1.本发明涉及操控飞行器机翼的扭转角和前后反转的限位驱动装置,属于飞行器领域。
背景技术:
2.飞行器大致分为三类,包括传统的固定翼飞行器,旋翼飞行器及非传统的扑翼飞行器。固定翼飞行器以所谓固定翼飞行模式巡航飞行,具有高速高效率的优势,但不具备悬停或垂直起降性能;以直升机为例的旋翼飞行器具备垂直起降和悬停性能,但在前飞状态仍保持所谓旋翼飞行模式,飞行速度和效率都明显低于固定翼,将两者结合的组合式或倾转旋翼飞行器可通过改变推力方向实现两种飞行模式动转换,但有额外动力和机械系统的代价。其实固定翼和旋翼产生气动力的机理完全一样,不同之处主要在于它们的展弦比和两翼对称或反对称的安装,如果停止旋翼转动,并将一对旋翼中一侧的后行翼前后反转,与另一侧的前行翼对称,也就与固定翼同类了。自然界飞行物的飞行模式和气动增升机理则与固定翼和旋翼完全不同,但飞行模式介于两者之间,因此仿生扑翼的拍动模式也会根据飞行状态而不同,在悬停状态可分为两种,一种是以果蝇和蜂鸟翅在接近水平面内做前后反复运动为典型例子的横向拍动模式;第二种是以蜻蜓翅为例的在接近垂直面内做上下反复运动的纵向拍动模式;两种翅都以翅根为原点形成扇形拍动轨迹,在拍动过程中的扭转角在一定范围内连续变化获得所需的升力。在前飞状态,第一种拍动模式基本保持不变,与旋翼一样通过整体向前倾斜实现前飞所需推力分量,故属于旋翼飞行模式,其优势和缺点也与传统旋翼相同;第二种拍动模式与鸟类在前飞状态的拍动模式近似,但在拍动幅度和扭转角方面有明显差别,所以蜻蜓兼备垂直起降、悬停和类似鸟翅扑翼前飞甚至滑翔的飞行性能。将仿鸟翅拍动与旋翼转动结合的扑旋翼兼备比扑翼和旋翼更高的升力系数和旋翼高效率的优势,具有垂直起降和悬停性能,但是仍属于旋翼飞行模式,在前飞状态也存在与仿生扑翼和旋翼同样的问题,达不到仿鸟翅拍动模式的飞行速度和效率。
3.微小型飞行器携带方便,具有良好的隐蔽性,特别适于在狭窄空间和恶劣环境下完成勘探、侦查、救援等任务,成为近二十年来航空领域的研究热点。满足应用要求的高性能微小型飞行器,无论是旋翼还是仿生扑翼或扑旋翼,不仅需要具备可垂直起降、悬停性能以及敏捷性,因可携带电池的容量有限,还需要简化操控系统和大幅提高前飞的巡航效率和续航能力。于是,一种适用于微小型飞行器的机翼扭转角操控并可实现旋翼或扑旋翼反转的驱动机构,就成为实现飞行器的旋翼
‑
固定翼飞行模式或扑旋翼
‑
扑翼飞行模式之间可控转换的一个必要的关键技术和装置。
技术实现要素:
4.针对目前各类微小型飞行器尚不兼具旋翼和固定翼两种飞行模式或不能达到悬停和巡航状态综合最优的飞行性能的问题,本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置可解决的技术问题是:(1)实现旋翼与固定翼飞行器的飞行模式之间的
转换,也能够实现旋翼或扑旋翼与扑翼飞行模式的转换;(2)在保持以旋翼飞行模式垂直起降和悬停性能的前提下,有效提升以固定翼或扑翼飞行模式前飞的巡航效率和速度;(3)通过对机翼扭转角度的微调操控飞行器的飞行姿态和机动性。
5.本发明的目的是通过下述技术方案实现的:
