1.本发明涉及无人机配套设施技术领域,尤其涉及一种无人机全地形环境下辅助升降作业平台。
背景技术:
2.目前无人机巡检在高压线路上应用越来越广泛,而且无人机还被广泛用作于自然环境的勘查、公共场所社会活动的录影拍摄、道路交通的追踪巡查、无人机大型商演表演等活动中。在山区、丘陵等复杂地形中,亦或是热闹嘈杂的公共场所等开展无人机作业时,往往没有较为平整、干净无尘土飞扬的起飞及降落的地形,所以在过往飞行过程中可能会出现无法起飞、云台进入灰尘或是桨叶磨损等状况发生,造成无人机折损毁坏。加之近些年对于无人机操作飞行越来越严格的条例规定,以及无人机造价的昂贵成本,保证无人机在使用中的安全和完好至关重要。
3.公开号为cn211417635u的专利申请公开了一种用于地理采集的无人机起降平台,设置有指示灯,外壳、内壳、蓄电池、圆台,圆台顶部设置有自发光荧光条,圆台与外壳之间设置有升降台,升降台顶部设置有防滑条,所述升降台底部前后两侧均设置有伸缩连杆,且伸缩连杆均与伸缩连杆内壁底部前后两侧相连接。其用于起降的台面可进行升降,但是只能与规则的物体连接,如汽车顶部的行李架,且台面不能保证水平,对无人机的起降有影响。
4.公开号为cn212333001u的专利申请公开了一种无人机起降平台,包括框架体、平台面板、直角压片;框架体包括第一框架、第二框架、第一连接横梁、l型连接片、第二连接横梁、一字型连接片、垫脚固定板、可调垫脚;2个第一框架竖立间隔布置,2个第一框架之间设有一个以上竖立设置的第二框架,相邻两个框架通过第一连接横梁、第二连接横梁相连接,每个第一框架的两个底角下面均连接有一垫脚固定板和一可调垫脚;一块以上的平台面板平铺安装于框架体的顶面上,平台面板的边沿被数个与框架体连接的直角压片压紧。其为可拆卸结构,可根据实际需要进行扩展,方便运输和组装,成本低,但是不能调整平台面板的水平,因而对无人机的起降有影响。
技术实现要素:
5.本发明的目的是提供一种无人机全地形环境下辅助升降作业平台,为无人机在复杂地形中提供一个水平的起降平台,以保证无人机顺利的起降。
6.为实现上述目的,本发明所采用的技术方案是:
7.一种无人机全地形环境下辅助升降作业平台,包括水平的平台、设置在平台下方的三脚架以及设置在平台和三脚架之间用于调整平台水平的水准器;所述平台与水准器可拆卸连接,所述三脚架和水准器固定连接,所述平台上设有用于将平台上下连通的通孔或豁口,无人机放置在平台顶面。
8.进一步的,所述平台上面扣有罩子,所述无人机位于罩子内部,所述罩子与平台可
拆卸连接。
9.进一步的,所述平台顶面在与无人机的起落架所对应的位置均设有槽,所述起落架位于对应的槽内,所述平台顶面在每个槽的一旁均设有挡板,所述挡板均与平台转动连接,所述起落架依靠挡板的弹性压紧在对应的槽内。
10.进一步的,所述罩子为竖向由下而上依次叠放在平台上的至少两个,相邻的两个罩子之间均为可拆卸连接,靠近平台的罩子与平台可拆卸连接,所述无人机有至少两架,所述无人机分别放置在对应的罩子内。
11.进一步的,所述罩子的顶面在与放置在其上无人机的起落架所对应的位置也设有槽,所述起落架位于对应的槽内,所述平台顶面在每个槽的一旁也设有挡板,所述挡板均与平台转动连接,所述起落架依靠挡板的弹性压紧在对应的槽内。
12.进一步的,所述三脚架包括安装座以及沿圆周方向均布在安装座下部的三个可伸缩的支撑腿,所述安装座与水准器的下部固定连接,所述支撑腿均与安装座转动连接。
