1.本发明涉及利用无人机安全技术领域,具体是涉及一种车载无人机系统及其违章督查方法。
背景技术:
2.目前车载无人机停降锁止机构要求无人机底座完全停入卡槽中,或者是对无人机中心位置、朝向等位置信息有严格要求,这就会导致无人机和车载控制模块间因为精细位置调整不断进行通讯反馈,导致停机时间较长。而车载配套换电机构也是依赖无人机的精确定位,根据预设的运动参数控制换电机构进行动作,缺乏对无人机停机位置偏移的容忍度。此外,现有无人机多用于车辆违章、设备巡检等领域,在电力施工领域的人员违章督查方面仍无基于无人机的有效督查手段。
技术实现要素:
3.发明目的:针对以上缺点,本发明提供一种车载无人机系统,实现无人机无需精准的停止至定位槽就能够被固定,减少通讯反馈的时间;提升无人机换电机构对于无人机停机位置偏移的容忍度;实现对于电力施工领域人员违章行为的督查。同时,本发明基于所述车载无人机系统提供一种违章督查的方法,能够对违章行为进行督查。
4.技术方案:为解决上述问题,本发明一种车载无人机系统,包括:无人机、无人机底部支架、机动车、安装在机动车内部的车载控制模块、安装在机动车顶部的车载升降平台,还包括无人机锁止装置,无人机锁止装置包括至少1组万向活动压杆、固定在万向活动压杆内侧的压力传感器以及若干通电逻辑吸合线圈;所述万向活动压杆的一端通过设置万向轴头连接在车载升降平台上;所述通电逻辑吸合线圈在通电状态下与万向活动压杆的另一端吸合,通电逻辑吸合线圈在断电状态下,万向活动压杆与通电逻辑吸合线圈解除吸合,所述万向轴头将万向活动压杆回弹复位;若干通电逻辑吸合线圈均匀的分布在以万向活动压杆固定在车载升降平台的一端为圆心,以万向活动压杆的长度为直径的圆的周向上;所述车载控制模块逐一给通电逻辑吸合线圈通电,使万向活动压杆逐一与通电逻辑吸合线圈吸合,若车载控制模块未接收到压力传感器传送的压力值,则所述车载控制模块给当前通电逻辑吸合线圈断电,给下一个通电逻辑吸合线圈通电,直至车载控制模块接收到压力传感器传送的压力值,车载控制模块停止对通电的逻辑吸合线圈进行断电操作。
5.有益效果:本发明相对于现有技术,其显著优点是:通过设置车载控制模块逐一给通电逻辑吸合线圈通电,以压力感受器感受压力为标准,使得通电逻辑吸合线圈不断的与万向活动压杆吸合、断开,多角度的判断无人机底部支架的停止位置,进而固定,无需调整无人机精准的停止至定位槽或者指定的位置,减少实现精准定位所产生的通讯反馈时间。
6.进一步的,所述的万向轴头包括与万向活动压杆的一端连接的球头、固定在车载升降平台上的万向轴座以及连接球头和万向轴座的支撑装置;在通电逻辑吸合线圈在断电状态下,所述支撑装置用于保证与通电逻辑吸合线圈吸合的万向活动压杆回弹复位。
7.进一步的,所述的支撑装置为弹簧或者磁力装置。
8.进一步的,还包括无人机电池盖、设置在车载升降平台上的三关节机械臂、备用电池库,所述三关节机械臂装载有前端边缘计算控制模块和第二高清摄像头;所述第二高清摄像头向前端边缘计算控制模块传输图像信息,所述前端边缘计算控制模块依据图像信息获取无人机电池盖的定位坐标并控制三关节机械臂开合无人机电池盖、取放无人机和备用电池库中的电池。采用前端边缘计算控制模块计算电池盖的坐标,减少了充电机构对于无人机精准停止的要求,提升对于停止位置偏移的容忍度。
9.进一步的,还设置用于连接机动车内的车载电池和备用电池库的连接线,通过连接线对备用电池库的电池充电。
10.进一步的,还包括:远程安全督查平台,用以确认督查现场和督查的内容;车载控制模块,根据督查现场定位规划无人机最优飞行航线;ai模块,用以识别图像信息中的违章行为以及违章人员面部特征;第一高清摄像头,向ai模块传输图像信息;所述ai模块、第一高清摄像头装载于无人机中,远程安全督查平台通过车载控制模块与ai模块交互通信;ai模块可进行信息融合计算,与无人机进行通讯并驱动无人机中的飞行控制装置控制无人机的飞行。