6.本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,包括驱动器、铰接头、限位管、轴承、限位杆,扭转和反转的被控对象为机翼。所述驱动器用于驱动限位管。所述限位管用于限定机翼前缘与驱动器保持同轴关系。所述驱动器固连在驱动器后端的铰接头,铰接头与安装在飞行器机身上的纵轴相连接,驱动器前端的驱动轴插入并固定在限位管的一端;所述轴承a和轴承b的外经比限位管内经略小,所述略小指留出轴承a和轴承b与限位管的装配余量,将轴承a和轴承b安装在限位管内并将轴承外侧面与限位管内壁固定;所述限位杆包括限位杆a和限位杆b,将两个限位杆的内端固定在限位管外端的位置并随限位管转动,另一端不做约束;所述限位杆a和限位杆b之间的安装夹角γ根据飞行器气动性能和飞行模式而定。
7.所述机翼包括前梁、翼肋、次梁和翼膜。翼肋沿弦向安置并将一端固定在前梁靠近翼根端的位置,另一端不做约束;次梁安置在前梁和翼肋之间,一端也固定在前梁根部同样的位置,另一端不做约束;所述翼膜覆盖并固定在机翼前梁、次梁和翼肋上。所述机翼前梁的根部一端插入安装在限位管内的轴承a和轴承b的内径并固定;翼肋插在限位杆a和限位杆b之间。
8.当两个限位杆a和限位杆b随着驱动器和限位管被锁定在一个位置时,机翼前梁在轴承内自由转动,翼肋在限位杆a和限位杆b之间的限位夹角γ范围内自由扭转,即将机翼的扭转角限定在限位夹角γ范围内;当驱动器驱动限位管并带动限位杆a和限位杆b转动一个角度β时,翼肋在限位杆a或限位杆b的推动下也转动相应的角度,但仍被限制在夹角γ范围内自由摆动;通过调控限位夹角γ大小实现对机翼扭转角度的微调,进而调控飞行器的飞行姿态和机动性。根据飞行模式需求,驱动器驱动限位管和限位杆转动预定度时,翼肋在限位杆a或限位杆b的推动下也相应转动预定角度,使机翼按照预定角度实现前后反转,根据飞行模式需求,通过机翼前后反转实现机翼反对称或对称状态转换。当机翼反对称时作为旋翼或扑旋翼工作模式,当机翼对称时作为固定翼或扑翼工作模式,即实现旋翼与固定翼飞行器的飞行模式之间的转换,也能够实现旋翼或扑旋翼与扑翼飞行模式的转换。
9.在垂直起降和悬停时,保持旋翼或扑旋翼飞行模式能有效提升飞行效率与性能;在前飞时保持固定翼或扑翼飞行模式能有效提升巡航效率和速度。
10.为了各连接处达到最佳承力状态,作为优选,所述限位杆a、限位杆b均选用l型限位杆。
11.为了使机翼前梁的根部在限位管中的弯曲变形最小,轴承a与轴承b的安装间距尽量保持最大,作为优选,轴承a安装在靠近驱动器轴的外端,轴承b安装在靠近限位管的外端。
12.对于旋翼飞行器,作为优选,限位杆a与水平面之间的角度设置在10~20度范围。
13.对于扑旋翼飞行器,作为优选,限位杆a与水平面之间的角度设置在
‑
10~0度范围。
14.为了使机翼的扭转角在合理范围变化,作为优选,所述固定翼和旋翼限位杆a和限
位杆b的限位夹角γ为0度;所述扑翼限位杆a和限位杆b的限位夹角γ为0~10度;所述扑旋翼限位杆a和限位杆b的限位夹角γ为20~40度。
15.机翼前梁与翼肋的长度比根据机翼气动性能而定,作为优选,微小型飞行器的机翼前梁与翼肋的长度比值在3~4之间。
16.作为优选,所述翼梁、翼肋、次梁、限位管采用碳纤维复合材料制作;限位杆采用铝合金材料制作;轴承及铰接部件材料采用金属材料;翼膜材料采用聚酰亚胺;驱动器采用高减速比、高堵转力矩的驱动器。
17.本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,飞行模式转换包括旋翼
‑
固定翼飞行模式转换、旋翼
‑
扑翼飞行模式转换、扑旋翼
‑
扑翼飞行模式转换。
