1.本发明属于飞行器领域,具体涉及一种可垂直起降的三飞行模式电动通用飞行器。
背景技术:
2.近些年来,中国通用航空器快速发展,飞行总量年均增长达10%以上,行业规模日益扩大,应用领域不断拓展,飞行种类日益增多,飞行需求渐趋旺盛。促进通用航空的发展,对建设民航强国具有重要意义。通用航空飞行器具有操作简便,对起降场地要求低等诸多优点。
3.电动飞机使用电动力推进系统代替内燃机动力,从而获得了很多优点和独特品质。最突出的优点是节能环保,效率高能耗低,同时实现接近零排放,噪声和振动水平很低,乘坐舒适性好,是名符其实的环境友好飞机。此外,还具有安全可靠(不会发生爆炸和燃料泄漏)、结构简单、操作使用简便、维修性好/费用低、经济性好等特点。在设计上也有很多优势:总体布局灵活,可采用最佳布局和非常规/创新布局;可设计出具有超常性能的飞机,满足特殊用途需求等。
4.旋翼飞行是一种利用前飞时的相对气流吹动旋翼自转以产生升力的旋翼航空器,它的前进力由发动机带动螺旋桨直接提供。借助于旋翼可做近似垂直的降落,垂降技术是50年代末期发展的一项航空技术。使用垂降技术的飞机机动灵活,具有常规飞机无可比拟的优点。首先,具有垂降能力的飞机不需要专门的机场和跑道,可以降低使用成本。另外,垂降飞机只需要很小的场地就可以着陆,大大提高了飞机的战场生存率。
5.v
‑
22倾转旋翼机(绰号:鱼鹰)是美国一型具备垂直起降(短距起降能力的倾转旋翼机。v
‑
22倾转旋翼机在外形上与固定翼飞机相似,但翼尖的两台可旋转的发动机带动两具旋翼,在固定翼状态下,v
‑
22像是一架在两侧翼尖有两个超大的螺旋桨的飞机;在直升机状态下是一架有两个偏小的旋翼的直升机,这样使其具备直升机的垂直升降能力,但又拥有固定翼螺旋桨飞机高速、航程远及油耗较低的优点,最大飞行速度达509千米,是世界上飞最快的直升机。然而v
‑
22在空中发动机停车时,其螺旋桨是发动机转轴驱动的无法自旋着陆。
6.通用飞行器由于具有操作简便、灵活性强等诸多优点具有良好的应用前景,但其由于起飞、降落阶段需要进行滑跑,对飞行场地、环境依赖性高;普通航空通用飞行器由于采用内燃机驱动导致续航时间短,可靠性低,这是本发明所要解决的技术问题。
7.本发明所提出的飞行器设计方案既能以固定翼姿态快速巡航,又能有类似v
‑
22飞行器一样垂直起降,在发动机停车的状态下能够以旋翼式飞行模式安全降落。在巡航状态下飞行器可以依靠太阳能蓄能为飞行器提供动力,延长飞行器的航程。
技术实现要素:
8.要解决的技术问题:
9.为了避免现有技术的不足之处,本发明提出一种可垂直起降的三飞行模式电动通用飞行器,使飞行器具备垂直起飞降落的特性,并减小环境依赖性;在固定翼飞行姿态下太阳能蓄能可以解决飞行的续航短问题;旋翼模式在飞行器失去动力的紧急状态下可以保证飞行器安全降落;从而提高飞行器的灵活性,续航能力以及安全性能。
10.本发明的技术方案是:一种可垂直起降的三飞行模式电动通用飞行器,包括机身1、机翼2、动力系统3、尾翼5、起落架8、座舱9,机翼2位于机身1的两侧,动力系统3设置于机翼2上,尾翼5位于机身1尾部,起落架8位于机身1腹部,座舱9位于机身1上方前端;其特征在于:还包括整流罩4、第一转轴6、第二转轴7、翼撑10、转接机构11;
11.两个动力系统3分别通过两个整流罩4对称安装于两侧机翼2的前缘,动力系统3采用螺旋桨推进,所述螺旋桨为收放式结构,工作状态浆叶展开绕轴旋转,非工作状态浆叶收回至整流罩4上;
12.两侧机翼2通过转接机构11连接为一体,且两侧机翼2与转接机构11的两端分别通过第一转轴6转动连接,第一转轴6的轴向垂直于机身1的对称平面,使得机翼2能够相对转接机构11绕第一转轴6的轴向转动,实现垂直起降姿态与固定翼姿态之间的切换;
13.所述转接机构11通过翼撑10固定于机身1的正上方,翼撑10根部与机身1固定相连,翼撑10的顶部通过第二转轴7与转接机构11转动连接,使得转接机构11带动两侧的机翼2绕第二转轴7旋转,实现固定翼姿态与旋翼姿态的切换。
14.本发明的进一步技术方案是:还包括机载电源,机载电源包括3组电池和应急电源,其中2组电池分别用于动力系统3供电,另1组用于机载设备供电。
