方式来处理地点数据,以生成类似信息。作为其它实例,所述系统可以用于确定例如用于挖掘某些材料的预订计划、产品的替换计划、操作员的表现等。
42.监测工具125和/或监测系统139可以监测和/或确定一个或多个特性,所述一个或多个特性可以包含与土方设备(包含组件、磨损零件等)、操作限制、定位系统传感器、用途、性能、状况等有关的信息。与操作限制有关的信息可以包含例如过度装料设备、过度应力设备等。与设备故障有关的信息可以包含针对最大磨损设定的预定值(例如,用于特定地面接合用产品的磨损轮廓)。与定位系统传感器有关的信息可以包含定位系统传感器,例如信标、磨损传感器、爆炸监测传感器、道路状况传感器、材料监测传感器、流量监测传感器、装料传感器、位置传感器等。与零件标识有关的信息可以包含例如产品类型、产品编号、客户编号、品牌名称、商标、物料清单、维护说明、使用说明等。与用途有关的信息可以包含例如与产品相关联的土方设备的类型、挖掘周期的数目、挖掘周期的平均时间、产品在设备上的位置等。与产品状况有关的信息可以包含例如磨损、损坏、温度、压力等。与性能有关的信息可以包含例如挖掘速率、每次磨损增加量所移动的吨数、装料速率、一段时间内的吞吐量等。例如,吞吐量可以包含例如:一段时间内铲斗收集了多少材料、一段时间内有多少材料被装载到了拖运卡车车身中(可以任选地包含测量转移过程中的材料损失)、一段时间内有多少材料通过了破碎机或其它矿物处理设备、一段时间内有多少材料通过了滑槽或位于传送带上等。作为另一实例,系缆uav可以发现为与第二件土方移动设备的操作作准备的第一件土方移动设备。例如,为通过铲进行装载作准备的拖运卡车。可以测量与性能有关的信息,例如准备进行装载的时间。此信息还可以用于将系缆uav 136a协调到特定位置以便更好地观察。使用监测工具125和尤其空中无人驾驶载具136——例如系缆uav 136a——可以通过以下方式变得有利:准许对超过一个土方设备上的产品进行协调和有效的监测,例如同时监测例如以下各项的特性:例如土堰、铲斗的状况和/或负载、铲斗上的磨损零件的存在和/或状况、卡车车身的负载和/或状况等。
43.监测工具125可以包含各种传感器。作为一个实例,电子装置131可以生成表示被监测产品的至少一部分的外表面的二维或三维点云。然而,可以使用各种其它电子装置(例如,相机、lidar等),并且可以使用用以评估设备和/或产品(例如,光学识别)的各种其它方式。例如,三维表示可以由相机131捕获的超过一个二维光学图像生成。许多摄影测量装置、数字相机和/或数字单透镜反射(dslr)相机的实例可以用于以摄影测量法生成被监测产
品、负载等的三维或其它表示。传感器可以在设定时间或基于事件(例如,在接收到触发或发出警报时)持续操作。由监测工具125收集的信息可以提供给基站装置133和/或远程装置,以供持续地、周期性地、按需地或分批地处理或使用。不管传递模式如何,系统都可以被操作以提供历史和/或实时数据和/或评估。
44.监测工具125可以包含多个传感器。在一个实例中,监测工具125可以包含收集不同类型信息的多个表面特性化装置131。例如,监测工具可以使用红外、可见和/或紫外波长从传感器收集数据。所收集的信息可以集成在一起以与存储在数据库194中的信息进行比较。监测工具125可以例如收集用于特性化例如土料的材料的超光谱图像。高光谱传感器可以是例如韩国公开案kr101806488中所公开的传感器,所述韩国公开案以引用的方式并入本文中。传感器可以生成x射线或偏振光,所述x射线或偏振光是从所收集的矿石反射回的且是由无人驾驶载具上的传感器收集的。
45.传感器131和/或处理器199可以被配置成在人机界面(hmi)171(图9)上生成信息,以供设备操作员、经理、审计师、承包商、供应商和/或其它人员使用。例如,hmi 171可以是手持式装置128或其它监测器。手持式装置可以是例如可以由操作员2握住和/或携带的计算机、电话、平板计算机或其它小型装置。hmi可以位于例如土方设备的驾驶室、维修载具、站、办公室等中。手持式装置128或其它hmi可以包含处理器199,其可以组合来自监测工具125、云数据库194、其它数据源、其它远程装置等的数据,以提供信息和分析。当监测工具125监测产品时,操作员可以实际握住手持式装置128(图8)。hmi171可以替代地安装在固定或可调整支撑件上。参考图9,hmi 171可以是无线或有线装置,可以与挖掘设备中的显示系统集成,和/或可以位于远程位置中。