18.对于旋翼飞行器,在旋翼飞行模式时安装在纵向转轴两侧的机翼处于反对称,所述限位驱动装置的初始设置为:限位杆a与限位杆b之间的夹角0度,与水平面之间的夹角为预设角度,即翼攻角为预设角度。根据飞行模式需要机翼反转时,启动驱动器驱动限位管逆时针转动预设角度,与限位管固连的限位杆a和限位杆b随之也转动预设角度,其中限位杆a在转动时推动翼肋也转动预设角度,最终使翼肋带动翼前梁和整个机翼转动预设角度,使限位杆a和限位杆b同时分别转到对应的限位位置,两个限位杆互换上下位置,但与水平面之间的夹角仍保持预设角度,即机翼反转后仍保持预设攻角。此时锁住翼的旋转运动,两侧的机翼形成对称布局,实现旋翼
‑
固定翼飞行模式或旋翼
‑
扑翼飞行模式的转换。如果要实现扑翼或固定翼
‑
旋翼飞行模式的反向转换,只需通过驱动器驱动限位管顺时针转动预设角度度,并放开两翼的转动自由度,则返回到初始的旋翼状态。
19.对于扑旋翼飞行器,在旋翼飞行模式时安装在纵向转轴两侧的翼也处于轴对称,装置的初始设置为:限位杆a与水平面之间夹角为预设角度,限位杆b与水平面之间的夹角为预设角度,限位杆a与限位杆b之间的夹角为预设角度,处于两限位杆之间扑翼可在预设角度间自由扭转。在实施后行翼反转时,启动驱动器驱动限位管逆时针转动预设角度,与限位管固连的限位杆a和限位杆b随之也转动预设角度,其中限位杆a在转动时推动翼肋共同转动预设角度,最终使翼肋带动前梁和整个机翼反转预设角度。此时限位杆a转到对应的限位位置,与水平面之间的夹角为预设角度,而限位杆b转到对应的限位位置,与水平面之间的夹角为预设角度。虽然两个限位杆互换上下位置,机翼反转后仍然在限位杆a和限位杆b构成的夹角范围内在预设角度之间自由扭转。此时锁定翼的旋转运动,两侧的机翼形成对称布局,实现扑旋翼
‑
扑翼飞行模式的转换。实现扑翼
‑
扑旋翼飞行模式的反向转换,通过驱动器驱动限位管顺时针转动预设角度,并放开两翼的转动自由度,则返回到初始的旋翼或扑旋翼状态。
20.扑旋翼
‑
扑翼的运动分为拍动和扭转两个自由度同时进行,其中拍动角幅度由飞行器的驱动机构决定,而扭转角则由两个限位杆的位置决定。在上拍过程中,扑翼在惯性力矩和气动力矩作用下自由扭转产生正攻角,最大攻角在扑翼反转前后分别等于限位杆b和限位杆a与水平面的夹角;在下拍过程中,扑翼在惯性力矩和气动力矩作用下产生低头扭转角和最小攻角,最小攻角在扑翼反转前后分别等于限位杆a和限位杆b与水平面的夹角。
21.在完成上述旋翼或扑旋翼反转成对称布局的固定翼或扑翼飞行模式后,反转后的固定翼或扑翼通过驱动器驱动限位杆沿顺时针或逆时针转动预设角度δβ,使机翼的攻角改变为α
±
δβ,从而改变机翼的气动力实现对飞行姿态的操控。
22.根据飞行模式需求,通过机翼前后反转实现机翼反对称或对称状态转换。当机翼反对称时作为旋翼或扑旋翼工作模式,当机翼对称时作为固定翼或扑翼工作模式,即实现旋翼与固定翼飞行器的飞行模式之间的转换,也能够实现扑旋翼与扑翼飞行模式的转换。
23.在垂直起降和悬停时,保持旋翼或扑旋翼飞行模式能有效提升飞行效率与性能;在前飞时保持固定翼或扑翼飞行模式能有效提升巡航效率和速度。
24.有益效果:
25.1、本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,根据飞行模式需求,驱动器驱动限位管和限位杆转动预定度时,翼肋在限位杆a或限位杆b的推动下也相应转动预定角度,使机翼按照预定角度实现前后反转,根据飞行模式需求,通过机翼前后反转实现机翼反对称或对称状态转换。当机翼反对称时作为旋翼或扑旋翼工作模式,当机翼对称时作为固定翼或扑翼工作模式,即实现旋翼与固定翼飞行器的飞行模式之间的转换,也能够实现扑旋翼与扑翼飞行模式的转换。