15.本发明的进一步技术方案是:所述蒙皮为柔性太阳能电池板蒙皮22,能够吸收太阳能为机载电源蓄能,延长飞行时间。
16.本发明的进一步技术方案是:所述机身1为流线型外形设计;径向截面采用双弧形设计,包括上弧线12和下弧线13,上弧线12取圆的2/3部分,下弧线13取圆的1/4部分;沿轴向的径向截面成等比缩放。
17.本发明的进一步技术方案是:所述机翼2平面形状采用梯形设计,翼型采用椭圆翼型,能够绕第一转轴6旋转的范围为0
‑
100
°
。
18.本发明的进一步技术方案是:所述翼撑10位于机身1对称平面内的截面为梯形,径向截面为椭圆形,由两个椭圆端面桥接形成。
19.本发明的进一步技术方案是:所述转接机构11由局部饼状外罩20和过渡段19组成,饼状外罩20水平投影形状为圆形,竖直截面为椭圆型,饼状外罩20通过过渡段19与机翼2的翼根光滑连接,连接处的剖面为椭圆剖面21。
20.本发明的进一步技术方案是:所述整流罩4包括整流外罩14和凹槽15,凹槽15对称设置于整流外罩14的外周壁面上,作为螺旋桨浆叶的收纳仓,浆叶回收至凹槽15内,整流罩4成圆形截面;所述螺旋桨包括两个浆叶,所述浆叶通过舵机与整流罩4前端连接,由舵机控制浆叶的展开和收回。
21.本发明的进一步技术方案是:所述整流罩4沿轴向的截面成等比收缩。
22.本发明的进一步技术方案是:所述整流外罩14根部与机翼蒙皮为流线型融合设计。
23.有益效果
24.本发明的有益效果在于:
25.本发明所涉及的飞行器方案动力方式采用纯电动的方式,机翼表面装有太阳能柔性电池板蒙皮,在固定翼飞行时可为动力系统电池组蓄能,从而延长其飞行航时。
26.本发明飞行器的两侧机翼通过第一转轴与转接机构连接,将两侧机翼旋转后螺旋桨朝向上方时能够实现垂直起飞和降落,不需要借助机场等外部硬件设施,对飞行起降环境的依赖性小;
27.本发明飞行器在出现空中发动机停车等故障时,机翼绕飞机的第二转轴旋转,螺旋桨收入动力系统的整流外罩中以减少机翼旋转时的阻力,飞行模式切换为目前飞行领域最安全的旋翼机模式进行自转下滑,实现安全降落;
28.本发明飞行器在地面停放状态下,机翼旋转至与机身轴向平行的方向,同时,螺旋桨收入动力系统整流外罩内,所需的地面停放空间更小,停放更方便。
29.本发明飞行器在巡航状态下能以固定翼姿态高速飞行,比普通的旋翼式飞机和直升机相比拥有较高的巡航速度;在发动机发生故障停车时可以转化为旋翼式飞行姿态,能够安全降落;起飞和降落时可以将螺旋桨朝上垂直起降,降低起降的环境要求。该飞行器能够兼具三种不同飞行模式的优点,又能规避单一飞行模式带来的缺陷。
附图说明
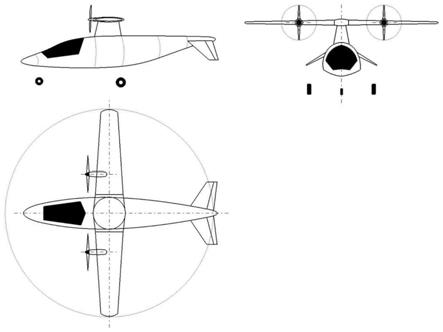
30.图1为方案三面图;
31.图2为方案详细侧视图;
32.图3为方案详细俯视图;
33.图4为机身截面视图;
34.图5为动力系统整流外罩详细视图;
35.图6为转接机构详细视图;
36.图7为垂直起降示意图;
37.图8为旋翼模式示意图;
38.图9为地面停放示意图;
39.附图标记说明:1.机身,2.机翼,3.动力系统,4.整流罩,5.机翼,6.第一转轴,7.第二转轴,8.起落架,9.座舱,10.翼撑,11.转接机构,12.上弧线,13.下弧线,14.整流外罩,15.凹槽,16.截面,17.可动舵面,18.安定面,19.过渡段,20.饼状外罩,21.椭圆剖面,22.柔性太阳能电池板蒙皮。
具体实施方式
40.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
41.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
42.参照图1
‑
3所示,本发明所述的一种可垂直起降的三飞行模式电动飞行器,包括机身1、机翼2、动力系统3、整流罩4、尾翼5、第一转轴6、第二转轴7、起落架8、座舱9、翼撑10、转接机构11以及柔性太阳能电池板蒙皮22;机翼2位于机身1的两侧,动力系统3设置于机翼2上,尾翼5位于机身1尾部,起落架8位于机身1腹部,座舱9位于机身1上方前端;还包括机载电源,机载电源包括3组电池和应急电源,其中2组电池分别用于动力系统3供电,另1组用于机载设备供电。所述蒙皮为柔性太阳能电池板蒙皮22,能够吸收太阳能为机载电源蓄能,延长飞行时间。