13.进一步的,每个支撑腿均包括第二伸缩杆和上部套在第二伸缩杆内可伸缩的第一伸缩杆,所述第一伸缩杆与第二伸缩杆滑动配合,所述第二伸缩杆上端与安装座转动连接,所述第二伸缩杆下端转动连接有用于将第一伸缩杆锁定的第二锁母;所述安装座底部固定设置有竖向的滑杆,所述滑杆上滑动连接有滑块,所述第二伸缩杆和滑块之间均设有连杆,所述连杆两端分别与滑块和对应的第二伸缩杆铰接。
14.进一步的,所述第一伸缩杆内设有可伸缩的支脚,所述第一伸缩杆套在支脚上部,所述第一伸缩杆下端转动连接有用于将支脚锁定的第一锁母。
15.进一步的,所述罩子顶部由若干个同心的圆环和沿圆环径向设置的支杆构成,所述圆环之间有间隙,所述圆环均与支杆固定连接,所述支杆与罩子的侧面固定连接。
16.进一步的,所述支脚底端为尖角。
17.本发明的积极效果为:
18.1、本发明设有平台、三脚架以及水准器,无人机放置在平台上。水准器可保证平台的水平,三脚架可将平台支撑起来,使其远离地面,以适应各种地形环境,从而避免地面上的尘土、杂草、碎石、沙土等附着物对无人机起降的影响。
19.2、平台上设有通孔,将平台上下连通,因而无人机在起降时,其螺旋桨产生的部分气流会穿过通孔,流入平台下方,较小了翼地效应对无人机的影响,使无人机起降时更加容易操控,尤其是降落时,可有效避免无人机因翼地效应的影响而飞偏,甚至导致坠机事故。
20.3、平台上面扣有罩子,所述无人机位于罩子内部,所述罩子与平台通过锁紧装置可拆卸连接。罩子将无人机罩在其内,对无人机形成保护,从而可避免无人机在非飞行时被磕碰而发生损坏,也可以在无人机在转运时形成保护。到达作业现场可迅速将平台与水准器组装,拆下罩子,拨开挡在无人机起落架上的挡板后即可进入待飞状态,提高了作业效率。
21.4、罩子为竖向由下而上依次叠放在平台上的三个,相邻的两个罩子可拆卸连接,相邻的两个罩子之间均通过锁紧装置可拆卸连接,靠下的罩子与平台也通过锁紧装置可拆卸连接。因而本发明可存放三架无人机,在作业现场可依次进行三架无人机的起降作业,可进一步提高作业效率。
附图说明
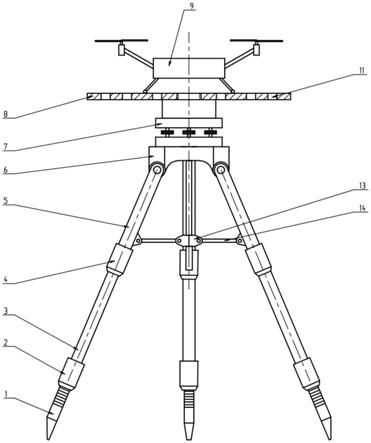
22.图1是实施例1的结构示意图;
23.图2是实施例2的结构示意图;
24.图3是实施例3的结构示意图;
25.图4是平台或实施例3中罩子的俯视图;
26.图5是实施例4中罩子的顶部视图;
27.图6是相邻的罩子之间或罩子与平台之间连接部位的示意图;
28.图中,1、支脚;2、第一锁母;3、第一伸缩杆;4、第二锁母;5、第二伸缩杆;6、安装座;7、水准器;8、平台;9、无人机;10、挡板;11、通孔;12、槽;13、连接块;14、连杆;15、罩子;16、锁紧装置;17、圆环;18、支杆;19、蝶形螺母;20、第一凸耳;21、第二凸耳;22、螺杆;23、第三凸耳。
具体实施方式
29.下面将结合附图,对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施方式仅仅是本技术一部分实施例,而不是全部的实施例。以下对实施方式描述实际上仅仅是说明性的,决不作为对本技术及其应用或使用的任何限制。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
30.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
31.除非另外具体说明,否则在实施方式中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
