1.本实用新型涉及无人机防撞技术领域,尤其涉及一种无人机用防冲撞型激光扫描仪。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.但是现有技术中,现有的无人机在飞行的过程中时常由于信号终端或操作技术较差,以至于会出现飞行时摔落到地面,从而造成无人机上的激光扫描仪摔坏损毁导致无法进行正常使用,并且无人机的激光扫描仪属于价格高昂的配件,若产生碰撞摔落则会产生使用成本增加的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,旨在解决现有的无人机在飞行的过程中时常由于信号终端或操作技术较差,以至于会出现飞行时摔落到地面,从而造成无人机上的激光扫描仪摔坏损毁导致无法进行正常使用,并且无人机的激光扫描仪属于价格高昂的配件,若产生碰撞摔落则会产生使用成本增加的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种无人机用防冲撞型激光扫描仪,包括无人机,所述无人机的底部固定安装有伸缩机构,所述伸缩机构的四角活动安装有伸缩杆,所述无人机的内侧设置有四组重力铅锤,所述无人机的四周设置有四组机翼,所述无人机的底部固定安装有两组机架。
6.作为一种优选的实施方式,所述无人机的顶部固定安装有激光扫描仪,所述无人机的顶部固定安装有防撞缓冲架。
7.作为一种优选的实施方式,所述重力铅锤的顶部固定连接有拉线,所述拉线固定连接在无人机的内侧,所述无人机的内部固定安装有水平仪,所述水平仪的顶部固定安装有主板。
8.作为一种优选的实施方式,所述防撞缓冲架的底部固定安装有快拆安装座,所述快拆安装座固定安装在无人机的顶部。
9.作为一种优选的实施方式,所述无人机的底部开设有四组储放槽,所述重力铅锤设置在储放槽的内侧,所述拉线设置在储放槽的内侧。
10.作为一种优选的实施方式,所述防撞缓冲架的顶部设置有防撞缓冲环。
11.与现有技术相比,本实用新型的优点和积极效果在于,
12.1、本实用新型中,通过采用在无人机的底部设置有伸缩机构,并且将该伸缩机构连接上无人机内部的水平仪设备,并且在无人机的底部内侧设置有四组用拉线拉住的重力铅锤,从而方便了当无人机即将摔落的过程中会产生翻转,在翻转的过程当中水平仪会检测到,随后控制伸缩机构将伸缩杆收缩,随之即可释放出重力铅锤,甩出的重力铅锤会产生
向下的作用力,从而有效地保证无人机立即保持平稳的状态,避免了由于信号终端或操作失误造成无人机坠落的问题。
13.2、本实用新型中,通过将无人机的激光扫描仪设置在顶部,并且在无人机的顶部固定安装有防撞缓冲架,通过防撞缓冲架可在无人机摔落后对顶部的激光扫描仪进行缓冲保护,并且防撞缓冲架的底部时通过快拆安装座进行安装座,从而即使摔落后导致无人机的防撞缓冲架摔坏了,还可以将其拆掉进行更换,有利于便于快速更换维修的作用。
附图说明
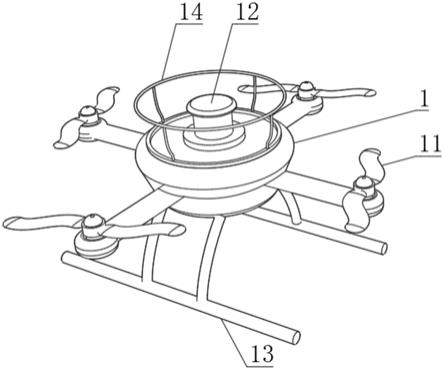
14.图1为本实用新型提出一种无人机用防冲撞型激光扫描仪的立体图;
15.图2为本实用新型提出一种无人机用防冲撞型激光扫描仪的空心壳剖视立体图;
16.图3为本实用新型提出一种无人机用防冲撞型激光扫描仪的部分收缩立体图。
17.图4为本实用新型提出一种无人机用防冲撞型激光扫描仪的部分伸出立体图
18.图例说明:
19.1、无人机;2、主板;3、伸缩机构;
20.11、机翼;12、激光扫描仪;13、机架;14、防撞缓冲架;
21.21、水平仪;
22.31、伸缩杆;32、重力铅锤;33、储放槽;34、拉线。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.实施例1
25.如图1
‑
3所示,本实用新型提供一种技术方案:一种无人机用防冲撞型激光扫描仪,包括无人机1,无人机1的底部固定安装有伸缩机构3,伸缩机构3的四角活动安装有伸缩杆31,无人机1的内侧设置有四组重力铅锤32,无人机1的四周设置有四组机翼11,无人机1的底部固定安装有两组机架13,重力铅锤32的顶部固定连接有拉线34,拉线34固定连接在无人机1的内侧,无人机1的内部固定安装有水平仪21,水平仪21的顶部固定安装有主板2,无人机1的底部开设有四组储放槽33,重力铅锤32设置在储放槽33的内侧,拉线34设置在储放槽33的内侧。
26.在本实施例中,在无人机1的底部设置有伸缩机构3,并且将该伸缩机构3连接上无人机1内部的水平仪21设备,并且在无人机1的底部内侧设置有四组用拉线34拉住的重力铅锤32,从而方便了当无人机1即将摔落的过程中会产生翻转,在翻转的过程当中水平仪21会检测到,随后控制伸缩机构3将伸缩杆31收缩,随之即可释放出重力铅锤32,甩出的重力铅锤32会产生向下的作用力,从而有效地保证无人机1立即保持平稳的状态。
27.实施例2
28.如图1
‑
3所示,无人机1的顶部固定安装有激光扫描仪12,无人机1的顶部固定安装有防撞缓冲架14,防撞缓冲架14的底部固定安装有快拆安装座,快拆安装座固定安装在无
人机1的顶部,防撞缓冲架14的顶部设置有防撞缓冲环。
29.在本实施例中,在无人机1的顶部固定安装有防撞缓冲架14,通过防撞缓冲架14可在无人机1摔落后对顶部的激光扫描仪12进行缓冲保护,并且防撞缓冲架14的底部时通过快拆安装座进行安装座,从而即使摔落后导致无人机1的防撞缓冲架14摔坏了,还可以将其拆掉进行更换,有利于便于快速更换维修。
30.本实施例的工作原理:
31.如图1
‑
3所示,首先,在无人机1正常飞行的过程中,底部的伸缩机构3会保持伸出阻挡重力铅锤32的状态,以保证降低能量消耗,当无人机1即将摔落的过程中会产生翻转,在翻转的过程当中水平仪21会检测到,随后控制伸缩机构3将伸缩杆31收缩,随之即可释放出重力铅锤32,甩出的重力铅锤32会产生向下的作用力,从而有效地保证无人机1立即保持平稳的状态,另外即使没有保证平稳飞行降落,造成摔落在地也可通过防撞缓冲架14可在无人机1摔落后对顶部的激光扫描仪12进行缓冲保护,并且防撞缓冲架14的底部时通过快拆安装座进行安装座,从而即使摔落后导致无人机1的防撞缓冲架14摔坏了,还可以将其拆掉进行更换即可。
32.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。