43.参照图1和图4所示,所述机身1为流线型外形设计;径向截面采用双弧形设计,包括上弧线12和下弧线13,上弧线12取圆的2/3部分,下弧线13取圆的1/4部分;沿轴向的径向截面成等比缩放。
44.参照图3所示,尾翼5采用倒v型尾翼设计,翼型选用对称翼型,尾翼5由安定面18和可动舵面17构成;
45.参照图1、2所示,起落架8采用前三点式可收放起落架设计;座舱盖采用一体化全玻璃结构设计,中间无加强筋;
46.参照图5所示,两个动力系统3分别通过两个整流罩4对称安装于两侧机翼2的前缘,动力系统3采用螺旋桨推进,所述螺旋桨为收放式结构,工作状态浆叶展开绕轴旋转,非工作状态浆叶收回至整流罩4上;
47.所述整流罩4包括整流外罩14和凹槽15,凹槽15对称设置于整流外罩14的外周壁面上,作为螺旋桨浆叶的收纳仓,浆叶回收至凹槽15内,整流罩4成圆形截面;所述螺旋桨包括两个浆叶,所述浆叶通过舵机与整流罩4前端连接,由舵机控制浆叶的展开和收回。整流罩4沿轴向的截面成等比收缩,整流外罩14根部与机翼蒙皮为流线型融合设计。
48.参照图3、6、7所示,机翼2平面形状采用梯形设计,翼型采用椭圆翼型。两侧机翼2通过转接机构11连接为一体,且两侧机翼2与转接机构11的两端分别通过第一转轴6转动连接,第一转轴6的轴向垂直于机身1的对称平面,使得机翼2能够相对转接机构11绕第一转轴6的轴向转动,旋转的范围为0
‑
100
°
,实现垂直起降姿态与固定翼姿态之间的切换;
49.所述转接机构11由局部饼状外罩20和过渡段19组成,饼状外罩20水平投影形状为圆形,竖直截面为椭圆型,饼状外罩20通过过渡段19与机翼2的翼根光滑连接,连接处的剖面为椭圆剖面21。
50.参照图2、3、7、8、9所示,所述转接机构11通过翼撑10固定于机身1的正上方,翼撑10根部与机身1固定相连,翼撑10的顶部通过第二转轴7与转接机构11转动连接,使得转接机构11带动两侧的机翼2绕第二转轴7旋转,实现固定翼姿态与旋翼姿态的切换。翼撑10位于机身1对称平面内的截面为梯形,径向截面为椭圆形,由两个椭圆端面桥接形成。
51.飞行器在起降时,机翼绕第一转轴6向上倾转,使动力系统3的螺旋桨朝上,即使动力系统3的动力输出由水平输出转换为纵向输出,通过螺旋桨转动产生的拉力使飞机产生向上的升力,从而实现垂直起降;当飞机飞至指定的起降高度时,机翼绕第一转轴6向前倾转,使动力系统的动力输出由纵向输出转换为水平输出,即切换为速度特性和巡航特性更优的固定翼模式,实现固定翼飞行,与从同时,起落架收起;正常降落时过程与起飞时正好相反;
52.飞行器在起降时,飞机的俯仰和姿态控制主要通过调整机翼倾转角的大小和差控
左右发动机螺旋桨的转速来实现;在固定翼巡航飞行或自转旋翼飞行时,其姿态控制主要通过安装在机身尾部的倒v型尾翼来实现;
53.飞行器在起降和正常的空中飞行时,左右两台动力系统3采用分开单独供电的方式,2组电池组分别为左、右侧发动机供电,另1组电池组为机载设备供电,应急电源不工作,在空中巡航飞行过程中,安装在机翼蒙皮表面的柔性太阳能电池板蒙皮22利用太阳能为3组电池组蓄能,以延长其飞行航时;在电池组供电系统空中出现故障时,应急电源开始工作,为机载设备功能,太阳能电池板柔性蒙皮22利用太阳能为应急电池蓄能;
54.旋翼机作为目前世界上最安全的飞行器,在通航领域一直深受飞行爱好者的青睐,本发明中所涉及的飞行器方案在空中动力系统出现故障时,可直接切换为自转旋翼机模式,具体步骤为:动力系统螺旋桨叶片收入动力系统外罩中,以减小飞行时旋翼的阻力,与此同时,转接机构带动机翼绕转轴6转动,从而切换为旋翼机模式;
55.在地面停放时,转接机构连带机翼顺时针转动至与机身平行的位置后锁定,动力系统螺旋桨叶片收入动力系统整流外罩后锁定,以减小地面停放空间和防止地面异物碰撞对飞机造成损坏。
56.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。