32.在本技术的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
33.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器
件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
34.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本技术保护范围的限制。
35.下面结合具体实施例和附图对本发明的内容进行进一步的解释和说明,需要注意的是以下实施例仅是较佳实施例,不是全部实施例,不应造成对本发明保护范围的限制。
36.实施例1
37.如图1所示,一种无人机全地形环境下辅助升降作业平台,包括水平的圆形的平台8、设置在平台8下方的三脚架以及设置设置在平台8和三脚架之间用于调整平台8水平的水准器7。所述平台8与水准器7通过螺纹可拆卸连接,所述三脚架和水准器7通过螺钉固定连接,所述平台8上设有用于将平台8上下连通的通孔11,无人机9放置在平台8顶面。
38.通孔11将平台8上下连通,因而无人机9在起降时,其螺旋桨产生的部分气流会穿过通孔,流入平台下方,较小了翼地效应对无人机9的影响,使无人机9起降时更加容易操控,尤其是降落时,可有效避免无人机9因翼地效应的影响而飞偏,甚至导致坠机事故。
39.翼地效应是飞行器接近地面时,地面对其产生的空气动力干扰。当飞行器接近地面飞行时,地面影响到空气绕飞行器的流动特性。翼地效应可产生于低空飞行的飞机或直升机,高速运动的汽车和汽艇也存在这种效应,因而要尽量减小翼地效应,以保证这些飞行器和交通工具的安全运行。
40.所述水准器7是通过调整其上的三个脚螺旋来获得水平的一种装置。
41.所述三脚架包括端部为圆弧的等边三角形的安装座6以及沿圆周方向均布在安装座6下部的三个可伸缩的支撑腿,所述安装座6与水准器7的下部通过螺钉固定连接,所述支撑腿均与安装座6转动连接。
42.所述支撑腿均包括圆筒形的第二伸缩杆5和上部套在第二伸缩杆5内可伸缩的第一伸缩杆3,所述第一伸缩杆3为圆筒形,所述第一伸缩杆3与第二伸缩杆5滑动配合,所述第二伸缩杆5上端分别与安装座6对应的三个端部其中之一转动连接,所述第二伸缩杆5下端转动连接有用于将第一伸缩杆3锁定的第二锁母4。所述安装座6底部焊接有竖向的滑杆,所述滑杆上滑动连接有滑块13,所述第二伸缩杆5和滑块13之间均设有连杆14,所述连杆14两端分别与滑块13和对应的第二伸缩杆5铰接。
43.所述第一伸缩杆3内设有可伸缩的支脚1,所述第一伸缩杆3套在支脚1上部,所述第一伸缩杆3下端转动连接有用于将支脚1锁定的第一锁母2。
44.所述支脚1底端为尖角。
45.三脚架可将平台8支撑起来,使其远离地面,从而避免地面上的尘土、杂草、碎石、沙土等附着物对无人机9起降的影响。
46.本发明在现场的使用方法为:
47.第一步,将三脚架张开,拉出第一伸缩杆4和支脚,支撑在作业现场(可以是碎石地、草丛中、灌木丛中等等),将平台8底部与水准器7连接,通过调整第一伸缩杆3和支脚1伸
出的长度初步调整平台8的水平,然后拧紧第一锁母2和第二锁母4。
48.第二步,在平台8上放置水平尺,通过调整水准器7上的三个脚螺旋,使平台8水平。
49.第三步,取下水平尺,将无人机9放置到平台8上,此时无人机9的旋翼处于同一水平面上,然后可操作遥控器,使无人机9起飞。
