1.本实用新型涉及无人机领域,特别涉及一种无人机自动充电装置。
背景技术:
2.现有中,多通过设置停机平台供无人机起降,并且当无人机在平台上停放时,对无人机进行充电。
3.进一步的,在停机平台上需要对无人机位置进行固定,如此才能保证充电的顺利进行,现有技术中,多采用推杆系统对无人机进行位置固定,然后再进行充电,如申请号202010077773.5、“电力巡线无人机无线充电中继站、充电飞控系统及方法”的方案中通过横行夹紧机构和纵向夹紧机构夹紧固定无人机,申请号201610972770.1、“一种无人机自主充电平台”的方案中通过两组纵向推杆组件及两组横向推杆组件协同作用,将无人机定位于升降平台上的设定位置。
4.上述两组方案中,均需要通过推杆装置将无人机到特定位置才能进行充电,由此对无人机的降落提出了更高要求,增加了操作的复杂程度,同时,由于推杆装置结构复杂,其容易发生卡塞等故障,且对推杆运行的精度要求很高,否则无法将无人机准确定位到特定位置,进一步导致使用成本高、维护难度大。
技术实现要素:
5.本实用新型的目的在于提供一种无人机自动充电装置,其无需被推杆机构等装置固定于停机平台的特定位置,其只需任意、正常地停放在停机平台上即可实现快速接触式充电。
6.本实用新型提供一种无人机自动充电装置,其包括:停机平台;若干平台电极,其安装在所述停机平台的上表面;若干压力传感器,且每一平台电极底部均对应连接一压力传感器;
7.无人机脚架,其包括连接无人机机身的机身连接部以及连接所述机身连接部的两个脚架底部;
8.脚架充电电极,且每一脚架底部均连接有至少一个脚架充电电极;充电控制单元,其与每一压力传感器电连接;供电电源,其与所述充电控制单元连接;以及无人机电源,其安装在无人机机身上,且与所述充电控制单元连接;
9.当脚架充电电极与平台电极接触时,通过无人机自身重力触发安装在该平台电极底部的压力传感器,由此产生充电信号,所述充电控制单元根据所述充电信号控制供电电源向无人机电源进行充电。
10.优选的,每一个脚架底部的外表面连接有若干个脚架充电电极。
11.优选的,每一个脚架底部为内部中空的管状结构。
12.优选的,若干平台电极在所述停机平台的上表面以n*m的方式进行设置,其中n为行数,m为列数。
13.优选的,所述充电控制单元包括:第一充电通路接通单元、第二充电通路接通单元,其中,同一个压力传感器同时连接所述第一充电通路接通单元以及第二充电通路接通单元,以及,所述第一充电通路接通单元、第二充电通路接通单元均连接所述供电电源。
14.优选的,所述第一充电通路接通单元包括:若干第一信号开关,且每一信号开关均对应连接一个压力传感器;第一正极接通开关,其连接所述供电电源的正极;第一负极接通开关,其连接所述供电电源的负极。
15.优选的,所述第二充电通路接通单元包括:若干第二信号开关,且每一信号开关均对应连接一个压力传感器;第二正极接通开关,其连接所述供电电源的正极;第二负极接通开关,其连接所述供电电源的负极。
16.优选的,每一平台电极均为正方形块状结构,其边长为d。
17.优选的,两个脚架底部的中心距离为a,每一脚架底部的长度均为b,相邻两个平台电极之间的间距为c,每一脚架充电电极的宽度为e、长度为f,且满足条件:a
‑
e≥d、e≥c。
18.优选的,所述压力传感器为压敏电阻。
19.本实用新型中的无人机自动充电装置设置有压敏电阻等压力传感器,无需被推杆机构等装置固定于停机平台的特定位置,其只需任意、正常地停放在停机平台上,通过压力传感器触发充电通路即可实现快速接触式充电,其整体操作简单,且后期无需进行复杂的维护,可大幅降低使用成本。
附图说明