46.hmi 171可以包含关于被监测内容的信息。在图9所示的实例中,hmi包含视觉警报100、无人驾驶载具136的导航控制器112、传感器控制器110、挖掘路径优化接口116等。(图9)。hmi 171可以被配置成提供产品176的当前状态的图形显示器173。例如,显示器173可以被配置成显示例如被监测产品176的配置文件和/或由传感器131(例如,相机)捕获的图像。图像可以包含实况视频馈送。显示器173可以被配置成显示静态图像和/或视频图像两者。可以从相对于产品确定的而不是主要取决于挖掘机控制器的操作员操纵的有利位置捕获配置文件179或图像。显示器173还可以显示指示例如磨损程度的图形表示185。图形表示可以是或包含文本和/或数字值和/或状况,例如“破损斗齿”等。以此方式,工地处或与工地相关联的操作员或其他工作人员可以经由警报100意识到产品的潜在问题或特性,并且能够确认或斟酌所述状况,和/或提供关于所述状况的严重程度的价值判断。以此方式,可以减少不必要的停机。在另一实例中,hmi 171可以被设计成显示历史图表185,以便操作员可以确定警报发生的时间,以便操作员可以在产品丢失的情况下采取必要的措施。虽然具体实例在图9中示出,但它们仅意味着作为实例而非限制性的。
47.监测工具125可以包含用于操纵至少一个电子装置或传感器131的操纵装置129(例如,铰接、控制臂、驱动的万向接头等)。操纵臂129可以在一个末端45处牢固地连接到无人驾驶载具36,并且在相对末端146处牢固地连接到传感器131。在某些实例中,安装操纵装置129,以便其可以获得更好的视图(例如,清晰的视距)以监测产品。处理器199可以包含用以控制操纵装置129的定向的指令。操纵装置129可以例如是受控制的铰接臂、旋转接头或其它操纵器具。
48.监测工具125和/或单独的处理器199可以包含用以控制电子装置或传感器131的指令。传感器131以物理方式与监测工具125的无人驾驶载具136联接和/或安装在所述无人驾驶载具上,并且可以被配置成监测土方操作的至少一个特性,在一个实例中,所述至少一个特性包含对地面接合用产品的监测。传感器131可以任选地与独立于无人驾驶载具的一个或多个其它传感器结合工作。单独的传感器可以任选地定位在土方设备、维修载具等上。系缆无人驾驶载具136上的传感器31可以是收集数据的无源或有源传感器。
49.图10示出了系统639的另一实例,其中涉及监测土方操作的至少一个特性,所述至少一个特性包含拖运卡车601的卡车托盘603的负载。在图1中使用与先前附图中类似的附图标记来指代相同或类似的特征,但在图11中,使用“600系列”(例如,如果在图1a、1b和5
‑
6中使用具有附图标记“xx”的特征,则相同或类似的特征可以在图11中以附图标记“6xx”示出)。系统639包含具有卡车托盘603的拖运卡车601、通信网络640和监测工具625。卡车托盘603可以是空的或携带负载624(以虚线示出)。卡车托盘603可以进一步包含滑槽和其它磨损零件。
50.在一个实例中,监测工具625可以提供用于对土方操作的特性进行实时评估的数据。电子装置631可以生成表示负载的两个(2d)或三维(3d)点云。在一个替代方案中,监测工具625可以监测卡车601内的负载624(例如,在卡车床603上),而不中断负载卡车601的操作。监测卡车601的负载624使得土方设备的操作员了解例如他们何时已达到完全、均匀分布的负载。卡车601过载可能会导致过早的磨损和/或损坏,并且负载不足可能会导致次优操作。监测工具625可以例如包含对挖掘设备603、拖运卡车601、土料624等的同时监测。
51.监测工具和/或系统可以使用可编程逻辑基于例如负载624的二维或三维配置文件来确定土方设备内的土料的量。监测工具和/或系统还可以基于(例如,从轮廓确定的)体积、(例如,通过挖掘或通过破碎的)材料的破碎程度和/或矿石浓度来确定卡车601内的负载624的估计重量。监测工具625还可以通过将估计重量与来自安装在土方设备上的负载监测单元的指定重量进行比较来验证负载624的估计重量。