50.实施例2
51.如图2、图4和6所示,一种无人机全地形环境下辅助升降作业平台,包括水平的圆形的平台8、设置在平台8下方的三脚架以及设置设置在平台8和三脚架之间用于调整平台8水平的水准器7。所述平台8与水准器7通过螺纹可拆卸连接,所述三脚架和水准器7通过螺钉固定连接,所述平台8上设有用于将平台8上下连通的通孔11,无人机9放置在平台8顶面。
52.通孔11将平台8上下连通,因而无人机9在起降时,其螺旋桨产生的部分气流会穿过通孔11,流入平台下方,较小了翼地效应对无人机9的影响,使无人机9起降时更加容易操控。尤其是在降落时,翼地效应会使无人机9降落时容易“发飘”,因而通过设置通孔11可有效避免无人机9因受到翼地效应的影响而飞偏,甚至导致坠机事故。
53.翼地效应是飞行器接近地面时,地面对其产生的空气动力干扰。当飞行器接近地面飞行时,地面影响到空气绕飞行器的流动特性。翼地效应可产生于低空飞行的飞机或直升机,高速运动的汽车和汽艇也存在这种效应,因而要尽量减小翼地效应,以保证这些飞行器和交通工具的安全运行。
54.所述水准器7是通过调整其上的三个脚螺旋来获得水平的一种装置。
55.所述平台8上面扣有罩子15,所述无人机9位于罩子15内部,所述罩子15与平台8通过锁紧装置16可拆卸连接。
56.所述锁紧装置16包括分别焊接在平台8两侧边缘的第二凸耳21,所述罩子15在与第二凸耳21相对应的位置均焊接有第一凸耳20,所述第一凸耳20和第二凸耳21上均设有径向的豁口,所述豁口内设有竖向的螺杆22,所述第一凸耳20和第二凸耳21均与螺杆22间隙配合,所述螺杆22下端与焊接在第一凸耳21上的第三凸耳23转动连接,所述螺杆22上端螺纹连接有蝶形螺母19。在蝶形螺母19的作用下,第一凸耳20贴紧在第二凸耳21上。
57.所述平台8顶面在与无人机9的起落架所对应的位置均设有槽12,所述起落架位于对应的槽12内,所述平台8顶面在每个槽12的一旁均设有挡板10,所述挡板10均与平台8转动连接,所述起落架依靠挡板10的弹性压紧在对应的槽12内。
58.无人机9通过挡板10压紧在平台8上,罩子15将无人机9罩在其内,对无人机9形成保护,从而可避免无人机9在非飞行时被磕碰而发生损坏,也可以在无人机9在转运时形成保护,到达作业现场可迅速将平台8与水准器7组装,拆下罩子15,拨开挡板10后即可进入待飞状态,提高了作业效率。
59.所述三脚架包括端部为圆弧的等边三角形的安装座6以及沿圆周方向均布在安装座6下部的三个可伸缩的支撑腿,所述安装座6与水准器7的下部通过螺钉固定连接,所述支撑腿均与安装座6转动连接。
60.所述支撑腿均包括圆筒形的第二伸缩杆5和上部套在第二伸缩杆5内可伸缩的第一伸缩杆3,所述第一伸缩杆3为圆筒形,所述第一伸缩杆3与第二伸缩杆5滑动配合,所述第二伸缩杆5上端分别与安装座6对应的三个端部其中之一转动连接,所述第二伸缩杆5下端转动连接有用于将第一伸缩杆3锁定的第二锁母4。所述安装座6底部焊接有竖向的滑杆,所
述滑杆上滑动连接有滑块13,所述第二伸缩杆5和滑块13之间均设有连杆14,所述连杆14两端分别与滑块13和对应的第二伸缩杆5铰接。
61.所述第一伸缩杆3内设有可伸缩的支脚1,所述第一伸缩杆3套在支脚1上部,所述第一伸缩杆3下端转动连接有用于将支脚1锁定的第一锁母2。
62.所述支脚1底端为尖角。
63.三脚架可将平台8支撑起来,使其远离地面,从而避免地面上的尘土、杂草、碎石、沙土等附着物对无人机9起降的影响。