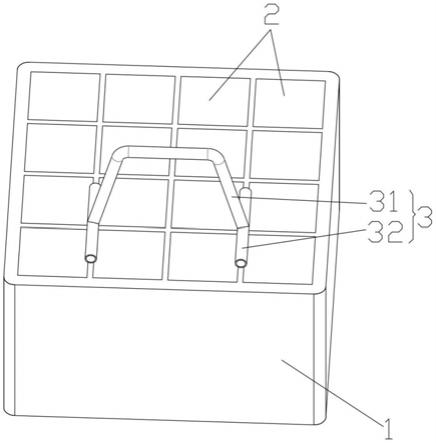
20.图1是本实用新型无人机自动充电装置的整体结构图;
21.图2是本实用新型充电控制单元的结构示意图;
22.图3是本实用新型无人机脚架的结构图;
23.图4a是本实用新型无人机自动充电装置的俯视图;
24.图4b是本实用新型无人机自动充电装置的侧视图;
25.图4c是本实用新型无人机自动充电装置的正视图。
具体实施方式
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
27.实施例1:
28.如图1
‑
3所示,本实施例中的无人机自动充电装置包括:
29.停机平台1,其整体为箱型结构,且内部中空;
30.若干平台电极2,其可拆卸的安装在所述停机平台1的上表面;本实施例中,每一平台电极均为正方形块状结构,其边长为d,且在所述停机平台1的上表面以n*m的方式进行设置,其中n为行数,如4,m为列数,如4,因此,本实施例中所述平台电极2的总数为16个;
31.若干压力传感器r1、r2...rp,且每一平台电极2底部均对应连接一压力传感器,同时,每一压力传感器均位于所述停机平台1内部,由此,p=平台电极2的总数,例如16;
32.无人机脚架3,其包括连接无人机机身的机身连接部31以及连接所述机身连接部31的两个脚架底部32,且至少一个(优选2个)脚架底部32为内部中空的管状结构,由此减轻
结构整体重量;
33.若干脚架充电电极4,且每一脚架底部32的外表面连接有若干个脚架充电电极4;本实施例中,每一脚架底部32的外表面均连接有2个脚架充电电极4,由此可通过2个无人机脚架3同时充电,提高充电效率,同时,每一脚架底部32上设置2个脚架充电电极4还可使得无人机与停机平台1有2个接触点,由此保证无人机平稳停放;
34.充电控制单元,其安装在所述停机平台1内部,且与每一压力传感器r1、r2...rp电连接;
35.供电电源,其安装在所述停机平台1内部,且与所述充电控制单元连接;
36.以及无人机电源,其安装在无人机机身上,且与所述充电控制单元连接。
37.当无人机停放在停机平台1上表面上、且脚架底部32外表面的脚架充电电极4与平台电极2接触时,通过无人机自身重力触发安装在该平台电极2底部的压力传感器,由此产生充电信号,所述充电控制单元根据所述充电信号控制供电电源(即图2中的“+”、
“‑”
即为供电电源的正极和负极)向无人机电源(如蓄电池)进行充电。
38.具体的,本实施例中的无人机自动充电平台工作过程如下:
39.由此,本实施例的无人机自动充电平台结构设计简单,无人机无需被推杆机构等装置固定于停机平台1的特定位置,其只需任意、正常地停放在停机平台1上,通过压力传感器触发充电通路即可实现快速接触式充电,其整体操作简单,且后期无需进行复杂的维护,可大幅降低使用成本。
40.实施例2:
41.本实施例与实施例的不同之处仅在于,如图4a
‑
4c所示,两个脚架底部32的中心距离为a,每一脚架底部32的长度均为b,相邻两个平台电极2之间的间距为c,同时,每一脚架充电电极4的宽度为e、长度为f,且上述尺寸参数设置满足条件:a
‑
e≥d、e≥c,由此可保证无人机无论停放在停机平台1的任何地方,脚架底部32均能触发压力传感器,以顺利完成充电。
42.实施例3:
43.本实施例与实施例的不同之处仅在于,如图2所示,所述充电控制单元包括:第一充电通路接通单元100、第二充电通路接通单元200,其中,所述第一充电通路接通单元100、第二充电通路接通单元200并联设置,且同一个压力传感器同时连接所述第一充电通路接通单元100以及第二充电通路接通单元200,同时,所述第一充电通路接通单元100、第二充电通路接通单元200均连接所述供电电源;