11.进一步的,所述车载控制模块连接用于实时显示信息的显示器。
12.进一步的,车载升降平台上还设有与ai模块进行信息传输的第三高清摄像头;所述第三高清摄像头用于监控无人机底部支架是否落于车载升降平台。
13.本发明还采用一种基于车载无人机系统进行智能违章监督的方法,所述车载无人机系统包括无人机、无人机底部支架、机动车、远程安全督查平台、车载控制模块、ai模块、第一高清摄像、车载升降平台等设备;具体的方法包括以下步骤:
14.(1)远程安全督查平台根据作业环境筛选需要违章督查的现场,将定位和督查内容发送至车载控制模块;
15.(2)车载控制模块根据定位规划无人机最优飞行航线传输至ai模块,万向活动压杆打开,ai模块控制无人机的飞行;
16.(3)第一高清摄像头将拍摄的图像信息传输至ai模块,ai模块通过图像信息识别违章行为以及违章人员的面部特征,识别完毕后,将识别的违章行为图像以及违章人员的面部特征传送至车载控制模块存储;
17.(4)车载控制模块将违章行为图像以及违章人员的面部特征传送至远程安全督查平台,纳入违章积分管理系统。
18.进一步的,步骤(4)具体包括:
19.(41)车载控制模块将识别的违章行为图像呈现在显示器上;
20.(42)通过显示器进行人为的判断,确认识别无误后,车载控制模块将违章行为图像以及违章人员的面部特征传送至远程安全督查平台。
21.有益效果:本发明相对于现有技术,其显著优点是利用监督方法实现对于违章行为的督查,节省督查的人力资源。
附图说明
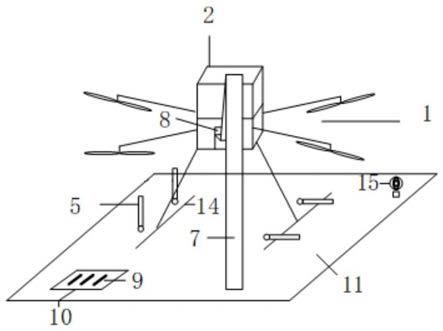
22.图1所示为本发明所述的一种车载无人机系统外部示意图;
23.图2所示为本发明中无人机升降平台及无人机升降平台上各种设备的示意图;
24.图3所示为本发明中无人机锁止装置锁定状态的示意图;
25.图4所示为本发明中三关节机械臂、备用电池以及连接线的示意图;
26.图5所示为本发明所述智能违章监督方法的流程图。
具体实施方式
27.如图1所示,本发明所述的一种车载无人机系统包括:无人机1、装载在无人机1上的ai模块2和第一高清摄像头4、机动车3、安装在机动车3顶部的车载升降平台11、安装在机动车3内的车载控制模块16、远程安全督查平台12。所述的ai模块2通过有线通讯与无人机1通信获取无人机高度、无人机姿态信息、无人机位置信息;所述ai模块2通过无线通讯与车载控制模块16通信,进而获取车辆定位信息和车辆状态信息;所述ai模块2可进行信息融合计算,用以识别图像信息中的违章行为以及违章人员面部特征,驱动无人机1中的飞行控制装置控制无人机1的飞行。所述的车载控制模块16通过无线通讯的方式与远程安全督查平台12进行通讯,进而获取督查现场定位信息并规划无人机1最优飞行航线;车载控制模块16还连接有用于显示信息的显示屏13。所述的第一高清摄像头4能够向ai模块2传输图像信息;所述安全督查平台12用以确认督查现场和督查的内容。
28.如图2至图3所示,车载升降平台11上还设置有无人机锁止装置5、第三高清摄像头15;所述的无人机锁止装置5包括万向活动压杆51、固定在万向活动压杆51内侧的压力传感器52以及通电逻辑吸合线圈53;所述的万向活动压杆51共有四组,万向活动压杆51的一端通过设置万向轴头511垂直的固定在车载升降平台11上,所述通电逻辑吸合线圈53在通电状态下与万向活动压杆51的另一端吸合;所述的万向轴头511包括与万向活动压杆51的一端连接的球头501、固定在车载升降平台上11的万向轴座502以及连接球头501和万向轴座502的支撑装置503;所述支撑装置503为弹簧,该弹簧的回弹力小于通电逻辑吸合线圈53通电时产生的磁场吸附力,故通电逻辑吸合线圈53在断电状态下,所述支撑装置503使得万向活动压杆51回弹复位;每一个万向活动压杆51以万向轴座502为圆心,以万向活动压杆51的臂长为直径形成圆,在该圆的周向方向上均匀的设置4个通电逻辑吸合线圈53。