26.2、本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,在实现有益效果1的基础上,在垂直起降和悬停时,保持旋翼或扑旋翼飞行模式能有效提升飞行效率与性能;在前飞时保持固定翼或扑翼飞行模式能有效提升巡航效率和速度。即使单一飞行器在多任务目标下转换飞行模式获得最优飞行性能。
27.3、本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,当两个限位杆a和限位杆b随着驱动器和限位管被锁定在一个位置时,机翼前梁在轴承内自由转动,翼肋在限位杆a和限位杆b之间的夹角γ范围内自由扭转,即将机翼的扭转角限定在夹角γ范围内;当驱动器驱动限位管并带动限位杆a和限位杆b转动一个角度β时,翼肋在限位杆a或限位杆b的推动下也转动相应的角度,但仍被限制在夹角γ范围内自由摆动;通过调控限位夹角γ大小实现对机翼扭转角度的微调,进而调控飞行器的飞行姿态和机动性,具有操作简单便利的优点。
28.4、本发明公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,在固定翼或扑翼飞行模式可通过操控机翼的扭转角实现飞行姿态的控制,无需副翼控制面。反转后的固定翼或扑翼,通过驱动器驱动限位杆沿顺时针或逆时针转动预设角度δβ,使机翼的攻角α改变为α
±
δβ,从而改变机翼的气动力实现对飞行姿态的操控。
附图说明
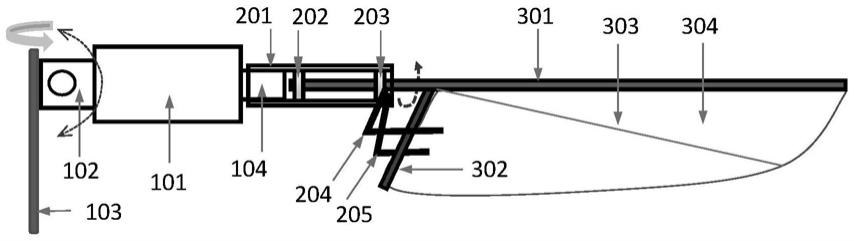
29.图1是本发明旋翼飞行器或扑旋翼飞行器一侧后行翼上安装的转换装置的示意图;
30.图2是本发明旋翼飞行器或扑旋翼飞行器一侧安装有转换装置的后行翼完成反转后的示意图;
31.图3是本发明转换装置对旋翼和扑旋翼飞行器一侧的后行翼实施反转前后的示意图,图3(a)为旋翼反转前后的位置变化;图3(b)为扑旋翼反转前后的位置变化;
32.其中:
33.101
‑
驱动器、102
‑
机翼铰接头、103
‑
飞行器动力纵轴、104
‑
驱动器驱动轴;
34.201
‑
限位管、202
‑
轴承a、203
‑
轴承b、204
‑
限位杆a、205
‑
限位杆b;
35.301
‑
机翼前梁、302
‑
翼肋、303
‑
机翼次梁、304
‑
翼膜。
具体实施方式
36.为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
37.实施例1:
38.如图1所示,本实施例公开的一种微小型飞行器机翼扭转和反转的限位驱动装置,包括驱动器101、铰接头102、限位管201、轴承202、203、限位杆204、205,扭转和反转的被控对象为机翼。
39.如图1所示,所述驱动装置1包括驱动器101、铰接头102和电机驱动轴104;所述翻转机构2包括限位管201、轴承a202、轴承b203、限位杆a204和限位杆b205;所述机翼3包括前梁301、翼肋302、次梁303、翼膜304。
40.驱动器101通过铰接头102铰接与飞行器的动力纵轴103和飞行器机身连接。
41.驱动器101带动驱动轴104并与限位管201固连,带动限位管201一同转动。
42.轴承a202和轴承b203安装在限位管201内并粘接在限位管201内壁,而轴承的内轮与机翼前梁301的根部粘接固定。
43.限位杆a204和限位杆b205的一端固定在限位管201外端,随限位管201一同转动。
44.翼肋302垂直粘接在机翼前梁301靠近根部的位置上,安装后处于l型限位杆a204和l型限位杆b205之间的空间中,在l型限位杆a204和l型限位杆b205之间限定的夹角内可自由旋转。