64.本发明在现场的使用方法:
65.1、起飞前准备:
66.第一步,将三脚架张开,拉出第一伸缩杆4和支脚,支撑在作业现场(可以是碎石地、草丛中、灌木丛中等等),将平台8底部与水准器7连接,通过调整第一伸缩杆3和支脚1伸出的长度初步调整平台8的水平,然后拧紧第一锁母2和第二锁母4。
67.第二步,在罩子15顶面放置水平尺,通过调整水准器7上的三个脚螺旋,使平台8水平,此时无人机9的旋翼处于同一水平面上,。
68.第三步,松开蝶形螺母19,摘下罩子15,拨开压在起落架上的挡板10,即可进入待起飞状态。
69.2、无人机降落后,将无人机9的起落架放入对应的槽12内,拨动挡板10,将起落架压紧在槽12内即可,然后罩上罩子15即可。
70.实施例3
71.如图3、图4和6所示,一种无人机全地形环境下辅助升降作业平台,包括水平的圆形的平台8、设置在平台8下方的三脚架以及设置设置在平台8和三脚架之间用于调整平台8水平的水准器7。所述平台8与水准器7通过螺纹可拆卸连接,所述三脚架和水准器7通过螺钉固定连接,所述平台8上设有用于将平台8上下连通的通孔11,无人机9放置在平台8顶面。
72.通孔11将平台8上下连通,因而无人机9在起降时,其螺旋桨产生的部分气流会穿过通孔,流入平台下方,较小了翼地效应对无人机9的影响,使无人机9起降时更加容易操控,尤其是降落时,可有效避免无人机9因翼地效应的影响而飞偏,甚至导致坠机事故。
73.翼地效应是飞行器接近地面时,地面对其产生的空气动力干扰。当飞行器接近地面飞行时,地面影响到空气绕飞行器的流动特性。翼地效应可产生于低空飞行的飞机或直升机,高速运动的汽车和汽艇也存在这种效应,因而要尽量减小翼地效应,以保证这些飞行器和交通工具的安全运行。
74.所述水准器7是通过调整其上的三个脚螺旋来获得水平的一种装置。
75.所述平台8上面扣有罩子15,所述罩子15为竖向由下而上依次叠放在平台8上的三个,相邻的两个罩子15之间均为止口配合,相邻的两个罩子15之间均通过锁紧装置16可拆卸连接,靠下的罩子15与平台8也通过锁紧装置16可拆卸连接。所述无人机9有三架,三架无人机9分别放置在对应的罩子15内。
76.所述平台8顶面在与放置在其上的无人机9的起落架所对应的位置均设有槽12,所述该起落架位于对应的槽12内,所述平台8顶面在每个槽12的一旁均设有挡板10,所述挡板10均与平台8转动连接,该起落架依靠挡板10的弹性压紧在对应的槽12内。
77.所述罩子15的顶面在与放置在其上无人机9的起落架所对应的位置也设有槽12,
所述起落架位于对应的槽12内,所述平台8顶面在每个槽12的一旁也设有挡板10,所述挡板10均与平台8转动连接,所述起落架依靠挡板10的弹性压紧在对应的槽12内。
78.所述锁紧装置16包括分别焊接在平台8或罩子15顶部两侧边缘的第二凸耳21,所述罩子15底部在与第二凸耳21相对应的位置均焊接有第一凸耳20,所述第一凸耳20和第二凸耳21上均设有径向的豁口,所述豁口内设有竖向的螺杆22,所述第一凸耳20和第二凸耳21均与螺杆22间隙配合,所述螺杆22下端与焊接在第一凸耳21上的第三凸耳23转动连接,所述螺杆22上端螺纹连接有蝶形螺母19。在蝶形螺母19的作用下,第一凸耳20贴紧在第二凸耳21上。
79.无人机9通过挡板10压紧在平台8上或该无人机9下面的罩子15顶部,罩子15将无人机9罩在其内,对无人机9形成保护,从而可避免无人机9在非飞行时被磕碰而发生损坏,也可以在无人机9在转运时形成保护,到达作业现场可迅速将平台8与水准器7组装,拆下罩子15,拨开挡板10后即可进入待飞状态,提高了作业效率。