29.无人机1的底部设置对称的两个无人机底座支架14,靠近每一个无人机底座支架14预设的停置定位点处均匀设置两个无人机锁止装置5;在没有督查任务时,无人机1通过无人机底部支架14停在车载升降平台11上,车载控制模块16通过控制通电逻辑吸合线圈53通电,使得通电逻辑吸合线圈53以逆时针的顺序逐个通电产生吸附力,吸附万向活动压杆51,若万向活动压杆51未与无人机底端支架14接触,车载控制模块16未接收压力传感器52传送的压力值,车载控制模块16给当前通电逻辑吸合线圈53断电,给下一个通电逻辑吸合线圈53通电,直至车载控制模块16接收到压力传感器52传送的压力值,车载控制模块16停止对通电的逻辑吸合线圈53进行断电操作。万向活动压杆51的内侧为弹性材料,便于固定无人机底端支架14。
30.无人机有督查任务时,车载控制模块16断开通电,无人机1飞离车载升降平台11,万向活动压杆51垂直于车载升降平台11。此外,可以根据无人机底座支架14的大小,增设或减少适量的无人机锁止装置5。所述第三高清摄像头15用于监控无人机底部支架14的停机位置,若停机位置偏离预定位置较大,如底部支架14落在升降平台11的外部,则第三高清摄
像头15将拍摄的图像信息上传至ai模块2,ai模块2依据车辆状态信息和无人机状态信息控制无人机1飞行并调整无人机1的位置,使其降落至升降平台11内。对于施工范围较大的场景,可以在机动车1上加装平板天线增益放大装置,平板天线与无人机1的控制器通过功率放大器相连。
31.车载升降平台11还设置了三关节机械臂7、备用电池9;所述的三关节机械臂7上装载有前端边缘计算控制模块20,前端边缘计算控制模块20上还设置第二高清摄像头21,所述的备用电池库9通过连接线10与机动车3的车载电池相连接。当无人机1停止在车载升降平台11上,所述第二高清摄像头21向前端边缘计算控制模块20传输包含无人机电池盖8位置的图像信息,前端边缘计算控制模块20依据图像信息计算获取无人机电池盖8的定位坐标,根据定位坐标控制三关节机械臂7打开无人机电池盖8,取出无人机1内的电池放置备用电池库9并取出备用电池库9中另外一块电池安装到无人机1中。
32.如图5所示,利用本发明所述的车载无人机系统进行电力作业违章督查方法包括以下步骤:
33.第一步,远程安全督查平台经违章大数据分析确定违章频发的单位和个人。其中,违章频发的单位和个人由违章积分进行排序,违章积分依据违章严重程度每日进行统计。
34.第二步,比对每日作业计划,筛选步骤一中单位和个人的现场,再根据电压等级、作业位置、是否为高空作业、督查人员不方便进入等筛选无人机适用工作场景,确定当日重点督查现场;其中,上述筛选条件基于知识图谱等检索技术实现。
35.第三步,远程安全督查平台发送定位和督查工作内容至车载控制模块,车载控制模块为机动车和无人机实时规划最优组合航线;其中,无人机最优组合航线同时满足飞抵时间早于作业时间、无人机续航可支撑单次来回航程的条件。
36.第四步,车载控制模块将最优航线传输到机载ai模块时,万向活动压杆打开,ai模块依据航线控制无人机飞行;第一高清摄像头实时采集施工现场视频资料,传输至ai模块中进行分析,ai模块应用深度学习、边缘计算、卷积神经网络轻量化等技术对违章行为进行精确识别,发现违章后对违章人员开展面部识别;采集的违章人员面部特征和ai识别违章行为图像均通过ai模块传输至车载控制模块储存。
37.第五步,车载控制模块存储的违章人员面部特征和违章行为图像显示在显示器中,后台人员对违章行为进行再一次确认,如果识别无误,车载控制模块将违章行为图像和违章人员面部特征传送回远程安全督查平台,远程安全督查平台通过数据库进行信息匹配,将违章人员及其行为纳入违章积分管理系统。