45.如图2所示,旋翼或扑旋翼完成反转的位置使飞行器以固定翼或扑翼飞行模式飞行。
46.如图3(a)所示,旋翼反转前后的位置变化。
47.如图3(b)所示,扑旋翼反转前后的位置变化。
48.本实施例公开的一种微小型飞行器机翼扭转和反转的限位驱动装置的工作方法如下:
49.对于旋翼飞行器,在旋翼飞行模式时安装在纵向转轴103两侧的翼处于轴对称,如图1显示的后行翼所示装置的初始设置为:限位杆a204与限位杆b205之间的夹角0度,与水平面之间的夹角10度,即翼攻角α=10度,在实施翼反转时,启动驱动器101驱动限位管201逆时针转动160度,如图3(a)所示(从翼尖向翼根侧视),与限位管201固连的l型限位杆a204和l型限位杆b205随之转动160度,其中限位杆a204在转动时推动翼肋302也转动160度,最终使翼肋302带动翼前梁301和整个机翼转动160度,使限位杆a204和限位杆b205同时分别转到图3(a)所示204’和205’的位置,两个限位杆互换上下位置,但与水平面之间的夹角仍保持10度,即机翼反转后仍保持α=10度攻角。此时锁住翼的旋转运动,两侧的机翼形成对称布局,实现旋翼
‑
固定翼飞行模式或旋翼
‑
扑翼飞行模式的转换。反之要实现扑翼或固定翼
‑
旋翼飞行模式的反向转换,通过驱动器101驱动限位管201顺时针转动160度,并放开两翼的转动自由度,则返回到初始的旋翼状态。
50.对于扑旋翼飞行器,在扑旋翼飞行模式时安装在纵向转轴103两侧的翼也处于轴对称,如图1显示的后翼所示,装置的初始设置为:l型限位杆a204与水平面之间的夹角
‑
10度,限位杆b205与水平面之间的夹角为30度,限位杆a204与限位杆b205之间的夹角则是40度,那么处于两限位杆之间的翼肋302与扑翼一起可在α=
‑
10~30之间自由扭转。在实施后
行翼反转时,启动驱动器101驱动限位管201逆时针转动160度,如图3(b)所示,与限位管201固连的限位杆a204和限位杆b205随之也转动160度,其中限位杆a204在转动时推动翼肋302共同转动160度,最终使翼肋302带动翼前梁301和整个机翼反转160度。此时限位杆a204转到图3(b)所示204’的位置,与水平面之间的夹角为30度,而限位杆b205转到205’的位置,与水平面之间的夹角为
‑
10度。虽然两个限位杆互换上下位置,机翼反转后仍然在限位杆a和限位杆b构成的40度夹角范围内在α=
‑
10~30度之间自由扭转。此时锁定翼的旋转运动,两侧的机翼形成对称布局,实现了扑旋翼
‑
扑翼飞行模式的转换。反之要实现扑翼
‑
扑旋翼或旋翼飞行模式的反向转换,通过驱动器驱动限位管顺时针转动160度,并放开两翼的转动自由度,则返回到初始的旋翼或扑旋翼状态。
51.扑旋翼
‑
扑翼的运动分为拍动和扭转两个自由度同时进行,其中拍动角幅度由飞行器的驱动机构决定,而扭转角则由两个l型限位杆的位置决定。如图3(b)所示,在上拍过程中,扑翼在惯性力矩和气动力矩作用下自由扭转产生正攻角,最大攻角在扑翼反转前后分别等于l型限位杆b205和限位杆a204’与水平面的夹角;在下拍过程中,扑翼在惯性力矩和气动力矩作用下产生低头扭转角和最小攻角,最小攻角在扑翼反转前后分别等于l型限位杆a204和限位杆b205’与水平面的夹角。
52.以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。