44.当无人机的一个脚架底部32上的脚架充电电极4与一个/多个平台电极2接触时,触发安装在该平台电极2底部的压力传感器,以产生第一充电信号,同时,所述第一充电通路接通单元100根据所述第一充电信号接通对应的压力传感器,以及根据来自于无人机、遥控器等设备发送的第一切换信号接通供电电源的正极和负极中的一个;
45.当无人机的另一个脚架底部32上的脚架充电电极4与一个/多个平台电极2接触时,触发安装在该平台电极2底部的压力传感器,以产生第二充电信号,同时,所述第二充电通路接通单元200根据所述第二充电信号接通对应的压力传感器,以及根据来自于无人机、遥控器等设备发送的第二切换信号接通供电电源的正极和负极中的另一个;
46.由此,供电电源的正极、第一充电通路接通单元100、一个脚架底部32上的脚架充
电电极4以及与其接触的平台电极2和该平台电极2底部的压力传感器、另一个脚架底部32上的脚架充电电极4以及与其接触的平台电极2和该平台电极2底部的压力传感器、第二充电通路接通单元200、供电电源的负极即构成一完整的充电电路。
47.具体的,所述第一充电通路接通单元100包括:
48.若干第一信号开关s1、s2、s3...sp,且每一信号开关均对应连接一个压力传感器;
49.第一正极接通开关s
‑
1,其连接所述供电电源的正极(即“+”极);
50.第一负极接通开关s
‑
2,其连接所述供电电源的负极(即
“‑”
极)。
51.所述第二充电通路接通单元200包括:
52.若干第二信号开关s1’、s2’、s3’...sp’,且每一信号开关均对应连接一个压力传感器;
53.第二正极接通开关s
‑1’
,其连接所述供电电源的正极(即“+”极);
54.第二负极接通开关s
‑2’
,其连接所述供电电源的负极(即
“‑”
极)。
55.当无人机的一个脚架底部32上的脚架充电电极4与一个/多个平台电极2接触时,触发安装在该平台电极2底部的压力传感器(如压力传感器r1和/或r2),以产生第一充电信号,同时接通与该压力传感器对应的第一信号开关(如第一信号开关s1和/或s2),同时,所述第一充电通路接通单元100根据来自于无人机、遥控器等设备发送的第一切换信号控制第一正极接通开关s
‑
1、第一负极接通开关s
‑
2中一个动作,以接通供电电源的正极和负极中的一个;
56.当无人机的另一个脚架底部32上的脚架充电电极4与另外的一个/多个平台电极2接触时,触发安装在该平台电极2底部的压力传感器(如压力传感器r5和/或r6),以产生第二充电信号,同时接通与该压力传感器对应的第二信号开关(如第二信号开关s5’和/或s6’),同时,所述第二充电通路接通单元200根据来自于无人机、遥控器等设备发送的第二切换信号控制第二正极接通开关s
‑1’
、第二负极接通开关s
‑2’
中一个动作,以接通供电电源的正极和负极中的另一个;由此形成完整的充电通路。
57.实施例4:
58.本实施例与实施例1的不同之处仅在于,如图4所示,所述机身连接部31整体为u型结构,且机身连接部31为内部中空的管状结构,可一体成型;且所述压力传感器为压敏电阻。
59.综上所述,本技术中的无人机自动充电装置结构设计简单,其设置有压敏电阻等压力传感器,由此,无人机无需被推杆机构等装置固定于停机平台的特定位置,其只需任意、正常地停放在停机平台上,通过压力传感器触发充电通路即可实现快速接触式充电,其整体操作简单,且后期无需进行复杂的维护,可大幅降低使用成本。
60.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。