80.同时,在本实施例中,可存放三架无人机9,在作业现场可依次进行三架无人机9的起降作业,可进一步提高作业效率。
81.所述三脚架包括端部为圆弧的等边三角形的安装座6以及沿圆周方向均布在安装座6下部的三个可伸缩的支撑腿,所述安装座6与水准器7的下部通过螺钉固定连接,所述支撑腿均与安装座6转动连接。
82.所述支撑腿均包括圆筒形的第二伸缩杆5和上部套在第二伸缩杆5内可伸缩的第一伸缩杆3,所述第一伸缩杆3为圆筒形,所述第一伸缩杆3与第二伸缩杆5滑动配合,所述第二伸缩杆5上端分别与安装座6对应的三个端部其中之一转动连接,所述第二伸缩杆5下端转动连接有用于将第一伸缩杆3锁定的第二锁母4。所述安装座6底部焊接有竖向的滑杆,所述滑杆上滑动连接有滑块13,所述第二伸缩杆5和滑块13之间均设有连杆14,所述连杆14两端分别与滑块13和对应的第二伸缩杆5铰接。
83.所述第一伸缩杆3内设有可伸缩的支脚1,所述第一伸缩杆3套在支脚1上部,所述第一伸缩杆3下端转动连接有用于将支脚1锁定的第一锁母2。
84.所述支脚1底端为尖角。
85.三脚架可将平台8支撑起来,使其远离地面,从而避免地面上的尘土、杂草、碎石、沙土等附着物对无人机9起降的影响。
86.本发明在现场的使用方法:
87.1、起飞前准备:
88.第一步,将三脚架张开,拉出第一伸缩杆4和支脚,支撑在作业现场(可以是碎石地、草丛中、灌木丛中等等),将平台8底部与水准器7连接,通过调整第一伸缩杆3和支脚1伸出的长度初步调整平台8的水平,然后拧紧第一锁母2和第二锁母4。
89.第二步,在罩子15顶面放置水平尺,通过调整水准器7上的三个脚螺旋,使平台8水平,此时无人机9的旋翼处于同一水平面上,。
90.第三步,松开蝶形螺母19,摘下靠上的罩子15,拨开压在对应的无人机9的起落架上的挡板10,操作遥控器,使该无人机9起飞。
91.第四步,由上至下依次松开对应的蝶形螺母19,依次摘下对应的罩子15,使无人机9依次起飞。
92.2、降落
93.无人机降落后,将无人机9的起落架放入对应的槽12内,拨动挡板10,将起落架压紧在槽12内即可,然后罩上罩子15,向上扳动对应的螺杆22,拧紧对应的蝶形螺母19。之后下一架无人机9降落。如此重复,直到最后一架无人机9降落,并罩上对应的罩子15,拧紧对应的蝶形螺母19。
94.实施例4
95.如图5所示,本实施例与实施例3的不同之处在于,所述罩子15顶部由若干个同心的圆环17和沿圆环17径向设置的六根支杆18构成,六根支杆18沿圆周均布。所述圆环17之间有间隙,所述圆环17均与支杆18焊接,所述支杆18外端均与罩子15的侧面焊接。无人机9的起落架通过绑扎带与圆环17可拆卸连接。
96.圆环17更有利于减小翼地效应对无人机9起降的影响,同时无人机9降落时,同心的圆环形成靶子,更便于无人机9通过其上的摄像头进行定位,方便无人机9的降落。
97.以上所述的实施例描述内容较为详细和具体,表达了本发明的优选实施例,仅用于说明本发明的技术思想及特点,其目的在于使本领域内的技术人员能够理解本发明的内容并据以实施,但并不仅仅局限于本发明,不能仅以本实施例来限定本发明的专利范围,即凡本发明所揭示的精神所做的同等变化或修饰,对于本领域的研究人员或技术人员来讲,在不脱离本发明的结构之内,系统内部的局部改进和子系统之间的改动、变换等,仍是本发明的专利范围内。